Android 12(S) 图像显示系统 - drm_hwcomposer 简析(上)
必读:
Android 12(S) 图像显示系统 - 开篇
前言
Android源码中有包含drm_hwcomposer:/external/drm_hwcomposer/
drm_hwcomposer 这个过程下的代码架构变化还是很频繁的,我这里分析直接去 drm_hwcomposer 的官方地址抓取最新的code来做分析了
解析
这个工程编译后会产生 shared library :/vendor/lib/hw/hwcomposer.drm.so
drm_hwcomposer作为一个HAL module,其写作实现还是遵循了旧有的Android HAL Module的接口实现规则。
看看一些结构体的定义以及他们之间的关系:
结构体hw_device_t的定义
[/hardware/libhardware/include/hardware/hardware.h]
typedef struct hw_device_t {
tag; /** tag must be initialized to HARDWARE_DEVICE_TAG */
uint32_t version;
struct hw_module_t* module;
uint64_t reserved[12];
int (*close)(struct hw_device_t* device);
} hw_device_t;结构体hwc2_device_t的定义
[/hardware/libhardware/include/hardware/hwcomposer2.h]
typedef struct hwc2_device {
/* Must be the first member of this struct, since a pointer to this struct
* will be generated by casting from a hw_device_t* */
struct hw_device_t common;
void (*getCapabilities)(struct hwc2_device* device, uint32_t* outCount,
int32_t* /*hwc2_capability_t*/ outCapabilities);
hwc2_function_pointer_t (*getFunction)(struct hwc2_device* device,
int32_t /*hwc2_function_descriptor_t*/ descriptor);
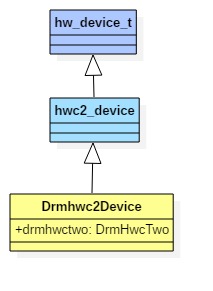
} hwc2_device_t;结构体DrmHwc2Device的定义
[drm-hwcomposer/hwc2_device/hwc2_device.cpp]
struct Drmhwc2Device : hwc2_device {
DrmHwcTwo drmhwctwo;
};按照结构体定义的理解,我们可以认为三个类型,具有如下继承关系
本文作者@二的次方 2022-07-05 发布于博客园
看一个关键的static方法 HookDevOpen,该方法中会去实例化一个Drmhwc2Device对象,其中去创建了一个DrmHwcTwo对象
[drm-hwcomposer/hwc2_device/hwc2_device.cpp]
static int HookDevOpen(const struct hw_module_t *module, const char *name,
struct hw_device_t **dev) {
...
auto ctx = std::make_unique<Drmhwc2Device>();
if (!ctx) {
ALOGE("Failed to allocate DrmHwcTwo");
return -ENOMEM;
}
ctx->common.tag = HARDWARE_DEVICE_TAG;
ctx->common.version = HWC_DEVICE_API_VERSION_2_0;
ctx->common.close = HookDevClose;
// NOLINTNEXTLINE(cppcoreguidelines-pro-type-cstyle-cast)
ctx->common.module = (hw_module_t *)module;
ctx->getCapabilities = HookDevGetCapabilities;
ctx->getFunction = HookDevGetFunction;
*dev = &ctx.release()->common;
return 0;
}在HWC HAL Service启动时,初始化阶段openDeviceWithAdapter中去调用了open函数,就是call到了HookDevOpen可以参见:
/hardware/interfaces/graphics/composer/2.1/utils/passthrough/include/composer-passthrough/2.1/HwcLoader.h
DrmHwcTwo构造时做了什么工作?
[drm-hwcomposer/hwc2_device/DrmHwcTwo.cpp]
DrmHwcTwo::DrmHwcTwo() : resource_manager_(this){}; // DrmHwcTwo的构造函数定义
[drm-hwcomposer/hwc2_device/DrmHwcTwo.h]
ResourceManager resource_manager_; // DrmHwcTwo类中的成员很简单,就是去实例化一个ResourceManager对象,其构造函数中处理初始化了uevent_listener等成员,也没啥了
frontend_interface_指向DrmHwcTwo对象
[drm-hwcomposer/drm/ResourceManager.cpp]
ResourceManager::ResourceManager(
PipelineToFrontendBindingInterface *p2f_bind_interface)
: frontend_interface_(p2f_bind_interface) {
if (uevent_listener_.Init() != 0) {
ALOGE("Can't initialize event listener");
}
}到这里,我大概可以看到ResourceManager是个非常重要的核心类,他应该管理着DRM的资源。
他的定义中也定义了void Init();函数,那这个初始化函数是什么时候调用的呢?
