自适应阈值化操作:adaptiveThreshold()函数
在图像阈值化操作中,更关注的是从二值化图像中,分离目标区域和背景区域,但是仅仅通过设定固定阈值很难达到理想的分割效果。而自适应阈值,则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值。这样做的好处:
1. 每个像素位置处的二值化阈值不是固定不变的,而是由其周围邻域像素的分布来决定的。
2. 亮度较高的图像区域的二值化阈值通常会较高,而亮度低的图像区域的二值化阈值则会相适应的变小。
3. 不同亮度、对比度、纹理的局部图像区域将会拥有相对应的局部二值化阈值。
函数原型
. void adaptiveThreshold(InputArray src, OutputArray dst,
. double maxValue, int adaptiveMethod,
. int thresholdType, int bolckSize, double C)
参数说明
参数1:InputArray类型的src,输入图像,填单通道,单8位浮点类型Mat即可。
参数2:函数运算后的结果存放在这。即为输出图像(与输入图像同样的尺寸和类型)。
参数3:预设满足条件的最大值。
参数4:指定自适应阈值算法。可选择ADAPTIVE_THRESH_MEAN_C 或 ADAPTIVE_THRESH_GAUSSIAN_C两种。(具体见下面的解释)。
参数5:指定阈值类型。可选择THRESH_BINARY或者THRESH_BINARY_INV两种。(即二进制阈值或反二进制阈值)。
参数6:表示邻域块大小,用来计算区域阈值,一般选择为3、5、7......等。
参数7:参数C表示与算法有关的参数,它是一个从均值或加权均值提取的常数,可以是负数。(具体见下面的解释)。
//--------------------------------------------------------------------------------------------------------------------------------------------------------------------------
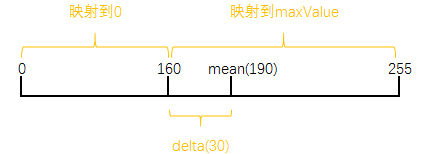
