【系列】关于NJUPT电赛自控方向第一次积分赛的总结
本人是NJUPT电子科学与技术专业大一摸鱼狗一枚。本博客旨在总结与分享个人准备电赛所学知识,同时也是为了防止遗忘,锻炼写文章的能力。目前电赛方向为自控方向。主要研究方向为单片机、图像处理、自动控制相关,往后会有数学建模等知识更新~
本系列讲解2022年南京邮电大学电子设计竞赛(自控组)第一次积分赛试题,分享我所在小组的比赛思路与过程。
本文先写下前言,试试水~后续有多篇文章更新(如果有空的话)~
话不多说,先上原题:
2022年南京邮电大学电子设计竞赛(自控组)第一次积分赛试题
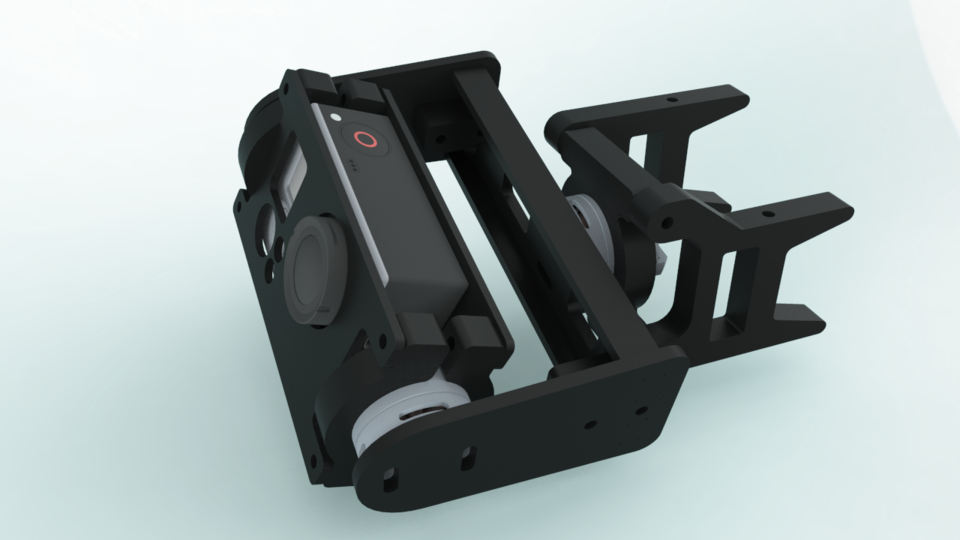
A题:自适应姿态云台装置
一、任务
设计并制作一个能够自适应姿态变化的稳定云台装置。该装置能够感应单轴姿态发生的实时变化,并通过自动控制模块,能够提供抵消外界姿态变化提供稳定功能,安装在稳定器上的相机画面保持不变。示意图如下(仅做示意,不要求如此外观)。
二、要求
1、基本要求
(1)电机能够进行PID位置控制(选测3个典型位置:最大,最小,中间值)。(20分)
(2)电机能够进行PID速度控制(选测3个典型速度)。(20分)
(3)单片机实时读取姿态变化。(10分)
(4)根据外界姿态的变化,实时控制电机保持特定姿态保持不变。(10分)
2、发挥部分
在基本要求的前提下,能够有电位器调节云台转动,使得相机画面保持稳定变化(40分)
三、说明
1.结构自行设计,没有统一要求。
2.单片机、姿态传感器、电机等材料型号不做限制要求。
B题:目标识别与控制装置
一、 任务
设计并制作一个能够发现典型目标形态的装置,并根据目标的中心位置偏移,通过串口输出发送控制指令。
二、要求
1、基本要求
(1)能够识别颜色:四种识别案例,自选,例如红黄蓝绿,并自定义一种输出用于验证,例如串口/显示屏。(30分)
(2)能够识别形状,四种识别案例,自选,例如圆、直线、三角形、正方形,并自定义一种输出用于验证,例如串口/显示屏。(20分)
(3)能够对MAVLINK通信协议移植或者自定义一种无人机/小车主控兼容的通信协议,用于标识目标的中心位置。(10分)
(4)根据中心位置的变化,能够计算发送运动指令,让目标在画面正中心(手持摄像头运动示意小车/无人机的运动)。(10分)
2、发挥部分
在基本要求的前提下,能够有实物小车/无人机验证(40分)
三、说明
板卡、摄像头等材料型号不做限制要求。
由于我们队没有树莓派,openmv,k210等,而且买的话又要花点时间上手(积分赛大约two weeks),更何况我们没有现成小车与飞行器(突然感觉我们好穷:-)),故选A题。最终目标全部达成,就是因为PID没有调好,导致云台不太稳定。。。扣了点分。。。但PID参数是我们调了好久的最佳数据了→_→。后面的文章还会讲PID整定方法与实际过程。
敲重点!!!
我们的思路如下:
(1)电机PWM控制
(2)电机速度检测
(3)电机角度检测
(4)电机PID速度控制
(5)电机PID位置控制
(6)MPU6050数据获取(IIC + DMP)
(7)单片机ADC采样
(8)与上位机或串口屏串口通信
后面的文章将详解以上思路与工程实操。
(持续更新中~)
【文章列表】
(暂时啥也没有)
【系列】关于NJUPT电赛自控方向第一次积分赛的总结的更多相关文章
- hdu5017:补题系列之西安网络赛1011
补题系列之西安网络赛1011 题目大意:给定一个椭球: 求它到原点的最短距离. 思路: 对于一个椭球的标准方程 x^2/a^2 + y^2/b^2 +z^2/c^2=1 来说,它到原点的最短距离即为m ...
