AStar算法()
把网上的AStar算法的论述自己实现了一遍,一开始只是最基础的实现。当然,现在AStar算法已经演变出了各种优化的版本,这篇也会基于各种优化不断的更新。
如果对算法不熟悉可以看下Stanford的这篇文章,我觉得是讲解的十分仔细的了:http://theory.stanford.edu/~amitp/GameProgramming/,也附上国内的翻译:http://blog.csdn.net/coutamg/article/details/53923717
讲讲我对上面这篇文章的理解:
(1)AStar算法的核心就在于这个公式了f(n) = g(n) + h(n),算法的效果如何也都取决于这个公式。就如文章中说的,g(n)可以看做从start到current所花费的cost,h(n)从current到end的花费。
很多人会直接将这两个当做距离来计算,这是在忽略地形等条件影响下最简单的模型。对于每一步,我们可以确定g(n)的准确值,但是h(n)很难预估正确的值(特别是在复杂且大型的场景中)。文章中也提供了几种解决方案比如waypoint等。
(2)算法维护着两张表openlist和closelist,openlist初始化时将start加入。
在循环寻找路径时,将openlist中优先级最高的元素取出,移入closelist中,表示该点已经“探测”过。对该点的周围N个neighbor进行检测,符合条件将其加入openlist中,并对openlist进行优先级排序。
既然是对基础的简单理解,就不多说直接贴上代码:
using System.Collections;
using System.Collections.Generic;
using UnityEngine; public class AStar { public enum POINT_TYPE
{
normal,
obstacle,
} public class POINT:System.IComparable
{
float _gValue, _hValue;
public float gValue
{
get
{
return _gValue;
}
set
{
_gValue = value;
fValue = AStar.GetFValue(pos,gValue,hValue);
}
} public float hValue
{
get
{
return _hValue;
}
set
{
_hValue = value;
fValue = AStar.GetFValue(pos, gValue, hValue);
}
}
public float fValue
{
get;
private set;
}
public Vector2 pos, parent;
public POINT_TYPE type; public int CompareTo(object obj)
{
POINT pt = obj as POINT;
if (fValue < pt.fValue)
return -;
else if (fValue == pt.fValue)
return ;
else
return ;
} } public Dictionary<Vector2, POINT> points = new Dictionary<Vector2, POINT>();
public static Vector2 startPt, endPt; public List<POINT> openList = new List<POINT>();
public List<POINT> closeList = new List<POINT>(); public bool finish = false; public static float GetFValue(Vector2 pt,float gValue,float hValue)
{
Vector2 vec1 = pt - startPt;
Vector2 vec2 = endPt - startPt;
float fac = Vector3.Cross(new Vector3(vec1.x, vec1.y, ), new Vector3(vec2.x, vec2.y, )).normalized.z > ? 0.01f : -0.01f;
return gValue + 2f * hValue + fac;
} float GetManhattanDistance(Vector2 pos1, Vector2 pos2)
{
return Mathf.Abs(pos1.x - pos2.x) + Mathf.Abs(pos1.y - pos2.y);
} List<POINT> GetNeighbours(Vector2 pt)
{
List<POINT> neighbouts = new List<POINT>();
if (points.ContainsKey(new Vector2(pt.x - , pt.y)))
neighbouts.Add(points[new Vector2(pt.x - , pt.y)]);
if (points.ContainsKey(new Vector2(pt.x + , pt.y)))
neighbouts.Add(points[new Vector2(pt.x + , pt.y)]);