ADAPTIVE_THRESH_MEAN_C,为局部邻域块的平均值,该算法是先求出块中的均值,再减去常数C。
ADAPTIVE_THRESH_GAUSSIAN_C,为局部邻域块的高斯加权和。该算法是在区域中(x, y)周围的像素根据高斯函数按照他们离中心点的距离进行加权计算,再减去常数C。
举个例子:如果使用平均值方法,平均值mean为190,差值delta(即常数C)为30。那么灰度小于160的像素为0,大于等于160的像素为255。如下图:
如果是反向二值化,如下图:
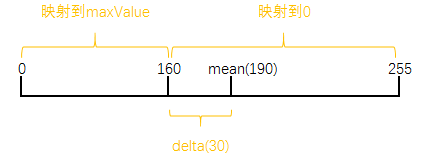
delta(常数C)选择负值也是可以的。
代码演示
/*
自适应阈值:adaptiveThreshold()函数
*/ #include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv; int main()
{
//------------【1】读取源图像并检查图像是否读取成功------------
Mat srcImage = imread("D:\\OutPutResult\\ImageTest\\build.jpg");
if (!srcImage.data)
{
cout << "读取图片错误,请重新输入正确路径!\n";
system("pause");
return -;
}
imshow("【源图像】", srcImage);
//------------【2】灰度转换------------
Mat srcGray;
cvtColor(srcImage, srcGray, CV_RGB2GRAY);
imshow("【灰度图】", srcGray);
//------------【3】初始化相关变量---------------
Mat dstImage; //初始化自适应阈值参数
const int maxVal = ;
int blockSize = ; //取值3、5、7....等
int constValue = ;
int adaptiveMethod = ;
int thresholdType = ;
/*
自适应阈值算法
0:ADAPTIVE_THRESH_MEAN_C
1:ADAPTIVE_THRESH_GAUSSIAN_C
--------------------------------------
