Windows环境下编译Assimp库生成Android可用的.so或.a文件
在做项目过程中需要使用Assimp这个3D模型读取库来读取obj格式的模型,因为项目是基于Android平台,采用NDK开发,所以就打算编译Assimp库并生成.so文件。本文使用Assimp-v.5.0.0.rc1(https://github.com/assimp/assimp/releases/tag/v.5.0.0.rc1),此版本已经支持在导入FBX的同时导入blendshape。网上的资料大多比较老,针对assimp-3.3的比较多,新版本的编译还是有些不同,特记录下。
首先我们看下Assimp中blenshape导入的代码:以FBX为例 在FBXConverter.cpp中,也就是说blendshape以顶点动画的形式 保存在了aiAnimMesh这个数据结构中,后续对bs的操作只需要操作对应的aiAnimMesh即可。
/** @brief An AnimMesh is an attachment to an #aiMesh stores per-vertex
* animations for a particular frame.
std::vector<aiAnimMesh*> animMeshes;
for (const BlendShape* blendShape : mesh.GetBlendShapes()) {
for (const BlendShapeChannel* blendShapeChannel : blendShape->BlendShapeChannels()) {
const std::vector<const ShapeGeometry*>& shapeGeometries = blendShapeChannel->GetShapeGeometries();
for (size_t i = 0; i < shapeGeometries.size(); i++) {
aiAnimMesh *animMesh = aiCreateAnimMesh(out_mesh);
const ShapeGeometry* shapeGeometry = shapeGeometries.at(i);
const std::vector<aiVector3D>& vertices = shapeGeometry->GetVertices();
const std::vector<aiVector3D>& normals = shapeGeometry->GetNormals();
const std::vector<unsigned int>& indices = shapeGeometry->GetIndices();
animMesh->mName.Set(FixAnimMeshName(shapeGeometry->Name()));
for (size_t j = 0; j < indices.size(); j++) {
unsigned int index = indices.at(j);
aiVector3D vertex = vertices.at(j);
aiVector3D normal = normals.at(j);
unsigned int count = 0;
const unsigned int* outIndices = mesh.ToOutputVertexIndex(index, count);
for (unsigned int k = 0; k < count; k++) {
unsigned int index = outIndices[k];
animMesh->mVertices[index] += vertex;
if (animMesh->mNormals != nullptr) {
animMesh->mNormals[index] += normal;
animMesh->mNormals[index].NormalizeSafe();
}
}
}
animMesh->mWeight = shapeGeometries.size() > 1 ? blendShapeChannel->DeformPercent() / 100.0f : 1.0f;
animMeshes.push_back(animMesh);
}
}
}
const size_t numAnimMeshes = animMeshes.size();
if (numAnimMeshes > 0) {
out_mesh->mNumAnimMeshes = static_cast<unsigned int>(numAnimMeshes);
out_mesh->mAnimMeshes = new aiAnimMesh*[numAnimMeshes];
for (size_t i = 0; i < numAnimMeshes; i++) {
out_mesh->mAnimMeshes[i] = animMeshes.at(i);
}
}
return static_cast<unsigned int>(meshes.size() - 1);
}
下面正式开始编译
- 下载Android Studio(主要是利用其带的SDK以及CMAKE)
- 下载并安装Python,注意安装过程中需要勾选添加到环境变量,我安装的是Python3.5,可通过命令行键入python检查Python是否已经配置好:
- 下载NDK, 本文使用r14b 64位(https://github.com/assimp/assimp/wiki/Android-compilation-on-Windows-%28Quick-overview%29)
- 下载并解压Assimp-v.5.0.0.rc1
- 在NDK目录下的build/tools下,通过以下命令生成编译时所需要的交叉编译ToolChain,注意:
.make_standalone_toolchain.py --arch=arm --stl=gnustl --api= --install-dir=toolchain--arm-gnustl
- --arch 参数指定不同的架构:arm64-v8a对应arm64,armeabi-v7a对应arm等等。
- --stl指定使用哪种stl,本文使用gnustl
- --api 本文选择了9
- 将生成的toolchain-9-arm-gnustl整个文件夹复制到Assimp-v.5.0.0.rc1的同级目录下。
- 在Assimp-v.5.0.0.rc1的同级目录下,新建一个build_assimp.bat,用于编译生成.so文件,文件内容如下:
. @echo off
. cls
.
