性能度量之Confusion Matrix
例子:一个Binary Classifier
假设我们要预测图片中的数字是否为数字5。如下面代码。
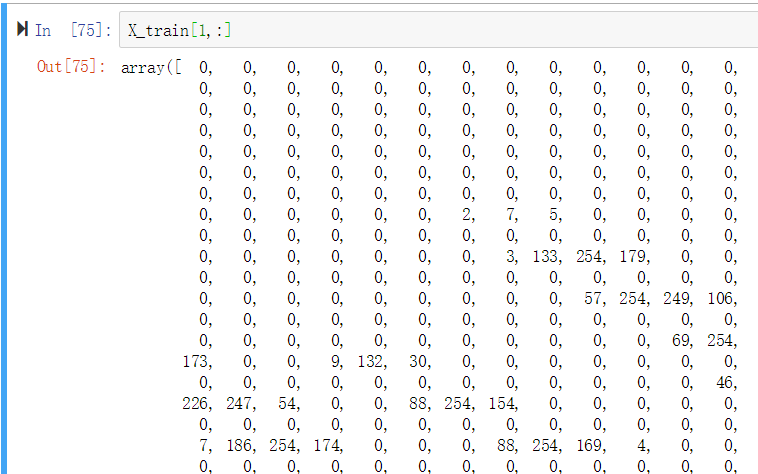
X_train为训练集,每一个instance为一张28*28像素的图片,共784个features,每个feature代表某个像素的颜色强度(0-255之间)。y_train_5为label, boolean类型的向量。
from sklearn.linear_model import SGDClassifier
sgd_clf = SGDClassifier(random_state=42)
sgd_clf.fit(X_train, y_train_5)
784个features:
label,True代表是5,False代表非5.

使用Cross-Validation计算精确度
我们使用sklearn的cross validation,对训练集进行分层抽样为3份,每次对不同的抽样进行评估(训练则是使用其他另外2份抽样)。

我们发现,准确率非常高,高的让人怀疑。 如果图片中10%都是5的话,那么我们可以自定义一个模型,不用训练,只是在predict的时候,输出false,即一直认为所有图片里的数字都不是5,那么达到的准确率也是90%,如下所示: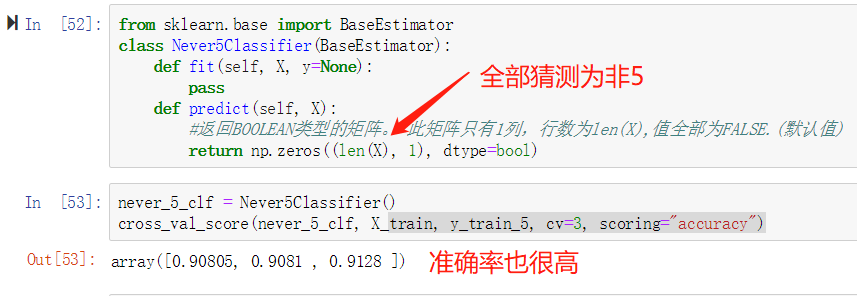
所以,从上面的例子说明,评估模型的性能不能单单看准确率,特别是面对倾斜数据(skewed datasets)的时候(某些类别的频率很高的情况)。
Confusion Matrix
Confusion Matrix背后的思想是计算Class A的实例被归类为Class B的次数。我们的例子使用的是二元分类(confusion matrix矩阵包含两行两列),但是对多元分类同样适用。
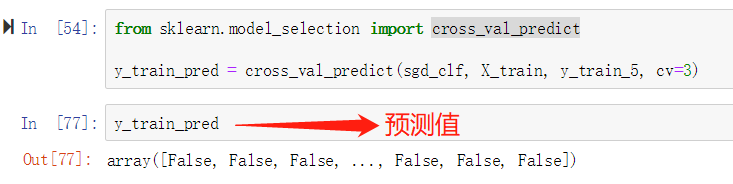