阈值类型
0:THRESH_BINARY
1:THRESH_BINARY_INV
*/
//---------------【4】图像自适应阈值操作-------------------------
adaptiveThreshold(srcGray, dstImage, maxVal, adaptiveMethod, thresholdType, blockSize, constValue); imshow("【自适应阈值】", dstImage);
waitKey();
return ;
}
显示结果
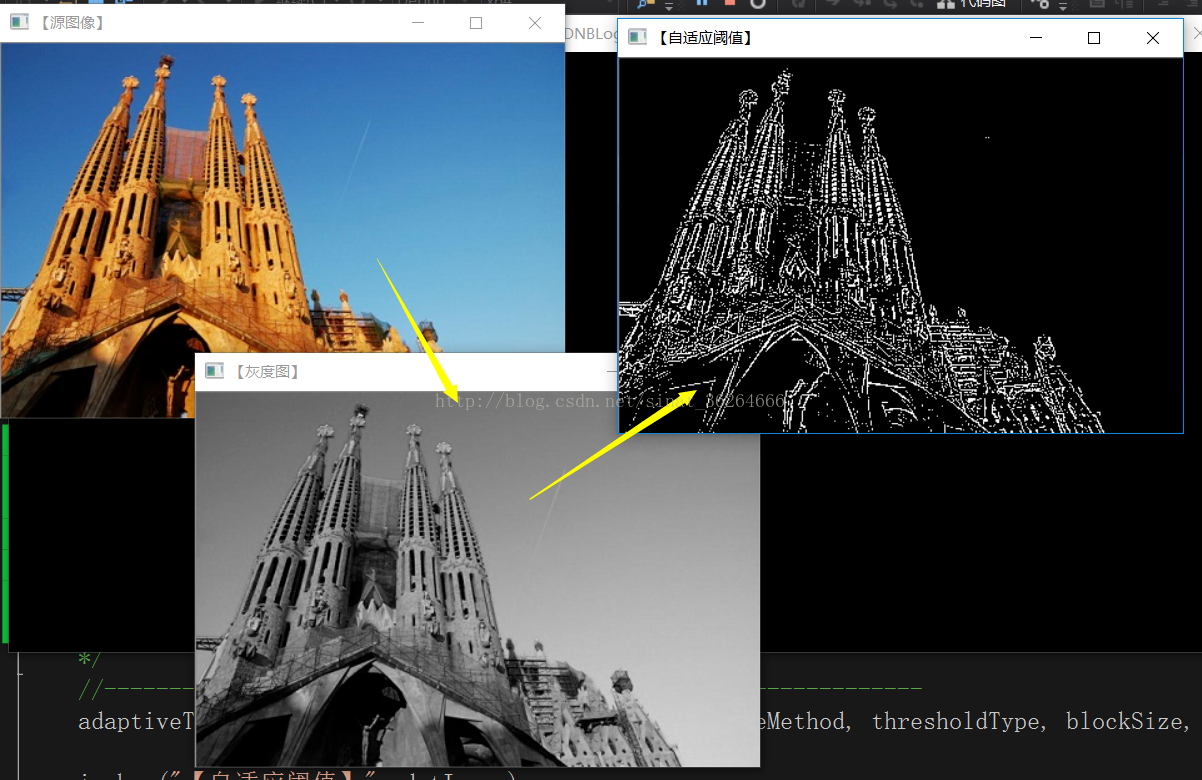
可以发现自适应阈值能很好的观测到边缘信息。阈值的选取是算法自动完成的,很方便。
滤波处理
另外,做不做滤波处理等对图像分割影响也比较大。
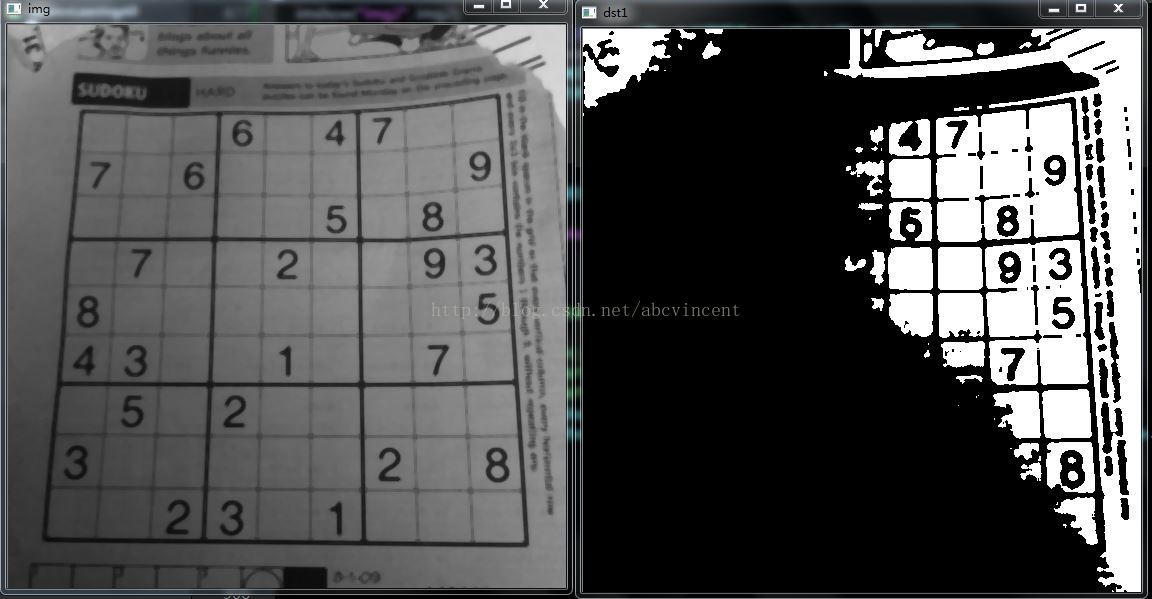
1. adaptiveThreshold分割
Mat img=imread("D:/ImageTest/sudoku.png",CV_LOAD_IMAGE_COLOR);
Mat dst1;
Mat dst2;
Mat dst3;
cv::cvtColor(img,img,COLOR_RGB2GRAY);//进行,灰度处理
medianBlur(img,img,);//中值滤波
threshold(img,dst1, , , THRESH_BINARY);//阈值分割
adaptiveThreshold(img,dst2,,ADAPTIVE_THRESH_MEAN_C,THRESH_BINARY,,);//自动阈值分割,邻域均值
adaptiveThreshold(img,dst3,,ADAPTIVE_THRESH_GAUSSIAN_C,THRESH_BINARY,,);//自动阈值分割,高斯邻域
//ADAPTIVE_THRESH_MEAN_C : threshold value is the mean of neighbourhood area
//ADAPTIVE_THRESH_GAUSSIAN_C : threshold value is the weighted sum of neighbourhood values where weights are a gaussian window.
