arduino一些内容
arduino 套件使用说明书V1.0.pdf,
步进电机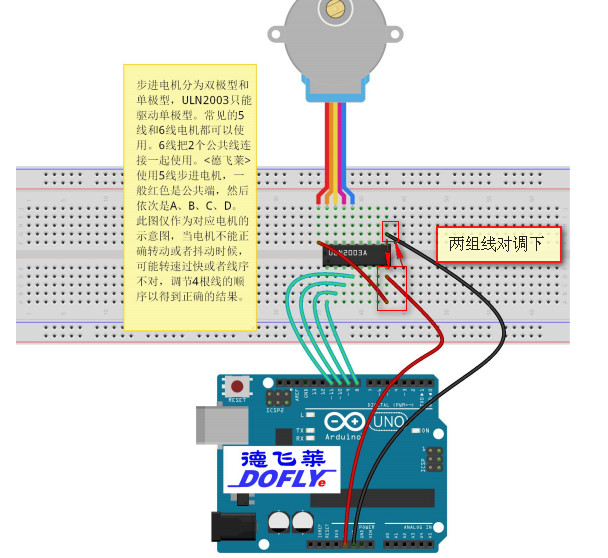
DHT11
传感器另外一脚要接A0
/*
Web client This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield. Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13 created 18 Dec 2009
by David A. Mellis
modified 9 Apr 2012
by Tom Igoe, based on work by Adrian McEwen */ #include <SPI.h>
#include <Ethernet.h> #define DHT11_PIN 1 // Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
// if you don't want to use DNS (and reduce your sketch size)
// use the numeric IP instead of the name for the server:
//IPAddress server(74,125,232,128); // numeric IP for Google (no DNS)
char server[] = "192.168.1.95"; // name address for Google (using DNS) // Set the static IP address to use if the DHCP fails to assign
IPAddress ip(,,,); // Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
EthernetClient client; void uploadData(String c,String h){
// if you get a connection, report back via serial:
if (client.connect(server, )) {
Serial.println("connected");
// Make a HTTP request:
client.println("GET /DHT11Data.ashx?C="+c+"&h="+h+" HTTP/1.1");
client.println("Host:192.168.1.95");
client.println("Connection: close"); client.println();
delay();
// if there are incoming bytes available
// from the server, read them and print them:
while (client.available()) {
char c = client.read();
Serial.print(c);
}
}
else {
// kf you didn't get a connection to the server:
Serial.println("connection failed");
} // if the server's disconnected, stop the client:
if (!client.connected()) {
Serial.println();
Serial.println("disconnecting.");
client.stop(); // do nothing forevermore: }
} byte read_dht11_dat()
{
byte i = ;
byte result = ;
for(i=;i<;i++)
{
while(!(PINC&_BV(DHT11_PIN)));
delayMicroseconds();
if(PINC&_BV(DHT11_PIN))
result|=(<<(-i));
while((PINC&_BV(DHT11_PIN)));
}
return result;
} void setup() { DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
// Open serial communications and wait for port to open:
Serial.begin();
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
} // start the Ethernet connection:
if (Ethernet.begin(mac) == ) {
Serial.println("Failed to configure Ethernet using DHCP");
// no point in carrying on, so do nothing forevermore:
// try to congifure using IP address instead of DHCP:
Ethernet.begin(mac, ip);
}
// give the Ethernet shield a second to initialize:
delay();
Serial.println("Ready"); } void loop()
{
byte dht11_dat[];
byte dht11_in;
byte i;
PORTC &= ~_BV(DHT11_PIN);
delay();
PORTC|=_BV(DHT11_PIN);
delayMicroseconds();
DDRC &= ~_BV(DHT11_PIN);
delayMicroseconds();
dht11_in = PINC & _BV(DHT11_PIN);
if(dht11_in)
{
Serial.println("dht11 start condition 1 not met");
return;
} delayMicroseconds();
dht11_in=PINC & _BV(DHT11_PIN);
if(!dht11_in) {
Serial.println("dht11 start condition 2 not met");
return;
} delayMicroseconds();
for(i=;i<;i++)
dht11_dat[i]=read_dht11_dat();
DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
byte dht11_check_sum = dht11_dat[]+dht11_dat[]+dht11_dat[]+dht11_dat[];
if(dht11_dat[]!=dht11_check_sum)
{
Serial.println("DHT11 checksum error");
} uploadData(String(dht11_dat[]) +"." +String(dht11_dat[]),String(dht11_dat[]) +"." +String(dht11_dat[]) ); Serial.print("Current humdity= ");
Serial.print(String(dht11_dat[]));
Serial.print(".");
Serial.print(dht11_dat[],DEC);
Serial.print("%");
Serial.print("temperature = ");
Serial.print(dht11_dat[],DEC);
Serial.print(".");
Serial.print(dht11_dat[],DEC);
Serial.println("C"); delay();
}
调整PWM频率
源代码如下:Here are some usage examples of the function: // Set pin 9's PWM frequency to 3906 Hz (31250/8 = 3906)
// Note that the base frequency for pins 3, 9, 10, and 11 is 31250 Hz
setPwmFrequency(, ); // Set pin 6's PWM frequency to 62500 Hz (62500/1 = 62500)
// Note that the base frequency for pins 5 and 6 is 62500 Hz
setPwmFrequency(, ); // Set pin 10's PWM frequency to 31 Hz (31250/1024 = 31)
setPwmFrequency(, ); Please keep in mind that changing the PWM frequency changes the Atmega's timers and disrupts the normal operation of many functions that rely on time (delay(), millis(), Servo library). /**
* Divides a given PWM pin frequency by a divisor.