在这篇博文中:Android 12(S) 图像显示系统 - SurfaceFlinger的启动和消息队列处理机制(四)
讲解SurfaceFlinger的初始化过程时,设置callback给HWC,层层传递后就会调用到DrmHwcTwo::RegisterCallback
进而调用到了 resource_manager_.Init();
ResourceManager 初始化到底初始化了什么呢?
本文作者@二的次方 2022-07-05 发布于博客园
[drm-hwcomposer/drm/ResourceManager.cpp]
void ResourceManager::Init() {
if (initialized_) {
ALOGE("Already initialized"); // 已经初始化了,避免重复初始化
return;
}
char path_pattern[PROPERTY_VALUE_MAX];
// Could be a valid path or it can have at the end of it the wildcard %
// which means that it will try open all devices until an error is met.
int path_len = property_get("vendor.hwc.drm.device", path_pattern,
"/dev/dri/card%");
if (path_pattern[path_len - 1] != '%') {
AddDrmDevice(std::string(path_pattern));
} else {
path_pattern[path_len - 1] = '\0';
for (int idx = 0;; ++idx) {
std::ostringstream path;
path << path_pattern << idx;
struct stat buf {};
if (stat(path.str().c_str(), &buf) != 0)
break;
if (DrmDevice::IsKMSDev(path.str().c_str())) {
AddDrmDevice(path.str());
}
}
}
/**上面一大坨代码,简单理解就是找到DRM的设备节点,然后打开它,在我的设备上是/dev/dri/card0 */
/** AddDrmDevice中去初始化DRM各种各样的资源 **/
char scale_with_gpu[PROPERTY_VALUE_MAX];
property_get("vendor.hwc.drm.scale_with_gpu", scale_with_gpu, "0");
scale_with_gpu_ = bool(strncmp(scale_with_gpu, "0", 1));// 使用GPU缩放的标志
if (BufferInfoGetter::GetInstance() == nullptr) {
ALOGE("Failed to initialize BufferInfoGetter");
// 初始化BufferInfoGetter,用于从Gralloc Mapper中获取buffer的属性信息
return;
}
uevent_listener_.RegisterHotplugHandler([this] {// 注册热插拔的回调
const std::lock_guard<std::mutex> lock(GetMainLock());
UpdateFrontendDisplays();
});
UpdateFrontendDisplays();//这里会Send Hotplug Event To Client,SF会收到一次onComposerHalHotplug
// attached_pipelines_的初始化、更新
initialized_ = true; // 设置标记,表明已经初始化过了
}重点看几个函数
AddDrmDevice
[drm-hwcomposer/drm/ResourceManager.cpp]
int ResourceManager::AddDrmDevice(const std::string &path) {
auto drm = std::make_unique<DrmDevice>();// 创建DrmDevice对象
int ret = drm->Init(path.c_str());//初始化DrmDevice,path一般就是/dev/dri/card0
drms_.push_back(std::move(drm));// 保存到drms_这个vector中
return ret;
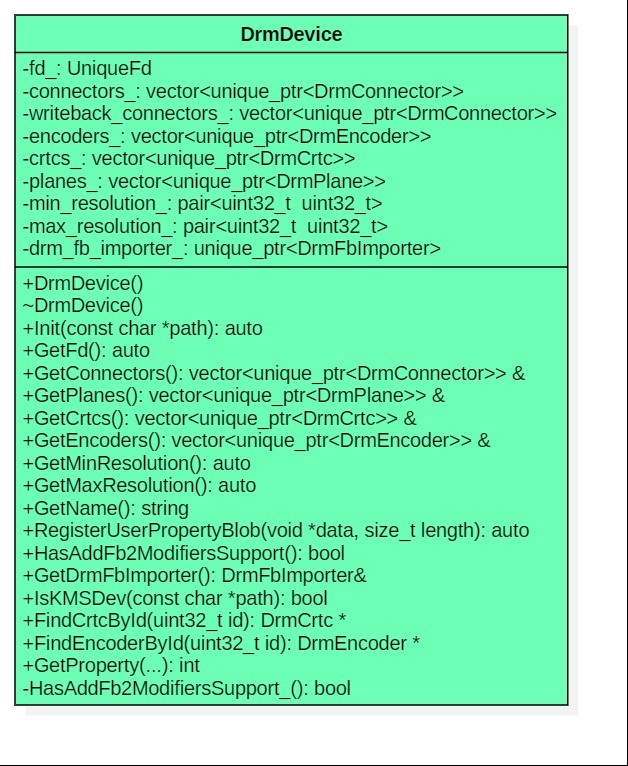
}一个重要的角色登场:DrmDevice,如下其定义
DrmDevice的构造函数中创建一个 DrmFbImporter 对象
[drm-hwcomposer/drm/DrmDevice.cpp]
DrmDevice::DrmDevice() {
drm_fb_importer_ = std::make_unique<DrmFbImporter>(*this);
}DrmDevice::Init
完成了获取DRM资源的初始化,CRTC、Encoder、Connector、Plane这些资源都获取到了
[drm-hwcomposer/drm/DrmDevice.cpp]
auto DrmDevice::Init(const char *path) -> int {
/* TODO: Use drmOpenControl here instead */