imshow("dst1", dst1);
imshow("dst2", dst2);
imshow("dst3", dst3);
imshow("img", img);
waitKey();
效果对比,很明显加入邻域权重后处理更理想:

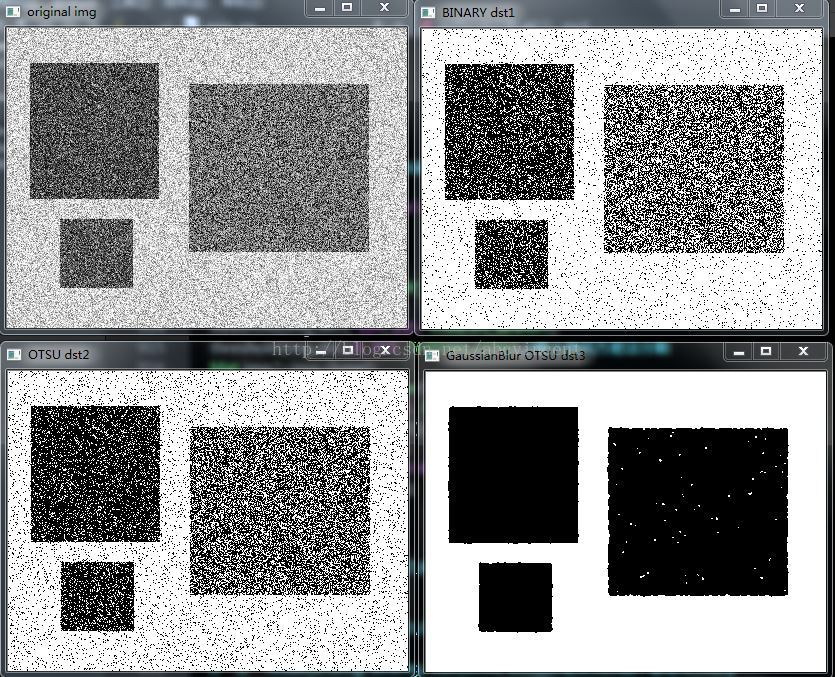
2. 加入滤波处理的最大类间方差分割
Mat img=imread("D:/ImageTest/pic2.png",CV_LOAD_IMAGE_COLOR);
Mat dst1;
Mat dst2;
Mat dst3;
cv::cvtColor(img,img,COLOR_RGB2GRAY);//进行,灰度处理
// medianBlur(img,img,5);
threshold(img,dst1, , , THRESH_BINARY);
threshold(img,dst2,, , THRESH_OTSU);//最大类间方差法分割 Otsu algorithm to choose the optimal threshold value
Mat img2=img.clone();
GaussianBlur(img2,img2,Size(,),);//高斯滤波去除小噪点
threshold(img2,dst3, , , THRESH_OTSU);
imshow("BINARY dst1", dst1);
imshow("OTSU dst2", dst2);
imshow("GaussianBlur OTSU dst3", dst3);
imshow("original img", img);
waitKey();
效果如下,显然不滤波和滤波差别明显:
参考文章:https://blog.csdn.net/sinat_36264666/article/details/77586964
https://blog.csdn.net/abcvincent/article/details/78822191
自适应阈值化操作:adaptiveThreshold()函数的更多相关文章
- 图像阈值化-threshold、adaptivethreshold
在图像处理中阈值化操作,从一副图像中利用阈值分割出我们需要的物体部分(当然这里的物体可以是一部分或者整体).这样的图像分割方法是基于图像中物体与背景之间的灰度差异,而且此分割属于像素级的分割.open ...
- opencv2函数学习之threshold:实现图像阈值化
在opencv2中,threshold函数可以进行阈值化操作. double threshold( const Mat& src, Mat& dst, double thresh,do ...
- OpenCV3编程入门笔记(4)腐蚀、膨胀、开闭运算、漫水填充、金字塔、阈值化、霍夫变换
腐蚀erode.膨胀dilate 腐蚀和膨胀是针对图像中的白色部分(高亮部分)而言的,不是黑色的.除了输入输出图像外,还需传入模板算子element,opencv中有三种可以选择:矩形MORPH_RE ...
- OpenCV阈值化处理
图像的阈值化就是利用图像像素点分布规律,设定阈值进行像素点分割,进而得到图像的二值图像.图像阈值化操作有多种方法,常用方法有经典的OTSU.固定阈值.自适应阈值.双阈值及半阈值化操作.这里对各种阈值化 ...
- opencv之图像阈值化处理
一.函数简介 1.threshold-图像简单阈值化处理 函数原型:threshold(src, thresh, maxval, type, dst=None) src:图像矩阵 thresh:阈值 ...
