技术分享 | 车载以太网gPTP时间同步:从协议到工程实践
01 引言
随着车载网络从 CAN 总线向以太网迁移,传统毫秒级同步精度已无法满足多传感器融合、线控系统协同的需求。
比如在多传感器时空对齐中,激光雷达的点云、摄像头的图像、毫米波雷达的回波信号,需在同一时间基准下融合。而当以 120km/h 车速计算,1ms 的时间偏差会导致 3.3cm 的空间误差,造成自动驾驶的安全风险。
因此,gPTP 通过 ±50ns 同步精度的设计目标,为传感器融合提供了 “时间锚点”。
02 gPTP协议
相较于工业场景的 PTP(IEEE 1588),gPTP 针对车载环境做了三项关键优化:
(1)简化的 BMCA(最佳主时钟算法):减少节点角色切换频率,避免了车载网络拓扑变化频繁导致的同步不稳定;
(2)固定的消息间隔:同步帧(Sync)默认间隔为125ms(logSyncInterval=-3),延迟请求帧(Pdelay_Req)默认间隔为1s(logPdelayReqInterval=0),降低网络带宽占用;
(3)增强的时间戳机制:支持硬件级时间戳的精准捕获,抵消车载电磁环境对软件时间戳的干扰。
03 Linux PTP 工具链
简单来说,LinuxPTP 并非单一工具,而是一套模块化的时间同步解决方案,其核心组件主要包括ptp4l,phc2sys,pmc。
(1)ptp4l:是gPTP 协议的核心实现,主要负责时钟角色协商(主 / 从)、时间消息收发、延迟测算与时钟校准。支持边界时钟(BC)、普通时钟(OC)两种模式,适配车载网络的层级拓扑;
(2)phc2sys:是解决 “硬件时钟与系统时钟异步” 问题的工具。车载 ECU 通常存在 PHC(物理层硬件时钟)与系统时钟(OS Clock)两个计时源,phc2sys 通过 PI调节算法,将两者偏差控制在 10ns 以内;
(3)pmc:是PTP 管理客户端,支持查询时钟状态(如GET TIME_STATUS_NP)、配置参数(如SET PORT_PROPERTIES),是调试阶段的 “可视化窗口”。
这套工具链的优势在于车载场景适配性,其自带了automotive-master.cfg与automotive-slave.cfg配置文件,已经预设符合 IEEE 802.1AS-2011 的关键参数(如transportSpecific=0x1、ptp_dst_mac=01:80:C2:00:00:0E),避免了从零开始的参数调试成本。
04 gPTP工程实践
1、时间同步硬件选型
gPTP从协议到工程实践,首先需要确保硬件满足“时间敏感”特性,具体指标如下:
(1)PHC 硬件时钟:需支持 IEEE 1588 硬件时间戳;
(2)网卡驱动:必须支持SOF_TIMESTAMPING_TX_HARDWARE与SOF_TIMESTAMPING_RX_HARDWARE标志,以确保收发时间戳由硬件直接生成,而非软件间接计算,从而避免软件栈延迟带来的误差。一般可通过ethtool -T eth0命令验证。
2、主从时钟配置要点
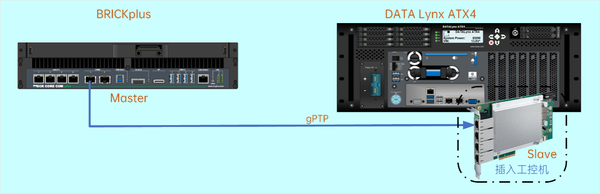
车载网络的时间同步采用 “主从架构”,其核心是通过配置文件明确节点角色与行为边界。如下图所示,以工控机搭建案例实现gPTP时间同步配置。
主时钟配置(automotive-master.cfg),通常部署在域控制器或中央网关,需重点配置:
(1)gmCapable=1:声明具备 “全局主时钟(GM)” 能力;
(2)masterOnly=1:强制为主模式,避免 BMCA 算法导致的角色切换;
(3)logSyncInterval=-3:同步消息间隔设为 125ms(2^-3 秒),平衡精度与带宽;
(4)delay_mechanism=P2P:采用点对点延迟机制,减少多节点级联的误差累积。