fd_ = UniqueFd(open(path, O_RDWR | O_CLOEXEC)); //打开设备,一般是/dev/dri/card0
if (!fd_) {
// NOLINTNEXTLINE(concurrency-mt-unsafe): Fixme
ALOGE("Failed to open dri %s: %s", path, strerror(errno));//打开失败,返回错误
return -ENODEV;
}
// 设置DRM_CLIENT_CAP_UNIVERSAL_PLANES,获取所有支持的Plane资源
int ret = drmSetClientCap(GetFd(), DRM_CLIENT_CAP_UNIVERSAL_PLANES, 1);
if (ret != 0) {
ALOGE("Failed to set universal plane cap %d", ret);
return ret;
}
// 设置DRM_CLIENT_CAP_ATOMIC,告知DRM驱动该应用程序支持Atomic操作
ret = drmSetClientCap(GetFd(), DRM_CLIENT_CAP_ATOMIC, 1);
if (ret != 0) {
ALOGE("Failed to set atomic cap %d", ret);
return ret;
}
// 设置开启 writeback
#ifdef DRM_CLIENT_CAP_WRITEBACK_CONNECTORS
ret = drmSetClientCap(GetFd(), DRM_CLIENT_CAP_WRITEBACK_CONNECTORS, 1);
if (ret != 0) {
ALOGI("Failed to set writeback cap %d", ret);
}
#endif
uint64_t cap_value = 0;
if (drmGetCap(GetFd(), DRM_CAP_ADDFB2_MODIFIERS, &cap_value) != 0) {
ALOGW("drmGetCap failed. Fallback to no modifier support.");
cap_value = 0;
}
HasAddFb2ModifiersSupport_ = cap_value != 0;//是否支持Add Fb2 Modifiers
// 设置master mode
drmSetMaster(GetFd());
if (drmIsMaster(GetFd()) == 0) {
ALOGE("DRM/KMS master access required");
return -EACCES;
}
// 获取 drmModeRes
auto res = MakeDrmModeResUnique(GetFd());
if (!res) {
ALOGE("Failed to get DrmDevice resources");
return -ENODEV;
}
// 最小和最大的分辨率
min_resolution_ = std::pair<uint32_t, uint32_t>(res->min_width,
res->min_height);
max_resolution_ = std::pair<uint32_t, uint32_t>(res->max_width,
res->max_height);
// 获取所有的CRTC,创建DrmCrtc对象,并加入crtcs_这个vector<unique_ptr<DrmCrtc>>
for (int i = 0; i < res->count_crtcs; ++i) {
// NOLINTNEXTLINE(cppcoreguidelines-pro-bounds-pointer-arithmetic)
auto crtc = DrmCrtc::CreateInstance(*this, res->crtcs[i], i);
if (crtc) {
crtcs_.emplace_back(std::move(crtc));
}
}
// 获取所有的Encoder,创建DrmEncoder对象,并加入encoders_这个vector<unique_ptr<DrmEncoder>>
for (int i = 0; i < res->count_encoders; ++i) {
// NOLINTNEXTLINE(cppcoreguidelines-pro-bounds-pointer-arithmetic)
auto enc = DrmEncoder::CreateInstance(*this, res->encoders[i], i);
if (enc) {
encoders_.emplace_back(std::move(enc));
}
}
// 获取所有的Connector,创建DrmConnector对象,并加入connectors_这个vector<unique_ptr<DrmConnector>>
// 或放入writeback_connectors_这个vector中
for (int i = 0; i < res->count_connectors; ++i) {
// NOLINTNEXTLINE(cppcoreguidelines-pro-bounds-pointer-arithmetic)
auto conn = DrmConnector::CreateInstance(*this, res->connectors[i], i);
if (!conn) {
continue;
}
// wirteback如何理解?
