SAM4E单片机之旅——15、触屏输入与SPI通信
开发板上配了一个电阻触摸屏,它的控制器是ADS7843,使用SPI进行通信。这次实现的功能是通过SPI接口与该控制器交互,获取触摸屏点击的坐标,并显示在LCD上。略为难点的是SPI作为同步时钟的一种,需要判断时钟的极性以及相位。
为了突出主题,就没有对电阻屏进行校准,显示的是控制器原始的输出值。
一、 电路图
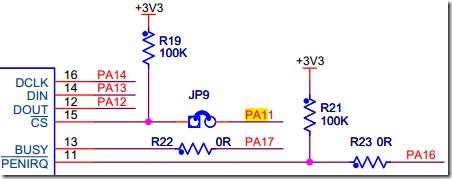
PA12、PA13和PA14引脚的外设A为SPI相关引脚,PA11为SPI的NPCS0。即,该控制器连接在SPI的片选设备0。
二、ADS7843简介
和该控制器交互过程大概如下:
- 根据设置,当控制器检测到有触摸时,PENIRQ引脚会拉低。
- 为获取触摸的位置,需要向控制器发送一个8bit的控制字。
- 控制器完成模数转换后,会拉高BUSY引脚电平。
- 因为SPI主设备在读取从设备的数据时,需要通过发送数据来提供时钟信息,所以需要发送数据给从设备,才能读取数据。
控制字的格式(只说明本次用到的值的含义):

S为起始位:
必须为1。需要发送无效指令时,该位为0。
A[0-2]为通道选择位:
值为1时表示读取坐标Y值;为5时读取坐标X。
MODE为模式选择位:
值为0时表示进行12位转换。
SER/DFR为单端/差分模式选择位:
为低时表示控制器工作在差分模式。
PD[0-1]为休眠模式选择位:
值为0时表示该两次转换之间进行休眠,且在有触摸操作时开启IRQ中断;
值为3时表示不进行休眠,且禁用中断。
通信时序与时钟极性、相位:
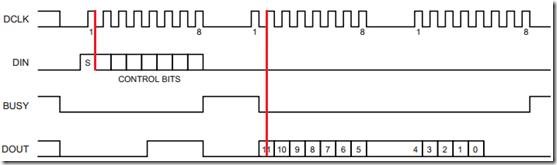
上图是ADS7843,在进行12位转换时,通信的时序图。
可以看到,每次传输的数据为8位。而在时钟无效时,时钟引脚是保持低电平的。并且,在一个时钟周期内,在第一个时钟边沿(即上升沿)时,传输的数据不变,即表示在时钟的第一个边沿进行数据采集;而在时钟第二个边沿(即下降沿)时,数据改变。
接收数据时的注意事项:

单独注意下ADS7843输出时的时序。
在第一次传输的过程中,在第一个时钟的上升沿时,其输出为低电平。而有效的数据在第二个时钟才开始被采集到。这意味着,第一次传输时SPI主机的接收到的数据中,只有低7位是有效的。
同样也可以看到,在第二次传输时,则有5位有效数据被传输。
三、 辅助函数
先实现一些辅助的函数,完成一些子功能。
引脚及常用命令的宏定义。
/* ADS7843 引脚 */
#define RT_BUSY_PIN PIO_PA17
#define RT_IRQ_PIN PIO_PA16
/* ADS7843 命令相关 */
#define RT_CMD_START (1<<7)
#define RT_CMD_SWITCH_SHIFT 4
#define RT_CMD_PD_MOD 0x3 //不休眠且不产生中断
/* ADS7843 常用命令 */
#define RT_CMD_ENABLE_PENIRQ \
((1 << RT_CMD_SWITCH_SHIFT) | RT_CMD_START)
#define RT_CMD_X_POS \
((5 << RT_CMD_SWITCH_SHIFT) | RT_CMD_START| RT_CMD_PD_MOD)
#define RT_CMD_Y_POS \
((1 << RT_CMD_SWITCH_SHIFT) | RT_CMD_START | RT_CMD_PD_MOD)SPI发送数据,并返回接收到的数据。在实际运用中,可能需要进行超时的处理。
uint16_t SPISend(uint16_t data)
{
/* 发送 */
while(!(SPI->SPI_SR & SPI_SR_TDRE));
SPI->SPI_TDR = data;
/* 接收 */
while(!(SPI->SPI_SR & SPI_SR_RDRF));
return (SPI_RDR_RD_Msk & SPI->SPI_RDR);
}向ADS7843发送命令,并取得返回值。
/*这个函数默认发送完命令后,ADS7843会返回两次数据 */
uint32_t RTouchSendCmd(uint8_t uc_cmd)
{
SPISend(uc_cmd);
/* 等待输出 */
while ((PIOA->PIO_PDSR & RT_BUSY_PIN) ==0);