*
* The resulting frequency is equal to the base frequency divided by
* the given divisor:
* - Base frequencies:
* o The base frequency for pins 3, 9, 10, and 11 is 31250 Hz.
* o The base frequency for pins 5 and 6 is 62500 Hz.
* - Divisors:
* o The divisors available on pins 5, 6, 9 and 10 are: 1, 8, 64,
* 256, and 1024.
* o The divisors available on pins 3 and 11 are: 1, 8, 32, 64,
* 128, 256, and 1024.
*
* PWM frequencies are tied together in pairs of pins. If one in a
* pair is changed, the other is also changed to match:
* - Pins 5 and 6 are paired on timer0
* - Pins 9 and 10 are paired on timer1
* - Pins 3 and 11 are paired on timer2
*
* Note that this function will have side effects on anything else
* that uses timers:
* - Changes on pins 3, 5, 6, or 11 may cause the delay() and
* millis() functions to stop working. Other timing-related
* functions may also be affected.
* - Changes on pins 9 or 10 will cause the Servo library to function
* incorrectly.
*
* Thanks to macegr of the Arduino forums for his documentation of the
* PWM frequency divisors. His post can be viewed at:
* http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1235060559/0#4
*/
void setPwmFrequency(int pin, int divisor) {
byte mode;
if(pin == || pin == || pin == || pin == ) {
switch(divisor) {
case : mode = 0x01; break;
case : mode = 0x02; break;
case : mode = 0x03; break;
case : mode = 0x04; break;
case : mode = 0x05; break;
default: return;
}
if(pin == || pin == ) {
TCCR0B = TCCR0B & 0b11111000 | mode;
} else {
TCCR1B = TCCR1B & 0b11111000 | mode;
}
} else if(pin == || pin == ) {
switch(divisor) {
case : mode = 0x01; break;
case : mode = 0x02; break;
case : mode = 0x03; break;
case : mode = 0x04; break;
case : mode = 0x05; break;
case : mode = 0x06; break;
case : mode = 0x7; break;
default: return;
}
TCCR2B = TCCR2B & 0b11111000 | mode;
}
}
关于按钮软件去抖动法
unsigned char btnIsPress=;
const int buttonPin = ; // 按键位置
const int ledPin = ; // led 位置
// 定义变量
int ledState = HIGH; // 当前led 状态
int buttonState=; // 读取的当前按键状态
int lastButtonState = ; // 上次读取的按键状态
// 使用长整型变量
long lastDebounceTime = ; // 上次按键触发时间
long debounceDelay = ; // 去抖时间,根 void setup() {
// put your setup code here, to run once: pinMode(buttonPin, INPUT);
pinMode(ledPin, OUTPUT);
// 初始化led 的状态
digitalWrite(ledPin, ledState);
Serial.begin(); } void loop() {
// put your main code here, to run repeatedly:
// checkResetPress();
checkBtnPress();
} void checkBtnPress(){
int reading = digitalRead(buttonPin); if (reading != lastButtonState) {
lastDebounceTime = millis();
} if ((millis() - lastDebounceTime) > debounceDelay) {
if (reading != buttonState) {
buttonState = reading;
if (buttonState == HIGH) {
ledState = !ledState;
}
}
} digitalWrite(ledPin, ledState);
lastButtonState = reading;
}
void checkResetPress(){
btnIsPress= digitalRead(buttonPin);
Serial.println(btnIsPress);
if(btnIsPress==){
delay();
btnIsPress= digitalRead(buttonPin);
if(btnIsPress==){
delay();
btnIsPress= digitalRead(buttonPin);
if(btnIsPress==){
Serial.println("yes!");
} }
}
}
上面代码中,if (buttonState == HIGH){ledState=!ledState;} 表示只识别脉冲的上升或阶段,因为一次按键相当于一次脉冲,有上升与下降两个边缘,
如果去掉判断,那么没次按钮时,只能发现led闪几下就又恢复原样(按前是灭还是亮)
arduino一些内容的更多相关文章
- arduino中SCoop库的简单应用案例
转载:https://www.csdn.net/gather_27/MtTaggzsMDExMS1ibG9n.html arduino中SCoop库的简单应用案例首先这篇文章来在视频https://v ...