前面,我们使用cross validation计算的是准确性(scoring="accuracy"),为求出confusion matrix,我们需要得到具体的预测值,而不是score="accuracy"。我们通过cross_val_predict求出训练集的预测值y_train_pred。True, False分别表示判断出对应的图片/实例是5后者不是5
然后通过使用confusion_matrix计算出confusion matrix如下。另外,我们还看到,如果将预测值修改为实际值,左下右上的值都为0,下面我们将详细介绍其含义。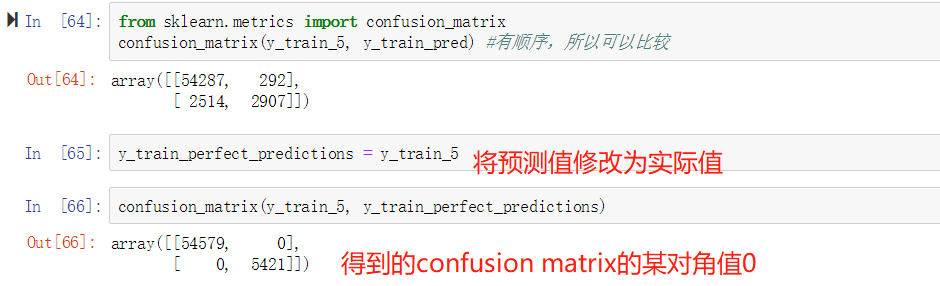
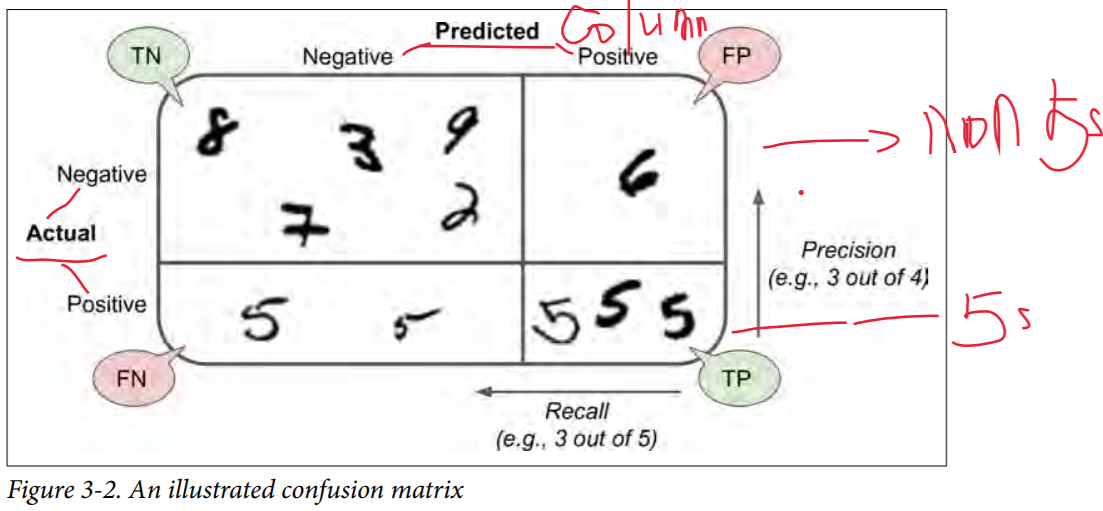
在上面的confusion矩阵中,每行表示真实的分类(actual class),而每列代表预测的分类(predicted class)。第一行全部为非5的图片(nagative class),第二行全部为5的图片(positive class)。因为是二元分类,所以矩阵的shape是(2,2)即两行两列。第一行中,第一列的值代表54287张图片被正确地判断为非5(真阴性,Ture Nagative),第二列的值代表292张图片被错误地判断为5(假阳性, False Positive)。第二行中,第一列的值代表2514张图片被错误地判断为非5(False Nagative),第二列的值2907张图片被正确地判断为5(True Positive). 所以,完美的分类算法是只有True Natative 和 True Positive的。Confusion Matrix包含的信息很多,我们可以求出精确度:Precision = TP/(TP+FP)。但是仅仅精确度是没法衡量模型性能的,我们同时也要看reacall:Recall = TP/(TP+FN)。希望下面这张图能能更清楚地表达Conofusion Matrix。
Precision精确度 , Recall(Also sensitivity, TPR-true positive rate) 召回率
我们通过sklearn求出的precision和recall和我们之前得到的confusion matrix一致。precision表示当模型识别一张图片为5时,正确率在90%以上。但是,它只识别了53%为5的图片,很差劲对吧?
