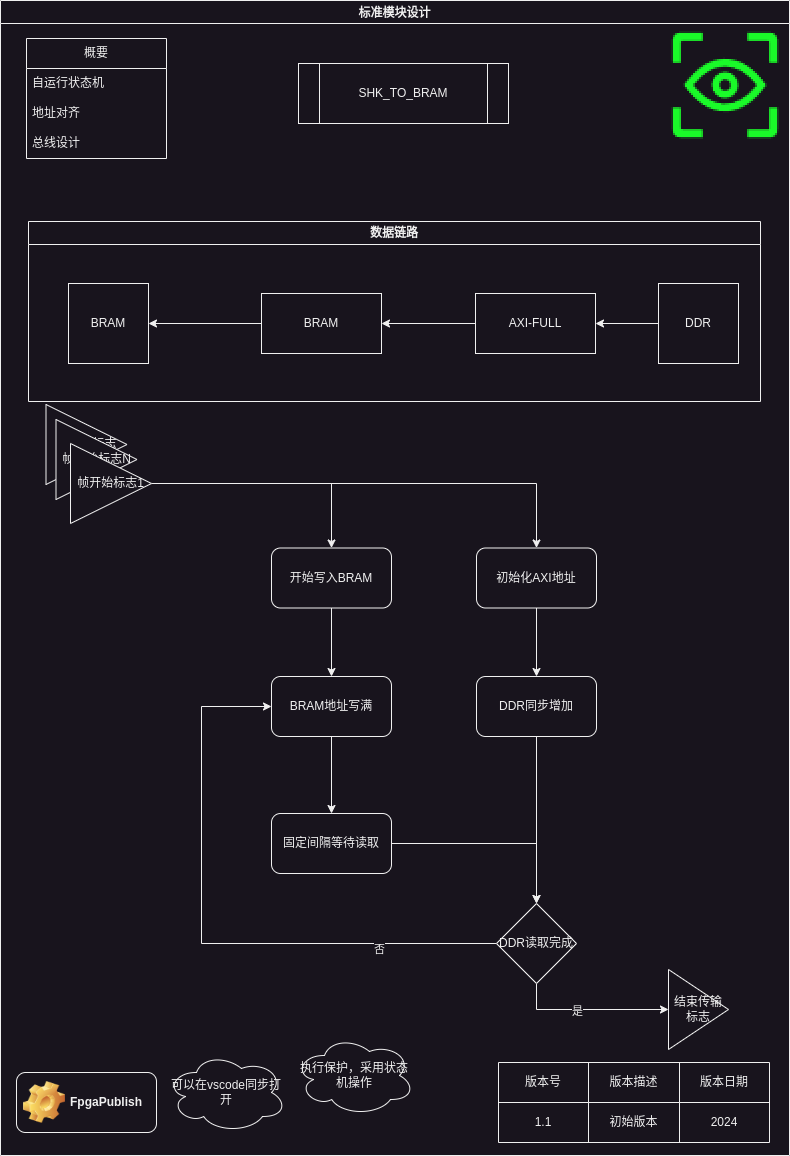
shk_to_bram
Entity: shk_to_bram
- File: shk_to_bram.v
Diagram

Description
Company: FpgaPublish
Engineer: FP
Create Date: 2024/01/12 21:19:05
Revision 0.01 - File Created
Revision 0.02 - add exception info solve

Generics
| Generic name | Type | Value | Description |
|---|---|---|---|
| MD_SIM_ABLE | 0 | mode in sim mode enable | |
| WD_FRAME_START | 3 | width of frame start | |
| NB_START_ADDR0 | 32'h0000_0000 | ddr start addr 0 | |
| NB_START_ADDR1 | 32'h0010_0000 | ddr start addr 1 | |
| NB_START_ADDR2 | 32'h0020_0000 | ddr start addr 2 | |
| NB_START_ADDR3 | 32'h0020_0000 | ddr start addr 2 | |
| NB_START_ADDR4 | 32'h0020_0000 | ddr start addr 2 | |
| NB_START_ADDR5 | 32'h0020_0000 | ddr start addr 2 | |
| NB_START_ADDR6 | 32'h0020_0000 | ddr start addr 2 | |
| NB_START_ADDR7 | 32'h0020_0000 | ddr start addr 2 | |
| NB_FRAME_ALLS | 720 | ddr read all times | |
| WD_SHK0_DATA | 32 | width of shake data | |
| WD_SHK0_ADDR | 32 | width of shake address | |
| NB_SHK0_ONCE | 2048 | ddr read addr once | |
| NB_WR_DELAY | 1000 | write data delay | |
| WD_BRAM_DAT | 32 | width of bram data | |
| WD_BRAM_ADR | 9 | width of bram address | |
| WD_BRAM_WEN | 1 | width of bram write en | |
| WD_ERR_INFO | 4 | width of error info |
Ports
| Port name | Direction | Type | Description |
|---|---|---|---|
| i_sys_clk | input | in system clock | |
| i_sys_resetn | input | in system reset_n | |
| i_frame_start_trig | input | [WD_FRAME_START-1:0] | frame start |
| o_bram_full_trig | output | bram write full | |
| m_err_shk_info1 | output | [WD_ERR_INFO-1:0] | [0]frame start in not IDLE state [1]frame start signal format [2]frame once write more than request |
| bram_master | out | Virtual bus | --bram write |
| shake_master | out | Virtual bus | --read DDR |
Virtual Buses
bram_master
| Port name | Direction | Type | Description |
|---|---|---|---|
| m_bram_wr_addr | output | [WD_BRAM_ADR-1:0] | bram address |
| m_bram_wr_clk | output | bram clock | |
| m_bram_wr_din | output | [WD_BRAM_DAT-1:0] | bram data in |
| m_bram_wr_dout | input | [WD_BRAM_DAT-1:0] | bram data out |
| m_bram_wr_en | output | bram enable | |
| m_bram_wr_rst | output | bram reset high | |
| m_bram_wr_we | output | [WD_BRAM_WEN-1:0] | bram write enable |
shake_master
| Port name | Direction | Type | Description |
|---|---|---|---|
| m_shk0_hp_valid | output | ||
| m_shk0_hp_msync | output | master data synchronize | |
| m_shk0_hp_mdata | output | [WD_SHK0_DATA-1:0] | master data value |
| m_shk0_hp_maddr | output | [WD_SHK0_ADDR-1:0] | master address value |
| m_shk0_hp_ready | input | slaver ready shake | |