if (points.ContainsKey(new Vector2(pt.x, pt.y +)))
neighbouts.Add(points[new Vector2(pt.x, pt.y +)]);
if (points.ContainsKey(new Vector2(pt.x, pt.y - )))
neighbouts.Add(points[new Vector2(pt.x, pt.y - )]);
return neighbouts;
} public void Init(List<POINT> pts,Vector2 start,Vector2 end)
{
foreach (POINT pt in pts)
{
points.Add(pt.pos, pt);
} startPt = start;
endPt = end; points[startPt].parent = start;
points[startPt].gValue = ;
points[startPt].hValue = Mathf.Abs(startPt.x - endPt.x) + Mathf.Abs(startPt.y - endPt.y); openList.Add(points[startPt]); finish = false;
} public void StepNext()
{
if (finish)
return; POINT current = openList[];
openList.Remove(current);
closeList.Add(current);
if (current.pos == endPt)
{
finish = true;
return;
} List<POINT> neighbours = GetNeighbours(current.pos);
for (int i = ; i < neighbours.Count; i++)
{
if (neighbours[i].type == POINT_TYPE.obstacle || closeList.Contains(neighbours[i]))
continue; bool needSort = false;
float gValue =GetManhattanDistance(neighbours[i].pos,startPt);
float hValue = GetManhattanDistance(neighbours[i].pos,endPt);
float fValue = AStar.GetFValue(neighbours[i].pos,gValue,hValue); if (openList.Contains(neighbours[i]))
{
if (neighbours[i].fValue > fValue)
{
neighbours[i].gValue = gValue;
neighbours[i].hValue = hValue;
needSort = true;
}
}
else
{
neighbours[i].gValue = gValue;
neighbours[i].hValue = hValue;
neighbours[i].parent = current.pos;
openList.Add(neighbours[i]);
needSort = true;
} if (needSort)
openList.Sort();
} } }
简单的标注这几行:
49-58 :继承于IComparable接口类,并且重写了CompareTo方法。这样就可以利用List<T>.Sort()来排序了。在CompareTo方法中,当fValue相等时,hValue值小具有更高的priority。关于fValue相同的情况在论文中有阐述。
71-77:根据g(n),h(n)计算f(n)。上面说的算法的核心公式是f(n) = g(n) + h(n),但是很多时候这样简单的相加并不能适应各种复杂的情况。考虑这样一种情况:
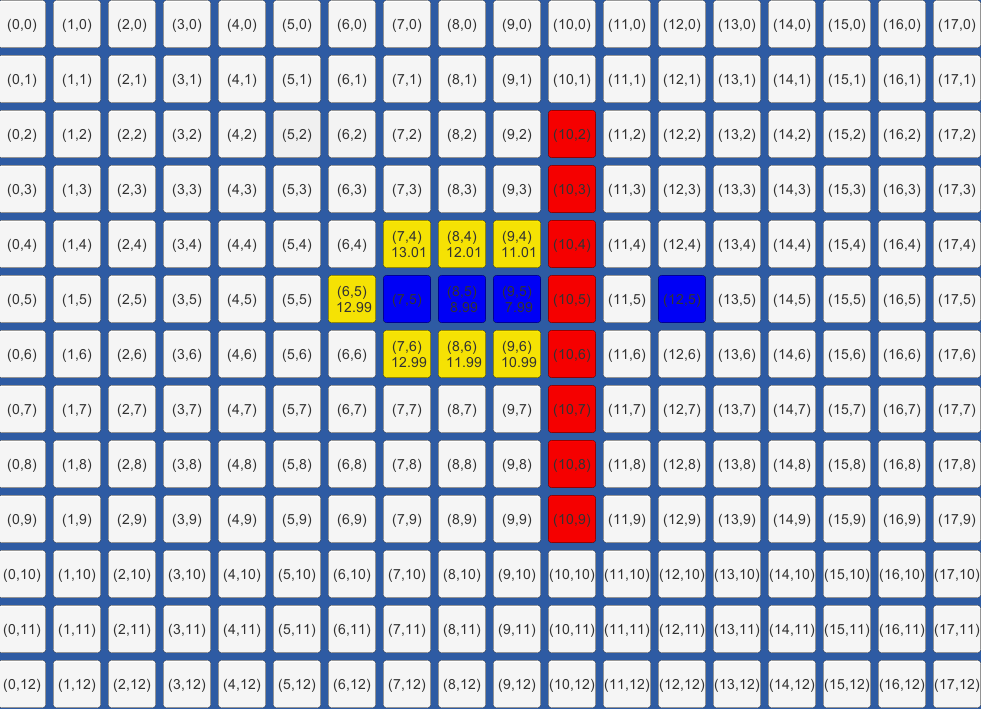
(请忽略这张图中坐标下的数值(f值),并不与代码相符)
蓝色为当前探测的点,黄色为待探测的点。若用公式f(n) = g(n) + h(n)此时有两种相等(f和h都相同)的情况,这样将增大计算的消耗。这里简单的用了cross函数使相等时总是能选择某一侧作为偏向。
138-139:g和h的值分别为n点到start和end点的曼哈顿距离(x,y轴上距离相加),这里其实只是近似值,并且g的值其实来说并不准确。上文说道g值对于每一步的计算来说都是可以确定的。在本例中暂且这样,下一例中改进。
来看一下算法的效果:


第一张图从(0,10)到(14,2),第二张图从(0,12)到(14,2)。绿色为算法最终输出的路径,黄色与蓝色为检测的范围。
而在实现过程中也法线了g和h对算法的影响。当g>>h时,算法偏向于全方位的检测,当h>>g时,算法偏向于向end点方向检测。
AStar算法()的更多相关文章
- [原创]南水之源A*(A-Star)算法
开发导航之前我看了一些A*(A-Star)算法的例子和讲解.没有求得甚解!不过也从A*(A-Star)算法中得到启发,写了一套自己的A*(A-Star)算法.当然,这不是真正(我也不知道)的A*(A- ...
