ROS kinetic语音识别
1.安装依赖
1.1安装ros-kinetic-audio-common
sudo apt-get install ros-kinetic-audio-common
1.2 安装libasound2
sudo apt-get install libasound2
1.3 安装libgstreamer0.10
sudo apt-get install gstreamer0.10-*
1.4安装python-gst0.10
sudo apt-get install python-gst0.10
2.安装 libsphinxbase1
下载地址:https://packages.debian.org/jessie/libsphinxbase1
sudo dpkg -i libsphinxbase1_0.8-6_amd64.deb
3. 安装libpocketsphinx1
下载地址:https://packages.debian.org/jessie/libpocketsphinx1
sudo dpkg -i libpocketsphinx1_0.8-5_amd64.deb
4.安装gstreamer0.10-pocketsphinx
下载地址:https://packages.debian.org/jessie/gstreamer0.10-pocketsphinx
sudo dpkg -i gstreamer0.10-pocketsphinx_0.8-5_amd64.deb
5.安装pocketsphinx
5.1进入工作空间,git源码
cd ~/dev/catkin_ws/src
git clone https://github.com/mikeferguson/pocketsphinx
5.2下载英文语音包pocketsphinx-hmm-en-tidigits (0.8-5)
下载的网站:https://packages.debian.org/jessie/pocketsphinx-hmm-en-tidigits
sudo dpkg -i pocketsphinx-hmm-en-tidigits_0.-5_all.deb
会加压安装到/usr/share/目录如下所示
/usr/share/doc/pocketsphinx-hmm-en-tidigits/changelog.Debian.gz
/usr/share/doc/pocketsphinx-hmm-en-tidigits/changelog.gz
/usr/share/doc/pocketsphinx-hmm-en-tidigits/copyright
/usr/share/pocketsphinx/model/hmm/en/tidigits/feat.params
/usr/share/pocketsphinx/model/hmm/en/tidigits/mdef
/usr/share/pocketsphinx/model/hmm/en/tidigits/means
/usr/share/pocketsphinx/model/hmm/en/tidigits/sendump
/usr/share/pocketsphinx/model/hmm/en/tidigits/transition_matrices
/usr/share/pocketsphinx/model/hmm/en/tidigits/variances
/usr/share/pocketsphinx/model/lm/en/tidigits.DMP
/usr/share/pocketsphinx/model/lm/en/tidigits.dic
/usr/share/pocketsphinx/model/lm/en/tidigits.fsg
在包pocketsphinx下面建一个model目录,存放语音模型文件
cd ~/dev/catkin_ws/src/pocketsphinx
mkdir model
将下载好的语音文件,解压后,将其中的model文件下的所有文件拷贝到~/dev/catkin_ws/src/pocketsphinx/model下,也可以不复制。
6 启动pocketsphinx测试
直接运行pocketsphinx启动脚本命令“roslaunch pocketsphinx robocup.launch”会出现如下错误,
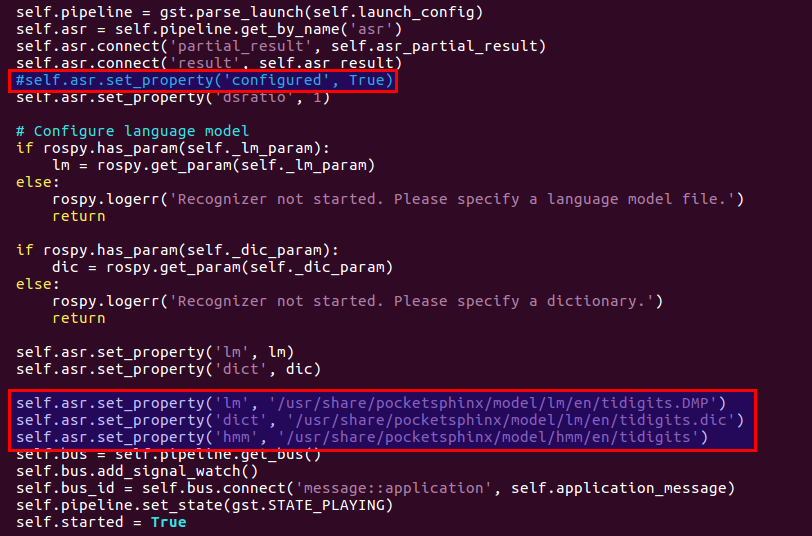
为此,首先我对recognizer.py的做了如下修改:
1)注释掉self.asr.set_property('configured', True)
2)添加lm,dict,hmm支持英语识别(如果是其他语言(如普通话)可以改为别的路径)
self.asr.set_property('lm', '/usr/share/pocketsphinx/model/lm/en/tidigits.DMP')
self.asr.set_property('dict', '/usr/share/pocketsphinx/model/lm/en/tidigits.dic')
self.asr.set_property('hmm', '/usr/share/pocketsphinx/model/hmm/en/tidigits')
这些安装好之后,可以开始测试pocketsphinx的语音识别功能了:
1.终端运行launch启动文件:
roslaunch pocketsphinx robocup.launch
2.尝试说一些简单的语句,(如果使用英文库,说一些数字;如果使用普通话库讲中文),查看识别结果
3.用rostopic echo进行查看识别的输出,即ROS发布的结果消息)
rostopic echo /recognizer/output
7.也可以下载其他包进行测试
中文普通话
pocketsphinx-hmm-zh-tdt https://packages.debian.org/jessie/pocketsphinx-hmm-zh-tdt
pocketsphinx-lm-zh-hans-gigatdt https://packages.debian.org/jessie/pocketsphinx-lm-zh-hans-gigatdt
后期考虑在launch文件中设置参数,在recognizer.py加载参数的读取
参考:http://blog.csdn.net/x_r_su/article/details/53022746?locationNum=1&fps=1
http://www.ncnynl.com/archives/201701/1220.html
ROS kinetic语音识别的更多相关文章
- ROS Kinetic 使用PocketSphinx进行语音识别报错
已解决,重启电脑,装环境把声卡驱动那些似乎死机了 ROS Kinetic 使用PocketSphinx进行语音识别教程 https://www.ncnynl.com/archives/201701/ ...