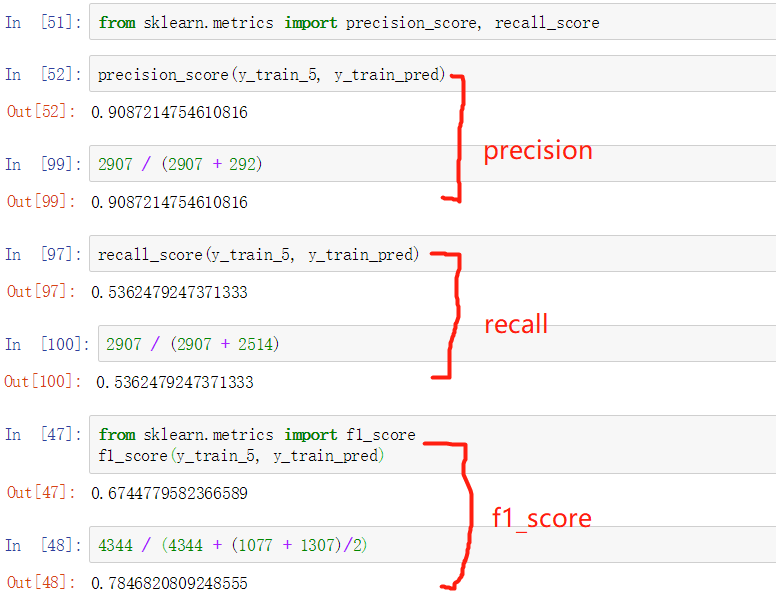
我们可以将两者的调和平均数(harmonic mean) F1 score作为单独的度量来使用。因为当两者值都高时,F1 score才会高。公式如3-3所示。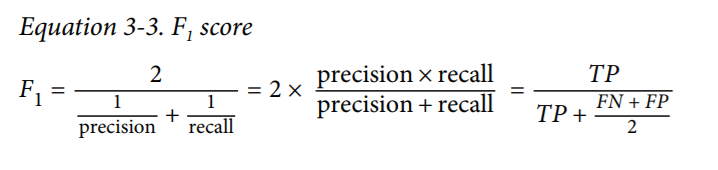
也有一些时候,我们可能并不关心F1 score(两者的综合得分)。可能更关心precision或者更关心recall. 比如,我们需要过滤掉少儿不宜的视频(识别有害视频),这个时候,我们应该看重的是precision。(模型宁可把正常的视频当成有害的,也不能把有害的当成正常的). 再比如,超市的监控系统通过画面识别偷窃行为,那可能更需要关注recall。(我们宁可多一些误报,也不想放过真正的小偷造成损失)。不幸的是,我们不能同时提高两者,增加一个,势必减小另一个,如同某个算法的空间复杂度和时间复杂度一样需要平衡。这叫做precision/recall tradeoff。下面我们详细说明。
Precision / Recall Tradeoff
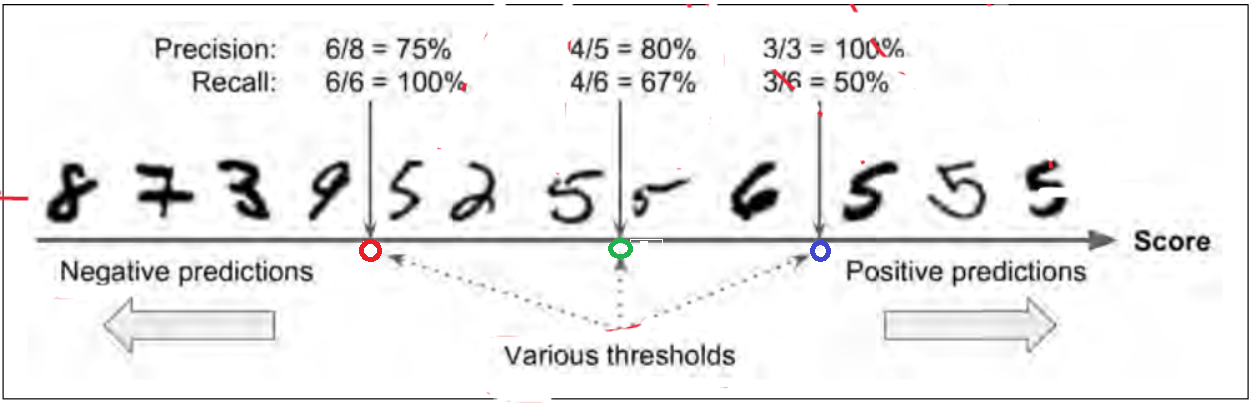
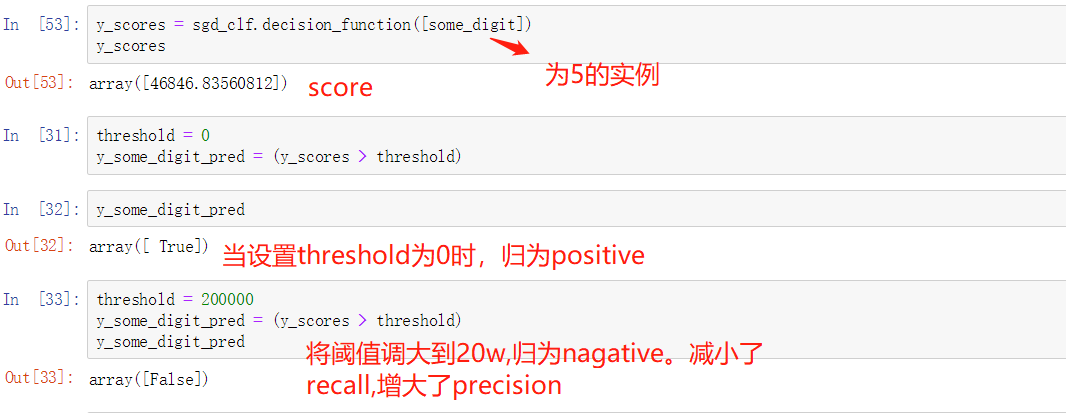
对于每个实例,模型会根据一个decision function计算出score,凡是score大于某个阈值(threshold),就归为positive 类,小于则归为nagative类。此例子中的SDGClassifier使用0作为默认的阈值。下图中,score从左至右增大。如果我们将阈值设置为绿圈所在值,那么绿圈右边全被判断为5,左边全部被识别成非5. precision=4/(4+5)=80%, recall=4/(4+2)=67%。 