启动命令需指定接口与配置文件:sudo ptp4l -i eth0 -f automotive-master.cfg -m(-m参数用于输出详细日志,便于调试)。

从时钟配置(automotive-slave.cfg),通常部署在传感器节点、执行器 ECU,关键配置包括:
(1)slaveOnly=1:固定为从模式,避免抢占主时钟角色;
(2)step_threshold=1:允许时间跳变校正(初始同步阶段);
(3)servo_offset_threshold=30:当偏差超过 30ns 时启动 PID 调节;
(4)ignore_source_id=1:忽略主时钟源 ID 变化,增强容错性。
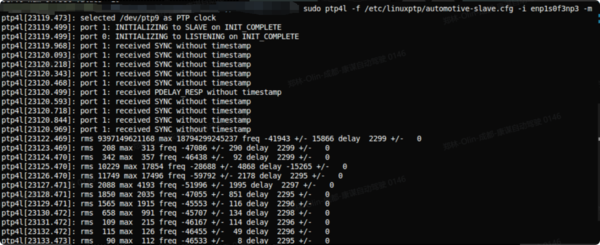
启动后需通过pmc命令验证同步状态:pmc -u -b 0 -d 1 "GET TIME_STATUS_NP"(正常状态下offsetFromMaster应稳定在 ±50ns 以内)。
3、系统级同步(PHC 与系统时钟对齐)
当ptp4l 完成了 PHC 时钟的同步,若 ECU 的系统时钟(如 Linux CLOCK_REALTIME)与 PHC 脱节,应用层仍会获取错误时间。这一步我们可以通过 phc2sys 工具解决:
(1)sudo phc2sys -s eth0 -c CLOCK_REALTIME -O 50 -m;
(2)-s eth0:以网卡 PHC 为时间源;
(3)-c CLOCK_REALTIME:同步至系统时钟;
(4)-O 50:50表示目标偏移量设为50μs,允许phc2sys在同步时存在一个50μs的容忍范围,避免频繁调节;
(5)-m:输出调节日志。
调试时需关注offset值(PHC 与系统时钟偏差),稳定后应≤10ns,否则需检查系统负载(高 CPU 占用会影响调节精度)。
05 总结
在车载以太网的技术栈中,gPTP 不像 CAN FD、SOME/IP 那样直观可见,却像 “神经系统” 般支撑着整个系统的协同运作。
LinuxPTP 作为开源工具链,为 gPTP 的工程落地提供了低成本路径,但从协议到实践开发,还需完成硬件适配、主从时同配置、系统级同步等步骤。
技术分享 | 车载以太网gPTP时间同步:从协议到工程实践的更多相关文章
- 爱奇艺技术分享:爱奇艺Android客户端启动速度优化实践总结
本文由爱奇艺技术团队原创分享,原题<爱奇艺Android客户端启动优化与分析>. 1.引言 互联网领域里有个八秒定律,如果网页打开时间超过8秒,便会有超过70%的用户放弃等待,对Andro ...
- 车载以太网第二弹|测试之实锤-TC8 TCP/IP协议一致性测试实践
前言 车载以太网测试实践系列,我们还分享了PMA测试实践.IOP测试实践 .本期给大家介绍的是TC8中的TCP/IP协议一致性测试(以下简称TCP/IP测试). TCP/IP测试-设备环境组成 TTw ...
- 车载以太网第二弹|测试之实锤-AVB测试实践
背景 AVB(Audio Video Bridging)音视频桥接,是由IEEE 802.1标准委员会的IEEE AVB任务组制定的一组技术标准,包括精确时钟同步.带宽预留和流量调度等协议规范,用于构 ...
- 车载以太网第二弹|测试之实锤 -DoIP测试开发实践
前言 车载以太网测试之实锤系列,之前我们已经从环境设备组成.被测对象组成再到测试过程和测试结果分析,分享了完整的PMA测试 .IOP测试 .TC8中的TCP/IP协议一致性测试 .也分享了1000BA ...
- 千兆车载以太网TSN网络测试?TSN Box为您焕新
TSN概述 在汽车领域内,近几年车内网络通讯方式的变革诉求,期望能够有更高的数据传输速率,以及保证实时性的通讯方式引入.例如对于自动驾驶而言,传统的CAN总线已经远远不能满足其对通讯的要求,而基于以太 ...