- opencv python 图像二值化/简单阈值化/大津阈值法
pip install matplotlib 1简单的阈值化 cv2.threshold第一个参数是源图像,它应该是灰度图像. 第二个参数是用于对像素值进行分类的阈值, 第三个参数是maxVal,它表 ...
- Vulkan移植GpuImage(一)高斯模糊与自适应阈值
自适应阈值效果图 demo 这几天抽空看了下GpuImage的filter,移植了高斯模糊与自适应阈值的vulkan compute shader实现,一个是基本的图像处理,一个是组合基础图像处理聚合 ...
- 第十四节,TensorFlow中的反卷积,反池化操作以及gradients的使用
反卷积是指,通过测量输出和已知输入重构未知输入的过程.在神经网络中,反卷积过程并不具备学习的能力,仅仅是用于可视化一个已经训练好的卷积神经网络,没有学习训练的过程.反卷积有着许多特别的应用,一般可以用 ...
- opencv —— threshold、adaptiveThreshold 固定阈值 & 自适应阈值 进行图像二值化处理
阈值化 在对图像进行处理操作的过程中,我们常常需要对图像中的像素做出取舍与决策,直接剔除一些低于或高于一定值的像素. 阈值分割可以视为最简单的图像分割方法.比如基于图像中物体与背景之间的灰度差异,可以 ...
随机推荐
- Codeforces 1060C Maximum Subrectangle(子矩阵+预处理)
题意:给出数组a,b,组成矩阵c,其中$c_{ij}=a_i*b_j$,找出最的大子矩阵,使得矩阵元素和<=x,求这个矩阵的size n,m<=2000 思路:对于子矩阵(l1...r1) ...
- lua学习之表达式篇
表达式 表达式用于表达值 lua 中表达式可以为数字常量,自变字符串,变量,一元和二元操作符,函数调用.函数定义.table 构造式 算数操作符 一元操作符 -负号 二元操作符 -减号 / ^ % x ...
- 题解【Luogu P6102 谔运算】
\[ \texttt{Description} \] 给出一个长度为 \(n\) 的数列 \(a\),求 \(\sum\limits_{i=1}\limits^{n}\sum\limits_{j=1} ...
- 工业狗转行AI的心路历程
2020年2月16日,晴 昨晚下了一场雪,大概是晚上八九点的样子,细碎的雪花在无风的夜里直嗖嗖的往下掉,门前的轿车顶上覆了薄薄的一层.路灯下的小巷格外的寂静,裹着我的睡衣在昏黄的灯光下站了许久,冠状病 ...
- 单线程的REDIS为什么这么快?
REDIS是单线程处理所有请求,和一般经典实际上推荐的方式相反,那么单线程串行处理,为什么依然能够做到很快呢?知乎上的一个答案如下,其中线程切换和锁不是性能主要影响因素的观点和一般的答案都不同: 作者 ...
- pytorch之 batch_train
import torch import torch.utils.data as Data torch.manual_seed(1) # reproducible BATCH_SIZE = 5 # BA ...
- Kvm 简介 安装 使用 桥接网络
KVM 全称是 基于内核的虚拟机(Kernel-based Virtual Machine),它是一个 Linux 的一个内核模块,该内核模块使得 Linux 变成了一个 Hypervisor: 它由 ...
- CentOS7下部署rsync服务
说明: 在CentOS7下部署rsync服务和在CentOS6上部署基本上是一样的,只是CentOS7自带了rsyncd启动脚本,由systemd管理而已. rsync服务端配置 [root@SERV ...
- 赛狗日源码分享 《Head First C#》第三版
目录 前言 效果展示 步骤 熟读任务说明 搭界面 开始代码 From.cs Greyhound.cs Guy.cs Bet.cs 写在后面的话 本次遇见的一些问题 关于优化 可以设定狗的特性 去掉Be ...
- 一个sql
一个小功能,sql里面用到了一些玩法,记录一下~ SELECT id, code, path, (1) AS type FROM department WHERE path LIKE CONCAT( ...