- ros kinetic安装rbx1
1.首先安装一些依赖包 sudo apt-get install ros-kinetic-turtlebot-bringup \ ros-kinetic-turtlebot-create ros-ki ...
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明 内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装 ---- 祝ROS爱好者和开发者新年快乐:-) ---- ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ros Kinetic 配置 OpenCV2和CV_bridge (Python, C++)
本篇介绍如何在Ros-kinetic环境下运用opencv2进行开发的配置,系统平台为64位Ubuntu16.04. 需要系统环境: 1.Ros kinetic版本,一般自带cv_bridge, 若没 ...
- Ubuntu 16.04 使用docker资料汇总与应用docker安装caffe并使用Classifier(ros kinetic+usb_cam+caffe)
Docker是开源的应用容器引擎.若想简单了解一下,可以参考百度百科词条Docker.好像只支持64位系统. Docker官网:https://www.docker.com/ Docker - 从入门 ...
- 在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示
在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示 智能车无人驾驶技术是目前人工智能和机器人技术的研究热点,有许多开源平台可以使我们零基础零成本入门无人驾驶技术.本文分享一下目前ROS官 ...
随机推荐
- elasticsearch5.5.3 源码学习 idea下源码编译
1.学习elasticsearch 源码,通过搜索“elasticsearch源码”,进行相关搜索. 2.因源码gradle编译,选择gradle-3.5可以编译通过,对应elasticsearc ...
- 动态规划——Best Time to Buy and Sell Stock III
题意:用一个数组表示股票每天的价格,数组的第i个数表示股票在第i天的价格. 如果最多进行两次交易,但必须在买进一只股票前清空手中的股票,求最大的收益. 示例 1:Input: [3,3,5,0,0,3 ...
- XVIII Open Cup named after E.V. Pankratiev. Grand Prix of SPb
A. Base $i - 1$ Notation 两个性质: $2=1100$ $122=0$ 利用这两条性质实现高精度加法即可. 时间复杂度$O(n)$. #include<stdio.h&g ...
- [HDU4864]Task (贪心)
此图和上一篇博客的图一起看有奇效 题意 https://vjudge.net/problem/HDU-4864 思路 贪心 代码 by lyd 我实在是敲不来 #include <iostrea ...
- 分类器、logistic回归
相关性 1.相关性是一种测度,用来表示两个变量在同一方向上发生变化的程度,如果x和y在变化方向上相同,那么这两个变量就是正相关:如果变化方向相反,就是负相关:如果变量之间没有关系,那么相关性就是0. ...
- (73)Wangdao.com第十二天_JavaScript consol 对象与控制台
consol 对象 console对象是 JavaScript 的原生对象 它有点像 Unix 系统的标准输出stdout和标准错误stderr, 可以输出各种信息到控制台,并且还提供了很多有用的辅助 ...
- Java课程课后作业190309之连续最大子数组
老师在课堂是提出了这个问题,并且提出了时间复杂度是O(n)的要求,一开始我自己思想简单,在逻辑上出现了十分粗心的错误,后来同学们也在课堂上比较激烈地讨论了一番,也只是将时间复杂度降到了O(n*n),在 ...
- Linux命令 df du
df: 列出文件系统的整体磁盘使用量 du: 评估文件系统的磁盘使用量 $ df [-ahikHTm] [目录或文件名] 参数: -a: 列出所有的文件系统,包括系统特有的/proc 等文件系统 -k ...
- 一篇搞懂python文件读写操作(r/r+/rb/w/w+/wb/a/a+/ab)
关于文件操作的几种常用方式,网上已有很多解说,内容很丰富,但也因此有些杂乱复杂.今天,我就以我个人的学习经验写一篇详细又易懂的总结文章,希望大家看完之后会有所收获. 一.核心功能 ‘r’ ...
- 屏蔽登录QQ后总是弹出的QQ网吧页面
不知道从什么时候开始的,每次登录QQ的时候,有个叫qq网吧的页面都会弹出来,腾讯你是撒吗?这个公司真是死性不改.按照它的提示,已经设置了好几次这是我家,这特么不是网吧,然并卵.你说它技术不行吧,它堪称 ...