if (conn->IsWriteback()) {
writeback_connectors_.emplace_back(std::move(conn));
} else {
connectors_.emplace_back(std::move(conn));
}
}
// 获取drmModePlaneRes
auto plane_res = MakeDrmModePlaneResUnique(GetFd());
if (!plane_res) {
ALOGE("Failed to get plane resources");
return -ENOENT;
}
// 获取所有的Plane,创建DrmPlane对象,并加入planes_这个vector<unique_ptr<DrmPlane>>
for (uint32_t i = 0; i < plane_res->count_planes; ++i) {
// NOLINTNEXTLINE(cppcoreguidelines-pro-bounds-pointer-arithmetic)
auto plane = DrmPlane::CreateInstance(*this, plane_res->planes[i]);
if (plane) {
planes_.emplace_back(std::move(plane));
}
}
return 0;
}回到ResourceManager::Init()中,最后调用了一次UpdateFrontendDisplays()
[drm-hwcomposer/drm/ResourceManager.cpp]
void ResourceManager::UpdateFrontendDisplays() {
// internal displays放前面,external放后面的排序connectors
auto ordered_connectors = GetOrderedConnectors();
for (auto *conn : ordered_connectors) {
conn->UpdateModes();
bool connected = conn->IsConnected();
bool attached = attached_pipelines_.count(conn) != 0; // 判断map中是否存在key为conn的元素
if (connected != attached) {
ALOGI("%s connector %s", connected ? "Attaching" : "Detaching",
conn->GetName().c_str());
if (connected) {// connected==true and attached == false,绑定资源
auto pipeline = DrmDisplayPipeline::CreatePipeline(*conn);
if (pipeline) {
//frontend_interface_指向DrmHwcTwo对象
frontend_interface_->BindDisplay(pipeline.get());
attached_pipelines_[conn] = std::move(pipeline);//存入map
}
} else { // connected==false and attached == true,解绑资源
auto &pipeline = attached_pipelines_[conn];
frontend_interface_->UnbindDisplay(pipeline.get());
attached_pipelines_.erase(conn);// map中删除
}
}
}
frontend_interface_->FinalizeDisplayBinding();
}DrmHwcTwo中的两个成员:
[drm-hwcomposer/hwc2_device/DrmHwcTwo.h]
std::map<hwc2_display_t, std::unique_ptr<HwcDisplay>> displays_;
std::map<DrmDisplayPipeline *, hwc2_display_t> display_handles_;出现了三个函数:
DrmHwcTwo::BindDisplay
主要是创建HwcDisplay,
DrmHwcTwo::UnbindDisplay
删除HwcDisplay
DrmHwcTwo::FinalizeDisplayBinding
完成显示绑定,大概看是Creating null-display for headless mode , send hotplug events to the client,displays_for_removal_list_
本文作者@二的次方 2022-07-05 发布于博客园
重点看一看创建HwcDisplay和SetPipeline做了啥子吧
HwcDisplay的构造函数很简单,就是初始化一些成员
[drm-hwcomposer/hwc2_device/HwcDisplay.cpp]
HwcDisplay::HwcDisplay(hwc2_display_t handle, HWC2::DisplayType type,