如果我们将阈值向右移动到蓝圈处(增大阈值),我们计算的precision=3/(3+0)=100%, recall=3/(3+3)=50%。通过增大阈值,我们增大了precision,减小了recall. 同样,我们如果将阈值移到红圈的地方(减小阈值),则增大了recall,减小了precision。
sklearn没有直接设置阈值去predict的方法,不过,我们可以通过decision_function计算出score来调整结果。如下所示,some_digit是某个实际值为5的图片。
为了设置阈值,我们需要通过cross validation先计算出所有实例的score(而不是预测结果),然后通过sklearn的precision_recall_curve画出precision和recall随着不同阈值变化的曲线图
y_scores = cross_val_predict(sgd_clf, X_train, y_train_5, cv=3, method="decision_function")
from sklearn.metrics import precision_recall_curve
precisions, recalls, thresholds = precision_recall_curve(y_train_5, y_scores)
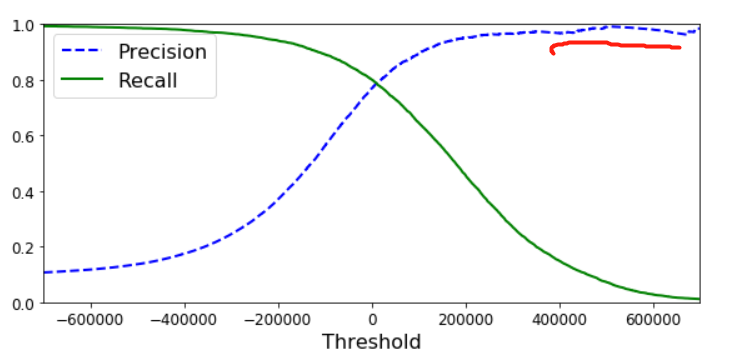
你是否注意到precision的曲线并不像recall那样平滑,事实上,当增加threshold的时候,precision是不一定增加的,而recall一定不会增加。比如,我们将之前的阈值从绿圈向右移动到绿圈蓝圈之间(数字5,6之间),相比绿圈,其precision=3/(3+1)=75%,反而下降了。recall=3/(3+3)=50%,下降属于正常。这就解释了为什么precision曲线不一定很平滑。现在,你可以选择阈值达到precision/recall平衡来适应你的需求了。我们也可以直接画出两者的关系,来选择平衡点。