- 启发式搜索A-Star算法 【寻找 最短路径 算法】【地理几何位置 可利用的情况】
在处理最短路径问题时,有一种启发式算法是我们应该了解的,由于其有着优秀的探索效率在各自现实项目中多有应用,它就是 A-star 算法,或 A* 算法. 个人观点: A* 算法并不保证找到的路径一 ...
- AStar算法的学习
摘自:http://www.cnblogs.com/hxsyl/p/3994730.html A*算法的java实现 import java.util.ArrayList; import java.u ...
- 【网络资料】Astar算法详解
关于A*算法,很早就想写点什么,可是貌似天天在忙活着什么,可事实又没有做什么,真是浮躁啊!所以今晚还是来写一下总结吧! A*算法是很经典的只能启发式搜索算法,关于只能搜索算法和一般的搜索算法(例如DF ...
- AStar算法(转载)
以下的文章来至http://blog.csdn.net/debugconsole/article/details/8165530,感激这位博主的翻译,可惜图片被和谐了,所以为方便阅读,我重新把图片贴上 ...
- aStar算法求第k短路
A*的概念主意在于估计函数,f(n)=g(n)+h(n),f(n)是估计函数,g(n)是n节点的当前代价,h(n)是n节点的估计代价:而实际中,存在最优的估计函数f'(n)=g'(n)+h'(n),那 ...
- poj 2449 Remmarguts' Date 求第k短路 Astar算法
=.=好菜 #include <iostream> #include <cstdio> #include <string.h> #include <cstri ...
- a-star算法
http://blog.csdn.net/shanshanpt/article/details/8977512 这篇文章讲得不错. 所谓的启发函数,所谓权值之类(此处所谓的权值就是路劲的长度).YES ...
- 算法:Astar寻路算法改进
早前写了一篇<RCP:gef智能寻路算法(A star)> 出现了一点问题. 在AStar算法中,默认寻路起点和终点都是N x N的方格,但如果用在路由上,就会出现问题. 如果,需要连线的 ...
随机推荐
- Bootstrap3基础 栅格系统 标尺(col-lg/md/sm/xs-1)
内容 参数 OS Windows 10 x64 browser Firefox 65.0.2 framework Bootstrap 3.3.7 editor ...
- Appium测试安卓apk遇到的问题及解决方法
1.Showing error - “Returned value cannot be converted to WebElement: {ELEMENT=1} 解决方法:https://sqa.s ...
- js注意点:数组比较大小方法及数组与对象的区别
(迁移自旧博客2017-04-19) 快速复制数组及数组比较大小方法 首先介绍一下复制数组的方法: var arr = ['A', 'B', 'C', 'D', 'E', 'F', 'G']; var ...
- tcp config
$ sudo sysctl net.ipv4.tcp_reordering=1 $ sudo sysctl net.ipv4.tcp_thin_linear_timeouts=1 $ sudo sys ...
- 使用教育邮箱激活JetBrains全家桶
如果你还有在校时的邮箱,比如your_name@xxx.edu或者your_name@xxx.edu.cn的邮箱,那么你可以免费激活JetBrains全家桶. JetBrains Toolbox 专业 ...
- MySQL卸载安装8.0.*
一.卸载 1. 本人安装目录在C盘Program Files文件中(删除MySQL文件夹) 2. 找到C盘Program Data隐藏文件夹中的MySQL并删除(删除提示MySQL在运行的话可以去任务 ...
- C语言--第1次作业2.0版
1.本章学习总结 1.1思维导图 1.2本章学习体会及代码量学习体会 1.2.1学习体会 经过一周C语言的正式课堂学习,不同于暑期时扒视频囫囵吞枣式学习,林丽老师的讲解详细异常,尽管已经学习了一部分内 ...
- Java内存模型探秘
1.Java内存模型概述 Java内存模型是一种抽象概念,不是真实存在的.主要定义了程序中各个变量的访问规则,即在虚拟机中将变量存储到内存和从内存取出变量这样的底层细节.注意:这里的变量仅包括实例字段 ...
- .NET Core通过过滤器和中间件两种方式实现全局异常捕获和日志记录
1.一共有五类过滤器IAsyncAuthorizationFilter IAsyncResourceFilter IAsyncActonFilter IAsyncExceptionFilter ...
- JQuery 数组获取和删除元素
<script> var target = []; target [0] = "aaa000"; target [1] = "bbb111"; ta ...