DrmHwcTwo *hwc2)
: hwc2_(hwc2), // 关联的DrmHwcTwo对象
handle_(handle), // typedef uint64_t hwc2_display_t; handle本质就是一个uint64_t整数值
type_(type), // Physical 物理屏幕
color_transform_hint_(HAL_COLOR_TRANSFORM_IDENTITY) {
// clang-format off
color_transform_matrix_ = {1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0};
// clang-format on
}HwcDisplay::SetPipeline
[drm-hwcomposer/hwc2_device/HwcDisplay.cpp]
void HwcDisplay::SetPipeline(DrmDisplayPipeline *pipeline) {
Deinit();
pipeline_ = pipeline;
if (pipeline != nullptr || handle_ == kPrimaryDisplay) {
Init(); // 初始化
hwc2_->ScheduleHotplugEvent(handle_, /*connected = */ true);
} else {
hwc2_->ScheduleHotplugEvent(handle_, /*connected = */ false);
}
}再看HwcDisplay::Init
[drm-hwcomposer/hwc2_device/HwcDisplay.cpp]
HWC2::Error HwcDisplay::Init() {
ChosePreferredConfig(); //选择一个最佳的config,然后SetActiveConfig
// VSYNC相关的代码省略不看
if (!IsInHeadlessMode()) {//设置后端 backend
ret = BackendManager::GetInstance().SetBackendForDisplay(this);
if (ret) {
ALOGE("Failed to set backend for d=%d %d\n", int(handle_), ret);
return HWC2::Error::BadDisplay;
}
}
client_layer_.SetLayerBlendMode(HWC2_BLEND_MODE_PREMULTIPLIED);
return HWC2::Error::None;
}又出现了新的名词: Backend
谁是 front end ? 谁是back end ? 扮演的角色功能分别是什么?
初步看起来貌似是:
front end 对外提供调用的接口,外部使用者呼叫 front end 暴漏出的接口来呼叫某一功能;
back end 内部的实现逻辑,是前端接口功能的内部实现,是真正做事的地方;
本文作者@二的次方 2022-07-05 发布于博客园
HwcDisplay类中有成员 == HwcLayer client_layer_,有个疑问 这个client layer 是如何与SF中的GPU合成的图层关联起来的?
他是一个特例,特殊的专门的的layer,转用于处理显示 CLIENT -- GPU 合成的 buffer, SetClientTarget传递buffer数据给他

小结
以上内容,主要讲述分析的是开机阶段,DRM HWC的初始化的一些流程。大概就是获取DRM的资源,创建并初始化必要模块。
Android 12(S) 图像显示系统 - drm_hwcomposer 简析(上)的更多相关文章
- Android 12(S) 图像显示系统 - drm_hwcomposer 简析(下)
必读: Android 12(S) 图像显示系统 - 开篇 合成方式 合成类型的定义:/hardware/interfaces/graphics/composer/2.1/IComposerClien ...
- Android 12(S) 图像显示系统 - GraphicBuffer同步机制 - Fence
必读: Android 12(S) 图像显示系统 - 开篇 一.前言 前面的文章中讲解Android BufferQueue的机制时,有遇到过Fence,但没有具体讲解.这篇文章,就针对Fence这种 ...
- Android 12(S) 图像显示系统 - 基础知识之 BitTube
必读: Android 12(S) 图像显示系统 - 开篇 一.基本概念 在Android显示子系统中,我们会看到有使用BitTube来进行跨进程数据传递.BitTube的实现很简洁,就是一对&quo ...
- Android 12(S) 图像显示系统 - SurfaceFlinger之VSync-上篇(十六)
必读: Android 12(S) 图像显示系统 - 开篇 一.前言 为了提高Android系统的UI交互速度和操作的流畅度,在Android 4.1中,引入了Project Butter,即&quo ...