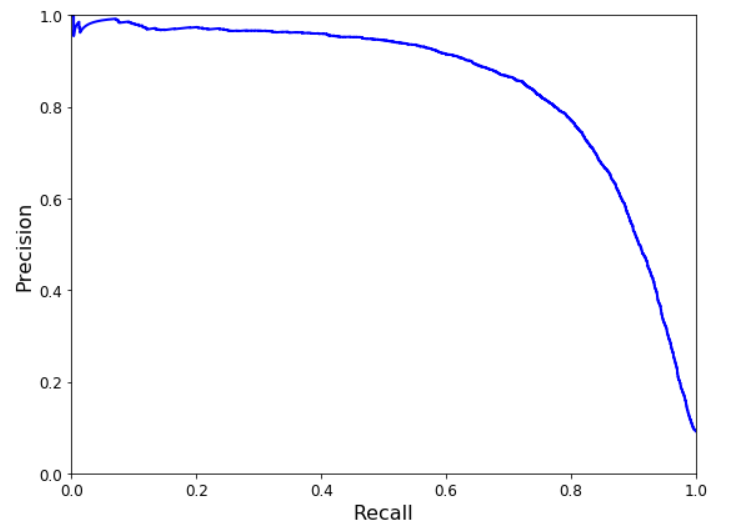
我们可以看到,precision在80%后,下降的很厉害(recall上升的很厉害),所以,你可能想选择有一个在大幅度下降之前的值,recall为60% 。 我们可以通过上一张图确定阈值大概为70000(需要zoom),运行如下代码得到新的预测值。
y_train_pred_90 = (y_scores > 70000)
验证precision/recall
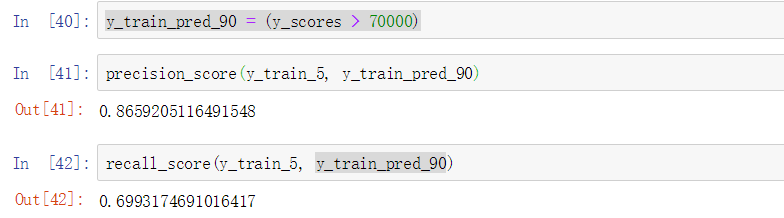
了解了confusion matrix后,如果某某声称其模型的precision很高时,我们应该问模型的recall是多少。因为任何一个很低的时候,模型大多情况下是没有太大意义的。
性能度量之Confusion Matrix的更多相关文章
- 机器学习性能度量指标:AUC
在IJCAI 于2015年举办的竞赛:Repeat Buyers Prediction Competition 中, 很多参赛队伍在最终的Slides展示中都表示使用了 AUC 作为评估指标: ...
- 机器学习性能度量指标:ROC曲线、查准率、查全率、F1
错误率 在常见的具体机器学习算法模型中,一般都使用错误率来优化loss function来保证模型达到最优. \[错误率=\frac{分类错误的样本}{样本总数}\] \[error=\frac{1} ...
- 吴裕雄 python 机器学习——模型选择分类问题性能度量
import numpy as np import matplotlib.pyplot as plt from sklearn.svm import SVC from sklearn.datasets ...