/* 读取数据 */
uint32_t rec_data = SPISend(0);
uint32_t uResult = rec_data << 8;
rec_data = SPISend(0);
uResult |= rec_data;
uResult >>= 3; return uResult;
}
四、 初始化
GPIO引脚复用配置。将PA11—PA14复用为外设A,PA16和PA17配置为输入引脚。
// 代码略……
SPI设置。下面直接给我设置的代码,如此设置的原因已经在上一小节说明。对于波特率的选择,ADS7843的芯片手册中只要求了一个在时钟脉冲中,高电平和低电平的出现时间不少于200ns。在这里选择的波特率为1 MHz(MCK为96 MHz)
/* PMC */
PMC->PMC_PCER0 = (1 << ID_SPI); const uint32_t RT_SPI_CS = 0; // 片选设备0
SPI->SPI_MR = SPI_MR_MSTR // Master 模式
| SPI_MR_MODFDIS // 关闭模式检测
| SPI_MR_PCS(~(1<<RT_SPI_CS)) // 外设选择
| (SPI_MR_PS & 0) // 选择固定外设
; SPI->SPI_CSR[RT_SPI_CS] =
SPI_CSR_BITS_8_BIT // 每次传输8比特数据
| (SPI_CSR_CPOL & 0) // 时钟无效时为低电平
| SPI_CSR_NCPHA // 在时钟的首边沿进行数据采集
| SPI_CSR_CSAAT // 传输完成后保持片选
| SPI_CSR_SCBR(96) // 波特率为对MCK进行96分频
; SPI->SPI_CR = SPI_CR_SPIEN; // 使能SPI使能ADS7843中断
RTouchSendCmd(RT_CMD_ENABLE_PENIRQ);
五、 具体功能实现
需要实现的功能在有触摸输入时,将ADS7843的输出绘制在LCD上。有了前面的基础,而且功能不复杂,所以实现起来也较为简单,直接看代码即可。
#include <stdio.h> int pos_x, pos_y;
char print_buf[64];
const ili93xx_color_t bg_color = COLOR_WHITE;
const ili93xx_color_t fg_color = COLOR_BLACK;
ili93xx_fill(bg_color); while (1)
{
/* 判断是否有触摸输入 */
if ((PIOA->PIO_PDSR & RT_IRQ_PIN) == 0)
{
/* 获取坐标 */
pos_x = RTouchSendCmd(RT_CMD_X_POS);
pos_y = RTouchSendCmd(RT_CMD_Y_POS);
/* 清屏 */
ili93xx_fill(bg_color);
/* 将坐标绘制在屏幕上 */
ili93xx_set_foreground_color(fg_color);
sprintf(print_buf, "X: %x", pos_x);
ili93xx_draw_string(100,100, print_buf);
sprintf(print_buf, "Y: %x", pos_y);
ili93xx_draw_string(100,150, print_buf);
/* 等待 */
for (volatile int i = 0; i < 500000; ++i)
;
/* 在获取输入坐标时停用了中断,需要重新启用*/
RTouchSendCmd(RT_CMD_ENABLE_PENIRQ);
}
}
SAM4E单片机之旅——15、触屏输入与SPI通信的更多相关文章
- cefsharp + winform 内嵌网页的触屏输入焦点问题
原文 现象 我正在使用 cefsharp + winform 建立一个桌面程序用于显示网页.但程序启动后触屏点击网页中的输入框,使用键盘输入,文字输入不进去.win + D 最小化程序后,再恢复窗口才 ...
- SAM4E单片机之旅——18、通过AFEC(ADC)获取输入的电压
很多时候,一个电压不仅仅需要定性(高电平或者低电平),而且要定量(了解具体电压的数值).这个时候就可以用到模数转换器(ADC)了.这次的内容是测量开发板搭载的滑动变阻器(VR1)的电压,然后把ADC转 ...
