P2245 星际导航
题目描述
sideman 做好了回到 Gliese星球的硬件准备,但是 sideman 的导航系统还没有完全设计好。为了方便起见,我们可以认为宇宙是一张有 N 个顶点和 M 条边的带权无向图,顶点表示各个星系,两个星系之间有边就表示两个星系之间可以直航,而边权则是航行的危险程度。
sideman 现在想把危险程度降到最小,具体地来说,就是对于若干个询问 (A, B),sideman 想知道从顶点 AA航行到顶点 B 所经过的最危险的边的危险程度值最小可能是多少。作为 sideman 的同学,你们要帮助 sideman返回家园,兼享受安全美妙的宇宙航行。所以这个任务就交给你了。
输入输出格式
输入格式:
第一行包含两个正整数 N 和 M,表示点数和边数。
之后 M 行,每行三个整数 A,B 和 L,表示顶点 A 和 B 之间有一条边长为 L 的边。顶点从 1 开始标号。
下面一行包含一个正整数 Q,表示询问的数目。
之后 Q 行,每行两个整数 A 和 B,表示询问 A 和 B 之间最危险的边危险程度的可能最小值。
输出格式:
对于每个询问, 在单独的一行内输出结果。如果两个顶点之间不可达, 输出 impossible。
输入输出样例
输入样例#1: 复制
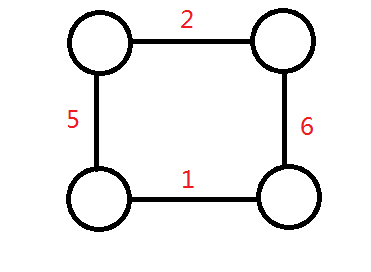
4 5
1 2 5
1 3 2
2 3 11
2 4 6
3 4 4
3
2 3
1 4
1 2
输出样例#1: 复制
5
4
5
说明
对于 40% 的数据,满足 \(N \leq 1000, M \leq 3000, Q \leq 1000\)。
对于 80% 的数据,满足 \(N \leq 10000, M \leq 10^5, Q \leq 1000\)。
对于 100% 的数据,满足 \(N \leq 10^5, M \leq 3 \times 10^5, Q \leq 10^5, L \leq 10^9\)。数据不保证没有重边和自环。
kruskal重构树
在最小生成树时每次合并两个节点时把它们合并到一个新的点上,这个点的权值就是两点间边的权值
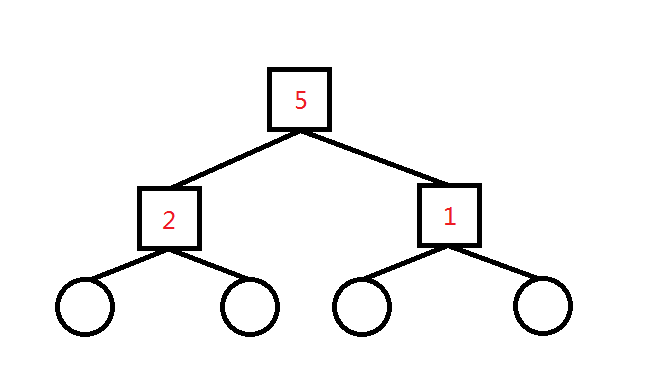
每两个点间的lca就是它们最小路径上的最大值
#include<iostream>
#include<cstdio>
#include<algorithm>
#include<cstring>
#define M 300010
#define LL long long
#define RI register int
#define max(a,b) ((a)>(b)? (a):(b))
#define min(a,b) ((a)<(b)? (a):(b))
using namespace std;
int m,n,j,k,a[M],ver[M],edge[M],head[M],nex[M],cnt,top[M],wson[M],f[M],s[M],d[M],x,y,z,father[M],cn;
struct vv
{
int ver,edge,fr;
} v[M];
inline char gc()
{
static char now[1<<22],*S,*T;
if (T==S)
{
T=(S=now)+fread(now,1,1<<22,stdin);
if (T==S) return EOF;
}
return *S++;
}
inline int gtt()
{
register int x=0,f=1;
register char ch=gc();
while(!isdigit(ch))
{
if (ch=='-') f=-1;
ch=gc();
}
while(isdigit(ch)) x=(x<<1)+(x<<3)+ch-'0',ch=gc();
return x*f;
}
inline void ptt(int a)
{
RI b[100], k=a, g=0;
while(k) b[++g]=k%10, k/=10;
for(g;g;g--) putchar(b[g]+48);
}
inline bool cmp(vv a,vv b){return a.edge<b.edge;}
inline void add(int x,int y)
{
cnt+=1;
ver[cnt]=y; nex[cnt]=head[x]; head[x]=cnt;
}
inline int ff(int x)
{
if(father[x]==x) return x;
father[x]=ff(father[x]);
return father[x];
}
inline void dfs1(int now,int fa)
{
d[now]=d[fa]+1; f[now]=fa; s[now]=1;
for(RI i=head[now];i;i=nex[i])
{
int t=ver[i];
dfs1(t,now);
if(s[t]>s[wson[now]]) wson[now]=t;
s[now]+=s[t];
}
}
inline void dfs2(int now,int topp)
{
top[now]=topp;
if(wson[now]) dfs2(wson[now],topp);
for(RI i=head[now];i;i=nex[i])
{
int t=ver[i];
if(!top[t]) dfs2(t,t);
}
}
inline int lca(int x,int y)
{
while(top[x]!=top[y])
{
if(d[top[x]]<d[top[y]])
{
int z=x;
x=y; y=z;
}
x=f[top[x]];
}
return (d[x]>d[y]?y: x);
}
inline void kru()
{
for(RI i=1;i<=m;i++)
{
int w=ff(v[i].fr), e=ff(v[i].ver);
if(w!=e)
{
cn+=1;
father[w]=father[e]=cn;
add(cn,w);
add(cn,e);
edge[cn]=v[i].edge;
}
}
}
int main()
{
n=gtt(); m=gtt(); cn=n;
for(RI i=1;i<=4*n;i++) father[i]=i;
for(RI i=1;i<=m;i++) {v[i].fr=gtt(); v[i].ver=gtt(); v[i].edge=gtt();}
sort(v+1,v+1+m,cmp);
kru();
dfs1(cn,0);
dfs2(cn,cn);
n=gtt();
for(RI i=1;i<=n;i++)
{
x=gtt(); y=gtt();
if(ff(x)!=ff(y)) puts("impossible");
else ptt(edge[lca(x,y)]), putchar('\n');
}
}
P2245 星际导航的更多相关文章
- 洛谷 P2245 星际导航 解题报告
P2245 星际导航 题目描述 sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为了方便起见,我们可以认为宇宙是一张有N 个顶点和M 条边的带权无向 ...