. REM *NOTE* Change these based on
. SET ASSIMP_DIR=assimp-v.5.0..rc1
. SET OUTPUT_DIR=aassimp-build-armeabi-v7a
. SET ANDROID_PATH=C:/Users/xxxx/AppData/Local/Android/Sdk
. SET NDK_PATH=G:/software/android-ndk-r16b
. SET NDK_TOOLCHAIN=%~dp0toolchain-9-arm-gnustl. SET CMAKE_TOOLCHAIN=%NDK_PATH%/build/cmake/android.toolchain.cmake
. SET CMAKE_PATH=%ANDROID_PATH%/cmake/3.6.
.
. REM *NOTE* Careful if you don't want rm -rf, I use it for testing purposes.
.
. mkdir %OUTPUT_DIR%
.
. REM pushd doesn't seem to work ):<
. cd %OUTPUT_DIR%
.
. if not defined ORIGPATH set ORIGPATH=%PATH%
. SET PATH=%CMAKE_PATH%\bin;%ANDROID_PATH%\tools;%ANDROID_PATH%\platform-tools;%ORIGPATH%
.
. cmake ^
. -GNinja ^
. -DCMAKE_TOOLCHAIN_FILE=%CMAKE_TOOLCHAIN% ^
. -DASSIMP_ANDROID_JNIIOSYSTEM=ON ^
. -DANDROID_NDK=%NDK_PATH% ^
. -DCMAKE_MAKE_PROGRAM=%CMAKE_PATH%\bin\ninja.exe ^
. -DCMAKE_BUILD_TYPE=Release ^
. -DANDROID_ABI="armeabi-v7a" ^
. -DANDROID_NATIVE_API_LEVEL= ^
. -DANDROID_FORCE_ARM_BUILD=TRUE ^
. -DCMAKE_INSTALL_PREFIX=install ^
. -DANDROID_STL=gnustl_static ^
. -DCMAKE_CXX_FLAGS=-Wno-c++-narrowing ^
. -DANDROID_TOOLCHAIN=clang ^
.
. -DASSIMP_BUILD_TESTS=OFF ^
.
. ../%ASSIMP_DIR%
.
. cmake --build .
.
8.参数解释:
- ASSIMP_DIR是解压的Assimp库所在的文件夹
- OUTPUT_DIR是保存编译生成文件的文件夹
- ANDROID_PATH跟NDK_PATH需要修改为自己机器上的路径
- NDK_TOOLCHAIN是保存工具链的文件夹
- 下面的-DANDROID_ABI和-DANDROID_NATIVE_API_LEVEL参数需要改成所需的值。
- DANDROID_STL=gnustl_static ^ ,需要与之前生成工具链选择的c库一致。
- 然后双击运行.bat文件,如果没有报错,就能在< OUTPUT_DIR>/code/下找到libassimp.so文件,想要生成其他架构下的.so文件,只需修改生成toolchain和.bat文件参数(-DANDROID_ABI="armeabi-v7a" ^ ),再执行即可。
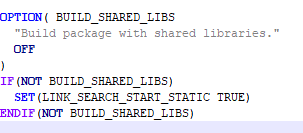
- 如果想生成静态库.a,需要打开assimp/CMakeList.txt,将BUILD_SHARED_LIBS关掉,并增加下面三行,然后重复上面步骤。
Assimp定制化:
assimp功能强大,可以加载和导出多种3D模型,附加多种效果优化功能,但在需求中有很多功能使用不到,所以可以在编译时直接剔除已达到减小静态库的目的,需要注意的是:除了需要在编译时通过宏控制编译之外还需要直接在code/CMakeLists.txt文件中将相应的源码注释掉。【后续详细补充】
Windows环境下编译Assimp库生成Android可用的.so或.a文件的更多相关文章
- 在Ubuntu下编译Assimp库
在Ubuntu下编译Assimp库 怎样在Ubuntu下编译Assimp库?这是我曾经编译成功后做的笔记,供參考. 1.去以下的站点去下载Assimp库: http://assimp.sourcefo ...
- Openstack 二次开发之:在windows 环境下编译Openstack-java-sdk
在windows环境下使用maven对openstack-java-sdk进行编译 编译源文件 下载源代码 git clonehttps://github.com/woorea/openstack-j ...