- TI MSP430工程配置及2019年电赛A题编程示例(使用430 F5529)
配置 第一步:右击工程,选择Options 第二步:在General Options的Target选项卡里选择对应的器件Device,这里是MSP430G2231 第三步:在Debugger里选择FE ...
- ACM集训第一次积分赛赛前复习+day4
不知不觉4天过去了,我们迎来了我们第一次积分赛,赛前的四天我们学了以下知识点吧: day 1.排序 之前一直想用qsort,但是总是写不明白,STL的sort()可以说是很方便了. 先写一个最基础的数 ...
- 电赛总结(四)——波形发生芯片总结之AD9854
一.特性参数 ·300M内部时钟频率 ·可进行频移键控(FSK),二元相移键控(BPSK),相移键控(PSK),脉冲调频(CHIRP),振幅调制(AM)操作 ·正交的双通道12位D/A转换器 ·超高速 ...
- 电赛总结(四)——波形发生芯片总结之AD9834
一.特性参数 1.2.3V~5.5V供电 2.输出频率高达37.5MHz 3.正弦波.三角波输出 4.提供相位调制和频率调制功能 5.除非另有说明,VDD = 2.3 V至5.5 V,AGND = D ...
- ACM 五一杭电赛码"BestCoder"杯中国大学生程序设计冠军赛小记
对于这项曾经热爱的竞赛,不得不说这是我最后一年参加ACM比赛了,所以要珍惜每一次比赛的机会. 五一去杭电参加了赛码"BestCoder"杯中国大学生程序设计冠军赛,去的队伍包括了今 ...
- 电赛总结(二)——AD芯片总结之音频处理芯片ADC8009
一.特性参数 1.专门用来用音频处理的AD芯片 2.内部固定好8K的采样速率 3.8位AD芯片 二.内部结构图 三.芯片管脚图 四.管脚功能说明 管脚名称 功能 IN0~IN7 数据输入端 ABC 数 ...
- 电赛总结(二)——AD芯片总结之AD7715
一.特性参数 1.16位无失真AD转换器 2.增益可调,在1,2,32,128可切换. 3.数字地和模拟地分开,可以减少噪声. 4.具有较大的输出电流,有比较好的带载能力. 二.管脚排列 三.引脚功能 ...
- 电赛总结(二)——AD芯片总结之AD7705
1.特性参数 (1)16位无丢失代码性AD转化器 (2)只需要3.3V供电(即只需要单片机即可供电) (3)双通道差分输入 (4)基准电压为2.5V时,在单极性信号下,输入范围是0到2.5V,在双极性 ...
随机推荐
- 论文翻译:2022_PACDNN: A phase-aware composite deep neural network for speech enhancement
论文地址:PACDNN:一种用于语音增强的相位感知复合深度神经网络 引用格式:Hasannezhad M,Yu H,Zhu W P,et al. PACDNN: A phase-aware compo ...
- logger模块和re模块总结
很多程序都有记录日志的需求,并且日志中包含的信息即有正常的程序访问日志,还可能有错误.警告等信息输出,python的logging模块提供了标准的日志接口,你可以通过它存储各种格式的日志,loggin ...
- 07.python语法入门--流程控制
分支结构 什么是分支结构 为什么要用分支结构 如何使用分支结构 if语法 if应用案例 循环结构 什么是循环结构 为什么要用循环结构 如何使用循环结构 while循环语法 while循环应用案例 fo ...
- Solution -「ZJOI 2019」「洛谷 P5326」开关
\(\mathcal{Description}\) Link. 有 \(n\) 个开关,初始时所有开关的状态为 \(0\).给定开关的目标状态 \(s_1,s_2,\cdots,s_n\).每 ...
- suse 12 二进制部署 Kubernetets 1.19.7 - 番外篇 - 增加node节点
文章目录 0.前景提要 1.准备node节点环境 1.0.修改配置脚本参数 1.1.配置免密 1.2.添加hosts解析 1.3.修改主机名 1.4.更新PATH变量 1.5.安装依赖包 1.6.关闭 ...
- Windows查看本机SSH公钥,生成公钥
#Windows查看本机**SSH**公钥,生成公钥<br>--- ### 1.查看 ssh 公钥方法: 1. 打开你的 git bash 窗口 2. 进入 .ssh 目录:cd ~/.s ...
- vue methods中的函数调用时带括号与不带括号的区别
@click='getList(id)',但是为什么有时候明明没有传参的需要,却要加上()呢? 百思不得其解,于是去查阅了相关的资料,意思就是,当不加括号直接调用这个函数是可以直接获取到这个事件对象的 ...
- 认识并学会使用spring boot
1,什么是SpringBoot SpringBoot是Spring项目中的一个子工程,与我们所熟知的Spring-framework 同属于spring的产品,用一些固定的方式来构建生产级别的spri ...
- [LeetCode]1342. 将数字变成 0 的操作次数
给你一个非负整数 num ,请你返回将它变成 0 所需要的步数. 如果当前数字是偶数,你需要把它除以 2 :否则,减去 1 . 示例 1: 输入:num = 14 输出:6 解释: 步骤 1) 14 ...
- ctf平台
CTF靶场 蓝鲸安全:http://whalectf.xin bugku:https://ctf.bugku.com XCTF攻防世界:https://adworld.xctf.org.cn/ i春秋 ...