- Android 12(S) 图像显示系统 - SurfaceFlinger 之 VSync - 中篇(十七)
必读: Android 12(S) 图像显示系统 - 开篇 1 前言 这一篇文章,将继续讲解有关VSync的知识,前一篇文章 Android 12(S) 图像显示系统 - SurfaceFlinger ...
- Android 12(S) 图像显示系统 - SurfaceFlinger GPU合成/CLIENT合成方式 - 随笔1
必读: Android 12(S) 图像显示系统 - 开篇 一.前言 SurfaceFlinger中的图层选择GPU合成(CLIENT合成方式)时,会把待合成的图层Layers通过renderengi ...
- Android 12(S) 图像显示系统 - HWC HAL 初始化与调用流程
必读: Android 12(S) 图像显示系统 - 开篇 接口定义 源码位置:/hardware/interfaces/graphics/composer/ 在源码目录下可以看到4个版本的HIDL ...
- Android 11(R) Power HAL AIDL简析 -- 基本接口
Android 11(R) Power HAL AIDL将分三篇文章来介绍: Android 11(R) Power HAL AIDL简析 -- 基本接口 Android 11(R) Power HA ...
- Android 12(S) 图形显示系统 - createSurface的流程(五)
题外话 刚刚开始着笔写作这篇文章时,正好看电视在采访一位92岁的考古学家,在他的日记中有这样一句话,写在这里与君共勉"不要等待幸运的降临,要去努力的掌握知识".如此朴实的一句话,此 ...
随机推荐
- C++中 指针的指针是什么?指针的引用又是什么?你可能需要看看这篇文章
关于变量的定义 我们都知道变量的定义包括一个基本数据类型(base type)和一组声明符,在同一条定义语句中,输入基本数据类型不同,但是声明符的形式却可以不同. //如:i是一个int的整数,a是一 ...
- 1.1 Qt Creater使用Python开发桌面软件的操作流程
Qt Creater及Python的下载与安装过程不再赘述,读者可自行在网上搜索相应的下载与安装方法. 首先我们打开Qt Creater,单击"Create Project"按钮或 ...
- 数据结构_C语言_二叉树先序、中序、后序遍历
# include <stdio.h> # include <stdlib.h> typedef struct BiTreeNode { char data; struct B ...
- 《计算机组成原理/CSAPP》网课总结(一)
现在是2022年4月17日晚10点,本月计划的网课<csapp讲解>视频课看到了第八章"异常"第三讲,视频讲的很好但更新很慢,暂时没有最新的讲解,所以先做一个简单总结. ...
- 『现学现忘』Git基础 — 23、Git中的撤销操作
目录 1.撤销操作说明 2.撤销工作区中文件的修改 3.撤销暂存区中文件的修改 4.总结 1.撤销操作说明 我们在使用Git版本管理时,往往需要撤销某些操作.比如说我们想将某个修改后的文件撤销到上一个 ...
- 小数据池,is和==的区别,id()
小数据池 概念 存放数据缓存的地方 目的 节省内存,提高效率 什么数据会被缓存(什么数据会放在小数据池中) 数字 字符串 布尔 优点: 可以帮我们快速的创建对象.节省内存. 缺点: ...
- django的下载安装,目录结构的介绍,简单的django应用
1.django的下载安装 pip3 install django==1.11.9 2.django的创建 1.在windows的cmd窗口下 1.1创建django项目 django-admin s ...
- crontab和cron表达式详解
引言 我们在定时任务中经常能接触到cron表达式,但是在写cron表达式的时候我们会遇到各种各样版本的cron表达式,比如我遇到过5位.6位甚至7位的cron表达式,导致我一度搞混这些表达式.更严重的 ...
- JS运算符,流程控制,函数,内置对象,BOM与DOM
运算符 1.算数运算符 运算符 描述 + 加 - 减 * 乘 / 除 % 取余(保留整数) ++ 递加 - - 递减 ** 幂 var x=10; var res1=x++; '先赋值后自增1' 10 ...
- 解决 youtube 片尾内容被遮挡
参考: https://www.pcdvd.com.tw/showthread.php?t=1137333 在 ublock 的自定义静态规则中加上这句话 www.youtube.com##.ytp- ...