- 在Windows 环境下编译Qt静态库(QT5.32)
参考链接 Qt5.3 Tools and Versions MinGW ICU ActivePerl Qt 安装MinGW工具链环境 这里在Win32环境下要安装一个MinGW工具链,这里最好是先安装 ...
- 在windows环境下编译hadoop
1.环境准备 1.1 JDK的安装 下载jdk1.6.0_43(这里务必要使用jdk的1.6版本,因为使用JDK1.7版本编译hadoop的时候,很多Maven依赖下载不完整,最终会报错)解压到,并将 ...
- 【Code::Blocks】windows 环境下编译 Code::Blocks(已修正)
Code::Blocks 在2012-11-25发布了最新的12.11版本,相比上一个版本(10.05),Code::Blocks 进行了许多改进和更新(Change log). 引用 Wikiped ...
- 【转】Windows环境下Android NDK环境搭建
原文网址:http://www.metsky.com/archives/525.html 前面介绍Windows下Android 开发环境配置,主要是面向JAVA开发环境,对只做APK上层应用开发人员 ...
- Windows环境下Android NDK环境搭建
前面介绍Windows下Android 开发环境配置,主要是面向JAVA开发环境,对只做APK上层应用开发人员来讲,基本够用了,由于Linux系统的权限限制和Android封装架构限制,很多涉及底层设 ...
- Android 环境下编译FFmpeg
Android 环境下编译FFmpeg 开发环境:Ubuntu 12.04.2 LTS , android-sdk-linux, android-ndk-r8e 一 .X264 编译 1. X2 ...
- Windows环境下使用VS2005编译OpenSSL
如何Windows环境下,使用VS2005编译OpenSSL,虽然这个问题在Baidu.Google上一堆,但安装中还是遇到些问题,在这里 记录下来希望能帮助大家不要在走弯路.注:我是在WinXP S ...
随机推荐
- PLSQL Developer安装与配置
前言 PLSQL Developer软件以及需要的配置 链接:https://pan.baidu.com/s/1xHdAl1RAgtQb-oDHPah19w 密码:x41k 1 安装 解压这两个压缩包 ...
- Unity Technologies-提供全面的技术支持服务
Unity Technologies-提供全面的技术支持服务 在收费服务是由Unity大华区面向研发企业推出的一项技术支持服务,以全中文的方式进行,为研发团队解答在使用Unity引擎过程中遇到的各类问 ...
- Kettle中并行执行测试
整个作业截图: 设置并行方法:右键 START 组件,勾选最后一个选项: Run Next Entries In Parallel 设置aa, bb, cc, dd, ee 都是shell脚本,内容都 ...
- 史上最简单的Docker入门教程
安装Ubuntu Docker 安装 CentOS Docker 安装 Windows Docker 安装 MacOS Docker 安装 这里我的电脑是mac,采用brew安装,安装完毕记得更换国内 ...
- Kafka(二)设计原理
1.持久性 kafka使用文件存储消息,这就直接决定kafka在性能上严重依赖文件系统的本身特性.且无论任何OS下,对文件系统本身的优化几乎没有可能.因为kafka是对日志进行append操作,因此磁 ...
- matplotlib 生成 eps 插入到 tex
matplotlib 生成 eps 插入到 tex matplotlib 生成 eps,就可以插入到 tex 中,而且是矢量图,放大不失真. 而且因为图中的元素都是嵌入到 pdf 中,所以图中的文字也 ...
- 使用window.performance分析web前端性能
参考链接:https://blog.csdn.net/lovenjoe/article/details/80260658
- YOLO v3
yolo为you only look once. 是一个全卷积神经网络(FCN),它有75层卷积层,包含跳跃式传递和降采样,没有池化层,当stide=2时用做降采样. yolo的输出是一个特征映射(f ...
- appniu踩坑
1.pyCharm识别不到appnium-python-client 解决:新建项目注意选择环境,查看Project Interpreter中是否识别到了appnium-python-client 还 ...
- 终于有人把P2P、P2C、O2O、B2C、B2B、C2C 的区别讲透了!
原文地址:https://www.cnblogs.com/sap-ronny/p/8149960.html P2P.P2C .O2O .B2C.B2B. C2C,每天看着这些常见又陌生的名词,如果有人 ...