- SAM4E单片机之旅——24、使用DSP库求向量数量积
DSP(Digital Signal Processing,数字信号处理)中会使用大量的数学运算.Cortex-M4中,配置了一些强大的部件,以提高DSP能力.同时CMSIS提供了一个DSP库,提供了 ...
- SAM4E单片机之旅——23、在AS6(GCC)中使用FPU
浮点单元(Floating Point Unit,FPU),是用于处理浮点数运算的单元. 为使用FPU,除了需要启用FPU外,还需要对编译器进行设置,以使其针对浮点运算生成特殊的指令.虽然在Atmel ...
- SAM4E单片机之旅——22、GMAC和PHY的介绍与初始化
网络通信的作用不用多说,而这次进行的工作即是对以太网通信过程中,需要用到的硬件部分进行初始化,也介绍了发送和接收数据的方法. 由于较为复杂,所以使用了ASF框架.但是也会对用到的库函数的实现做一个介绍 ...
- SAM4E单片机之旅——17、通过UART进行标准IO
交互还是很有必要的,而且使用键盘和显示器的交互效率还是很高的.当然,可以直接使用UART进行字符的输入和输出.但是又何必浪费了C的标准输入输出的格式控制之类的功能呢? 这次内容就是使用scanf() ...
- SAM4E单片机之旅——16、NAND Flash读写
这次大概介绍了一下NAND Flash,以及在ASF中使用它的方法. 一. 接线 这个开发板搭载了一个256 MB,8位的NAND Flash(MT29F2G08ABAEA).引脚接线如下: 偷个懒, ...
- SAM4E单片机之旅——14、LCD之SMC的配置
在上个例子中,已经在ASF添加了ILI93xx模块,并做好了相关的声明.这次就做好SMC的配置,然后使用ASF提供的API在屏幕上打印出”Hello World!”字样. 一. 电路图 开发板的LCD ...
- SAM4E单片机之旅——13、LCD之ASF初步
在Atmel Studio 6中,集成了Atmel Software Framework(ASF框架).通过它提供的库,可以很快速地完成新的项目. 这次的最终目标使用ASF在LCD上显示出文字“Hel ...
随机推荐
- Linux网络管理
关于OSI七层模型.TCP五层模型.TCP的三次握手.HTTP协议.DNS解析等相关的网络基础知识请参考我整理的一篇博客:http://www.cnblogs.com/wxisme/p/4699049 ...
- 开源一个基于nio的java网络程序
因为最近要从公司离职,害怕用nio写的网络程序没有人能看懂(或许是因为写的不好吧),就调整成了mina(这样大家接触起来非常方便,即使没有socket基础,用起来也不难),所以之前基于nio写的网络程 ...
- xss-跨站脚本攻击-后台传给前端的html标签安全显示
作用 后台拼接的html字符串传到前端,默认是不安全的,需要告诉前端这个字符串是安全的,可以正常显示html标签. 知识点 1.定义 2 3 <script> 获取session ...
- node生成自定义命令(yargs/commander)
第一部分可以生成一个自定义命令,例如常见的”express”,yargs和commander则可以在生成的自定义命令上做扩展,yargs将命令扩展成类似express --l xx的形式;而comma ...
- 轻松解决MYSQL数据库连接过多的错误
1.数据库系统允许的最大可连接数max_connections.这个参数是可以设置的.如果不设置,默认是100.最大是16384. 2.数据库当前的连接线程数threads_connected.这是动 ...
- display:inline-block兼容ie6/7的写法
2.display:inline-block作用? 使用display:inline-block属性,可以使行内元素或块元素能够变成行内块元素,简单直白点讲就是不加float属性就可以定义自身的宽.高 ...
- C# 发邮件
using System;using System.Collections.Generic;using System.ComponentModel;using System.Data;using Sy ...
- yii2.0 图片上传(摘录)
文章来源:http://blog.sina.com.cn/s/blog_88a65c1b0101izmn.html 下面小伙就带领大学学习一下 Yii2.0 的图片上传类的使用,还是老样子,如果代码样 ...
- Unsupervised Classification - Sprawl Classification Algorithm
Idea Points (data) in same cluster are near each others, or are connected by each others. So: For a ...
- ningx配置ModSecurity重启出现兼容性问题:ModSecurity: Loaded PCRE do not match with compiled!的解决方法
nginx开启错误日志,然后重启nginx,出现如下信息: 2016/12/03 09:40:38 [notice] 18858#0: ModSecurity for nginx (STABLE)/2 ...