- 罗德与施瓦茨公司和TSN Systems公司为车载以太网提供纳秒级精度延时测量
前言 随着毫米波雷达.激光雷达和摄像头等传感器的大量出现,并要求海量的传感器数据在几毫秒内传输完成并处理,使得网络延迟问题变得越发重要.测试和测量的专家Rohde&Schwarz(以下简称R& ...
- 车载以太网第二弹|测试之实锤-1000BASE-T1 IOP测试实践
背景 车载以太网通信技术在汽车行业的应用速度远超预期,去年本土OEM已经上市了应用100BASE -T1的车型.今年,应用1000BASE -T1的车型预计也将会量产上市.针对测试而言,带来另外一个难 ...
- 感知开源的力量-APICloud Studio开源技术分享会
2014.9.15 中国领先的“云端一体”移动应用云服务提供商APICloud正式发布2015.9.15,APICloud上线一周年,迎来第一个生日这一天,APICloud 举办APICloud St ...
- 恒天云技术分享系列4 – OpenStack网络攻击与防御
恒天云技术分享系列:http://www.hengtianyun.com/download-show-id-13.html 云主机的网络结构本质上和传统的网络结构一致,区别大概有两点. 1.软网络管理 ...
- 【技术分享】手把手教你使用PowerShell内置的端口扫描器
[技术分享]手把手教你使用PowerShell内置的端口扫描器 引言 想做端口扫描,NMAP是理想的选择,但是有时候NMAP并不可用.有的时候仅仅是想看一下某个端口是否开放.在这些情况下,PowerS ...
随机推荐
- 洛谷 P3201 [HNOI2009] 梦幻布丁
洛谷 P3201 [HNOI2009] 梦幻布丁 祭我AC的第十道紫题. 听了一下午的 才调出来. 题意分析 洛谷传送门 给一个序列a,有两种操作-- 1 x y将序列中所有x全部变成y 2查询当前序 ...
- 【2020.11.19提高组模拟】二次剩余two 题解
[2020.11.19提高组模拟]二次剩余two 题解 题目描述 有\(n\)个二次函数,每个二次函数可以用两个值\(m,k\)描述: \[f(x)=(x-m)^2+k \] 现在有\(q\)次操作: ...
- Java IO<5>管道流PipedOutputStream PipedInputStream
在java中,PipedOutputStream和PipedInputStream分别是管道输出流和管道输入流.它们的作用是让多线程可以通过管道进行线程间的通讯.在使用管道通信时,必须将PipedOu ...
- Springboot笔记<13>单元测试
单元测试 Spring Boot 2.2.0 版本开始引入 JUnit 5 作为单元测试默认库,使用@SpringBootTest注解会以springboot的环境启动 JUnit5常用注解 @Tes ...
- 前/后向自动微分的简单推导与rust简单实现
自动微分不同于数值微分与符号微分, 能够在保证速度的情况下实现高精度的求某个可微函数的定点微分值. 下面将简要介绍其原理, 并给出 rust 的两种微分方式的基本实现. 微分方法简介 数值微分 利用微 ...
- 总结下参与以及看到的一些好的业务设计的 pattern
B端C端进行分离: 单场景业务应用表:业务表进行分离 对于B端系统来说,如发钱系统,B端需要存储 订单id.是否发放成功.通知状态等信息,有可能还会有发放失败,审核驳回等无用数据记录,但是对于C端用户 ...
- K8s 1.29.3 on Docker
初始化 # 关闭防火墙 selinux systemctl disable --now firewalld setenforce 0 sed -i '/SELINUX=/s@enforcing@dis ...
- 如何用三层防护体系打造坚不可摧的 API 安全堡垒?
扫描二维码 关注或者微信搜一搜:编程智域 前端至全栈交流与成长 发现1000+提升效率与开发的AI工具和实用程序:https://tools.cmdragon.cn/ FastAPI 安全与认证综合实 ...
- 网络流最大流Dinic算法
感谢董晓老师:博客,b站 /* Dinic算法的思路是,用bfs进行分层,限制后面dfs每次的搜索深度, 并且,在dfs的过程中,直接把当前这个路走到u的容量限制分给u的各个出边 */ #includ ...
- layui 关于table 导入方法
<!--导入数据操作层--><div class="layui-form-item"> <div class="layui-form- ...