- 【分类问题中模型的性能度量(一)】错误率、精度、查准率、查全率、F1详细讲解
文章目录 1.错误率与精度 2.查准率.查全率与F1 2.1 查准率.查全率 2.2 P-R曲线(P.R到F1的思维过渡) 2.3 F1度量 2.4 扩展 性能度量是用来衡量模型泛化能力的评价标准,错 ...
- ML01 机器学习后利用混淆矩阵Confusion matrix 进行结果分析
目标: 快速理解什么是混淆矩阵, 混淆矩阵是用来干嘛的. 首先理解什么是confusion matrix 看定义,在机器学习领域,混淆矩阵(confusion matrix),又称为可能性表格或是 ...
- 混淆矩阵(Confusion matrix)的原理及使用(scikit-learn 和 tensorflow)
原理 在机器学习中, 混淆矩阵是一个误差矩阵, 常用来可视化地评估监督学习算法的性能. 混淆矩阵大小为 (n_classes, n_classes) 的方阵, 其中 n_classes 表示类的数量. ...
- 机器学习-Confusion Matrix混淆矩阵、ROC、AUC
本文整理了关于机器学习分类问题的评价指标——Confusion Matrix.ROC.AUC的概念以及理解. 混淆矩阵 在机器学习领域中,混淆矩阵(confusion matrix)是一种评价分类模型 ...
- P,R,F1 等性能度量(二分类、多分类)
总结自<机器学习>周志华 2.3 目录 最常用的是查准率P(precision),查全率R(recall),F1 一.对于二分类问题 二.对于多分类问题 1.macro 2.micro 最 ...
- 性能度量RMSE
回归问题的典型性能度量是均方根误差(RMSE:Root Mean Square Error).如下公式. m为是你计算RMSE的数据集中instance的数量. x(i)是第i个实例的特征值向量 ,y ...
随机推荐
- linux下安装rar
1. sudo wget https://www.rarlab.com/rar/rarlinux-x64-5.5.0.tar.gz 2.解压 tar -zxf rarlinux-5.0.1.tar.g ...
- OGG故障集锦(一)
说明:此系列仅作OGG故障记录,未包含处理过程.仅作故障备案 ① ERROR OGG-00519 Source Context : SourceModule : [ggapp.ddl] Sourc ...
- ios下引用MUI后input不能输入,Android端正常
原因是mui框架的有个css样式 *{ -webkit-user-select: none; } 其作用是禁掉用户可以选中页面中的内容. 添加以下style样式即可 input{ -webkit-us ...
- SQL语句中生成UUID方法
SQL语句中生成UUID方法为UUID() 生成带横线UUID: select UUID() 形如:abaffaca-fd55-11e5-b3d0-d2 ...
- swift3.0 保存图片到本地,申请权限
1.info中写上 <key>NSCameraUsageDescription</key> <string>需要您的同意才能读取媒体资料库</string&g ...
- 大数据学习--day08(hnapp 后台系统开发、面向对象)
hnapp 后台系统开发.面向对象 利用前面所学的知识,写一个控制台登陆注册后台界面 package sy180918.hnapp.array; import java.util.Arrays; im ...
- python基础 抽象类(接口类)
Python中没有接口.接口类,抽象类:定义 制定一个规范 #必须要导入from abc import ABCMeta,abstractmethod class Payment(metaclass = ...
- python教程(二)·数据类型
数据类型,顾名思义就是数据的类型,数据到底有哪些类型呢?在python中,最基本的数据类型有好几种,让我来逐个介绍. 整数类型(int) python中只有一种整数类型,就是int类型,在程序中的写法 ...
- Artistic Style 3.1
Artistic Style 3.1 Tab 选项 下面的示例显示空白字符.一个空格(space)用一个 . 表示,一个制表符(tab)用 > (大于号) 表示. ** 默认缩进 ** 如果没有 ...
- 数据结构中的hash
最近接触数据结构的时候突然发现一直在使用哈希表,哈希算法.那么到底什么是哈希(hash).查找资料发现一个比较有意思的解释,在此分享一下. 人家说的很好我就直接粘过来. =============== ...