- arduino 中通过寄存器地址访问寄存器内容
void call_func( void (*func)(void)){ (*func)(); } void setup() { // put your setup code here, to run ...
- Arduino 1602液晶屏实验和程序
在Arduino IDE中, 项目->加载库->管理库中搜索LiquidCrystal,然后安装即可 1.接线图 2.引脚图 3.最简单程序 #include <LiquidCrys ...
- Arduino下LCD1602综合探究(上)——1602的两种驱动方式,如何使LCD的控制编程变得更简单
一.前言: LCD ( Liquid Crystal Display 的简称)液晶显示器,已经逐渐替代CRT成为主流的显示设备之一,因此也成为了单片机发烧友绕不过的话题之一:而LCD1602更是很多单 ...
- 基于 Arduino 的 RFID 识别实验
http://www.it165.net/embed/html/201512/3287.html 2015年12月04日(周五) 上午 博士的智能卡实验--RFID识别实验,基于51单片机: 我们的 ...
- 如何编写自己的Arduino库?
一开始写Arduino 的时候很不习惯,没有main函数,因为好多东西都被隐藏了.一直想搞清楚,以便编写自己的库文件.于是研究一下午,下面是一些总结. Arduino工程的初步认识 一.目录规范 当你 ...
- Arduino 极速入门系列–1 点亮 LED
本篇内容为,使用 Arduino 点亮 LED 的做法示范.很简单的一个入门示范.我们让 LED 闪. 本篇使用到的工具和材料 Arduino Mini Pro 1 PCS Mini USB 数据线 ...
- 关于arduino清空串口缓存(转)
在arduino1.0之前的版本 Serial.flush()的作用是是清空串口缓存( dropping received incoming data).但在1.0之后的版本 Serial.flush ...
- NFC:Arduino、Android与PhoneGap近场通信
NFC:Arduino.Android与PhoneGap近场通信(第一本全面讲解NFC应用开发的技术著作移动智能设备近距离通信编程实战入门) [美]Tom Igoe(汤姆.伊戈),Don Colema ...
随机推荐
- UI5-文档-2-开发环境
这一部分将指导您安装.配置和设置SAPUI5开发环境的最常见和推荐用例. 请注意:您可以在不同的平台上使用SAPUI5.各自平台的许可和维护条件也适用于SAPUI5.例如,如果在SAP云平台上使用SA ...
- windows10配置java开发环境
一.下载jdk 二.安装jdk路径,这个路径不能包含中文名 三.系统会提示安装jre,安装目录不要是jdk的安装目录,否则会覆盖掉jdk目录下的jre目录 四. .;%JAVA_HOME%\lib;% ...
- 更新日志(建议升级到2017.1.18a) && 更新程序的方法
更新程序的步骤: 1,在控制面板里点击备份当前数据库文件到磁盘,把当天获取的信息从内存写到磁盘/存储卡.2,下载最新版的源码 wget -O "infopi.zip" " ...
- 抽象类(abstract class)
package com.bjsxt.oop.abstractClass; //抽象类 public abstract class Animal { //因为父类的方法总是被重写 那就没写的必要了 但是 ...
- jremoting的功能扩展点
1 InvokeFilter,实现此接口 可以在consumer端 与provider端的调用过程中拦截住请求调用. 已经实现的InvokeFilter包括 RetryInvokeFilter:实现 ...
- Kconfig详解
当执行#make menuconfig时会出现内核的配置界面,所有配置工具都是通过读取"arch/$(ARCH)Kconfig"文件来生成配置界面,这个文件就是所有配置的总入口,它 ...
- Bioconductor应用领域之基因芯片
引用自https://mp.weixin.qq.com/s?__biz=MzU4NjU4ODQ2MQ==&mid=2247484662&idx=1&sn=194668553f9 ...
- 网页信息抓取 Jsoup的不足之处 httpunit
今天又遇到一个网页数据抓取的任务,给大家分享下. 说道网页信息抓取,相信Jsoup基本是首选的工具,完全的类JQuery操作,让人感觉很舒服.但是,今天我们就要说一说Jsoup的不足. 1.首先我们新 ...
- windows server 2008 远程桌面连接数修改--无限连接
1.开启远程桌面 我的电脑 | 属性 | 远程设置 | 远程 | 进允许运行使用网络级别身份验证的远程桌面的计算机连接(更安全)(N)
- swift UITextfield 添加点击方法 - 简单实现
1. 真正在任何系统上都有效的方法 1./// 城市选择 private lazy var cityTextfield:UITextField = { let tf = UITextField() t ...