| m_shk0_hp_ssync | input | slaver data synchronize | |
| m_shk0_hp_sdata | input | [WD_SHK0_DATA-1:0] | slaver data value |
| m_shk0_hp_saddr | input | [WD_SHK0_ADDR-1:0] | slaver address value |
Signals
| Name | Type | Description |
|---|---|---|
| r_frame_start_chose = 0 | reg [WD_FRAME_START-1:0] | frame start chose |
| w_frame_start_addr = 0 | wire [WD_SHK0_DATA-1:0] | frame start address |
| r_bram_full_trig = 0 | reg | frame bram full trig |
| r_bram_wr_addr = 0 | reg [WD_BRAM_ADR-1:0] | bram address |
| r_bram_wr_clk = 0 | reg | bram clock |
| r_bram_wr_dout_d1 = 0 | reg [WD_BRAM_DAT-1:0] | bram data in temp one clock |
| r_bram_wr_din = 0 | reg [WD_BRAM_DAT-1:0] | bram data out |
| r_bram_wr_en = 0 | reg | bram enable |
| r_bram_wr_rst = 0 | reg | bram reset high |
| r_bram_wr_we = 0 | reg [WD_BRAM_WEN-1:0] | bram write enable |
| r_shk0_hp_valid = 0 | reg | master valid shake |
| r_shk0_hp_msync = 0 | reg | master data synchronize |
| r_shk0_hp_mdata = 0 | reg [WD_SHK0_DATA-1:0] | master data value |
| r_shk0_hp_maddr = 0 | reg [WD_SHK0_ADDR-1:0] | master address value |
| r_wr_delay_cnt = 0 | reg [WD_WR_DELAY-1:0] | delay count |
| cstate = IDLE | reg [3:0] | current state |
| r_err_shk_info1 = 0 | reg [WD_ERR_INFO-1:0] | error info |
Constants
| Name | Type | Value | Description |
|---|---|---|---|
| WD_WR_DELAY | (NB_WR_DELAY) | width of NB_WR_DELAY | |
| WD_SHK0_BYTE | WD_SHK0_DATA / 8 | shake data bytes | |
| NB_BRAM_ONC | NB_SHK0_ONCE / WD_SHK0_BYTE | numb of bram once write | |
| IDLE | 0 | state idle | |
| START | 1 | start read ddr | |
| SHK_REQ | 6 | update addr of DDR | |
| SHK_WR | 2 | shake write data to bram | |
| DELAY | 3 | delay wait | |
| SWITCH | 4 | chose if continue | |
| OVER | 5 | object over |
Functions
- LOG2 (input integer N) return (integer)
- calculate LOG2 convert INT by abandon fractional part
Processes
- unnamed: ( @(posedge i_sys_clk) )
- Type: always
- Description
frame info
- unnamed: ( @(posedge i_sys_clk) )
- Type: always
- Description
bram interface
- unnamed: ( @(posedge i_sys_clk) )
- Type: always
- Description
shk hp interface
- unnamed: ( @(posedge i_sys_clk) )
- Type: always
- Description
delay count
State machines
- current state

/*
code
*/
// *******************************************************************************
//!Company: FpgaPublish
//!
//!Engineer: FP
//!
//!Create Date: 2024/01/12 21:19:05
//!
// Design Name:
// Module Name: shk_to_bram
// Project Name:
// Target Devices: ZYNQ7010 | XCZU2CG | Kintex7
// Tool Versions: 2021.1 || 2022.2
// Description:
// *
// Dependencies:
// *
// Revision: 0.01