- 【luogu P2245 星际导航】 题解
题目链接:https://www.luogu.org/problemnew/show/P2245 = 货车运输 被逼着写过mst+lca 后来成了mst+树剖 #include <cstdio& ...
- P2245 星际导航 瓶颈路
\(\color{#0066ff}{ 题目描述 }\) sideman 做好了回到 \(\text{Gliese}\) 星球的硬件准备,但是 \(\text{sideman}\) 的导航系统还没有完全 ...
- [LUOGU] P2245 星际导航
题目描述 sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为了方便起见,我们可以认为宇宙是一张有N 个顶点和M 条边的带权无向图,顶点表示各个星系, ...
- [洛谷P2245]星际导航
题目大意:有一张n点m边的带权无向图,和一些问题,每次询问两个点之间的路径的最大边权最小是多少. 解题思路:同NOIP2013货车运输,只是数据增大,大变成小,小变成大了而已.所以具体思路见货车运输. ...
- 最小生成树+LCA【洛谷 P2245】 星际导航
[洛谷 P2245] 星际导航 题目描述 sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为了方便起见,我们可以认为宇宙是一张有N 个顶点和M 条边 ...
- Luogu 2245 星际导航(最小生成树,最近公共祖先LCA,并查集)
Luogu 2245 星际导航(最小生成树,最近公共祖先LCA,并查集) Description sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为 ...
- 【洛谷P2245】星际导航
题面 题解 \(kruskal\)重构树板子题??(大雾 因为重构树上两点之间的\(LCA\)的权值就是原图上最小生成树上的瓶颈. 所以建个重构树,跑\(LCA\)即可. 代码 #include< ...
- Kruskal+LCA【p2245】 星际导航
Description sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为了方便起见,我们可以认为宇宙是一张有\(N\) 个顶点和\(M\) 条边的 ...
随机推荐
- JVM GC总结
判断对象存活 引用计数算法 给对象中添加一个引用计数器,每当有一个地方引用它时,计数器就加1,引用失效时,计数器就减1:任何时刻计数器都为0的对象就是不可能再被使用的. 问题:无法解决对象之间的相互循 ...
- Java代理(二)
前面说到了java的静态代理,这次来看看动态代理. 假设有如下接口和实现方法: package proxy; public interface Subject { public void reques ...
- 一步一步学Python-基础篇
1.安装 地址:https://www.python.org/downloads/windows/ 安装完成过后,配置环境变量,比如:path后面计入;C:\Python27(可能需要重启一下) 然后 ...
- 微信开发e.target.dataset取值undefined
替换为: e.currentTarget.dataset.current
- 传统javabean与spring中的bean的区别
javabean已经没人用了 springbean可以说是javabean的发展, 但已经完全不是一回事儿了 用处不同:传统javabean更多地作为值传递参数,而spring中的bean用处几乎无处 ...
- margin相关基本知识
什么是 margin ? CSS 边距属性定义元素周围的空间.通过使用单独的属性,可以对上.右.下.左的外边距进行设置.也可以使用简写的外边距属性同时改变所有的外边距.——W3School 边界,元素 ...
- H5新增属性classList
H5新增属性classList h5中新增了一个classList,原生js可以通过它来判断获取dom节点有无某个class. classList是html元素对象的成员,它的使用非常简单,比如 co ...
- jsonp promise封装
npm 安装jsonp import originJSONP from 'jsonp' export default function jsonp(url, data, option){ url += ...
- 【Java】读写文本文件
package rw; import java.io.BufferedReader; import java.io.FileInputStream; import java.io.FileOutput ...
- 探索ORM之iBati(一)
ibatis iBATIS一词来源于“internet”和“abatis”的组合,是一个由Clinton Begin在2001年发起的开放源代码项目.最初侧重于密码软件的开发,现在是一个基于Jav ...