//!----------------------------
//!Revision 0.01 - File Created
//!
//!Revision 0.02 - add exception info solve
//!
// Additional Comments:
//
// *******************************************************************************
`timescale 1ns / 1ps
//! { signal: [
//! { name: "clk", wave: "P..............." },
//! { name: "bus", wave: "x.==.=.....x.=x.", data: ["start", "wait", "valid", "over"] },
//! { name: "valid", wave: "0.10............" },
//! { name: "mdata", wave: "0....3.....0....",data:["data_wr"] },
//! { name: "maddr", wave: "0.4..0..........",data:["addr-req"] },
//! { name: "msync", wave: "0....1.....0...." },
//! { name: "ready", wave: "0............10." },
//! { name: "sdata", wave: "0...3......0....",data:["data_rd"] },
//! { name: "saddr", wave: "0...........4.0.",data:["addr-bck"] },
//! { name: "ssync", wave: "0...1......0...." },
//! ],
//! head:{
//! text:'user shk interface',
//! tick:0,
//! every:2
//! }}
module shk_to_bram #(
//sim mode
parameter MD_SIM_ABLE = 0,//!mode in sim mode enable
//frame start
parameter WD_FRAME_START = 3, //!width of frame start
parameter NB_START_ADDR0 = 32'h0000_0000, //! ddr start addr 0
parameter NB_START_ADDR1 = 32'h0010_0000, //! ddr start addr 1
parameter NB_START_ADDR2 = 32'h0020_0000, //! ddr start addr 2
parameter NB_START_ADDR3 = 32'h0020_0000, //! ddr start addr 2
parameter NB_START_ADDR4 = 32'h0020_0000, //! ddr start addr 2
parameter NB_START_ADDR5 = 32'h0020_0000, //! ddr start addr 2
parameter NB_START_ADDR6 = 32'h0020_0000, //! ddr start addr 2
parameter NB_START_ADDR7 = 32'h0020_0000, //! ddr start addr 2
parameter NB_FRAME_ALLS = 720 , //! ddr read all times
//shake bus
parameter WD_SHK0_DATA = 32, //! width of shake data
parameter WD_SHK0_ADDR = 32, //! width of shake address
parameter NB_SHK0_ONCE = 2048, //! ddr read addr once
//time delay
parameter NB_WR_DELAY = 1000, //! write data delay
//bram bus
parameter WD_BRAM_DAT = 32, //! width of bram data
parameter WD_BRAM_ADR = 9 , //! width of bram address
parameter WD_BRAM_WEN = 1 , //! width of bram write en
//error info
parameter WD_ERR_INFO = 4 //!width of error info
)(
//system signals
input i_sys_clk , //!in system clock
input i_sys_resetn, //!in system reset_n
//frame start
input [WD_FRAME_START-1:0] i_frame_start_trig, //!frame start
output o_bram_full_trig , //!bram write full
//! @virtualbus bram_master @dir out --bram write
output [WD_BRAM_ADR-1:0] m_bram_wr_addr, //! bram address
output m_bram_wr_clk , //! bram clock
output [WD_BRAM_DAT-1:0] m_bram_wr_din , //! bram data in
input [WD_BRAM_DAT-1:0] m_bram_wr_dout, //! bram data out
output m_bram_wr_en , //! bram enable
output m_bram_wr_rst , //! bram reset high
output [WD_BRAM_WEN-1:0] m_bram_wr_we , //! bram write enable
//! @end
//! @virtualbus shake_master @dir out --read DDR
output m_shk0_hp_valid,//! master valid shake
output m_shk0_hp_msync,//! master data synchronize
output [WD_SHK0_DATA-1:0] m_shk0_hp_mdata,//! master data value
output [WD_SHK0_ADDR-1:0] m_shk0_hp_maddr,//! master address value
input m_shk0_hp_ready,//! slaver ready shake
input m_shk0_hp_ssync,//! slaver data synchronize
input [WD_SHK0_DATA-1:0] m_shk0_hp_sdata,//! slaver data value
input [WD_SHK0_ADDR-1:0] m_shk0_hp_saddr,//! slaver address value
//! @end
//![0]frame start in not IDLE state
//![1]frame start signal format
//![2]frame once write more than request
output [WD_ERR_INFO-1:0] m_err_shk_info1
);
//========================================================
//function to math and logic
//!calculate LOG2 convert INT by abandon fractional part
function automatic integer LOG2(input integer N);
begin
N = N - 1;
for(LOG2 = 0; N > 0; LOG2 = LOG2 + 1)
begin
N = N >> 1;
end
end
endfunction
//========================================================
//localparam to converation and calculate
localparam WD_WR_DELAY = LOG2(NB_WR_DELAY); //!width of NB_WR_DELAY
localparam WD_SHK0_BYTE = WD_SHK0_DATA / 8; //!shake data bytes
localparam NB_BRAM_ONC = NB_SHK0_ONCE / WD_SHK0_BYTE;//! numb of bram once write
//========================================================
//register and wire to time sequence and combine
// ----------------------------------------------------------
//! frame info
reg [WD_FRAME_START-1:0] r_frame_start_chose = 0; //!frame start chose
wire [WD_SHK0_DATA-1:0] w_frame_start_addr = 0; //!frame start address
reg r_bram_full_trig = 0; //!frame bram full trig
assign o_bram_full_trig = r_bram_full_trig;
// ----------------------------------------------------------
//! bram interface
reg [WD_BRAM_ADR-1:0] r_bram_wr_addr = 0; //! bram address
reg r_bram_wr_clk = 0; //! bram clock
reg [WD_BRAM_DAT-1:0] r_bram_wr_dout_d1 = 0; //! bram data in temp one clock
reg [WD_BRAM_DAT-1:0] r_bram_wr_din = 0; //! bram data out
reg r_bram_wr_en = 0; //! bram enable
reg r_bram_wr_rst = 0; //! bram reset high
reg [WD_BRAM_WEN-1:0] r_bram_wr_we = 0; //! bram write enable
//connect out
assign m_bram_wr_addr = r_bram_wr_addr ;
assign m_bram_wr_clk = i_sys_clk ;
assign m_bram_wr_din = r_bram_wr_din ;
assign m_bram_wr_en = r_bram_wr_en ;
assign m_bram_wr_rst = r_bram_wr_rst ;
assign m_bram_wr_we = r_bram_wr_we ;
// ----------------------------------------------------------
//! shk interface
reg r_shk0_hp_valid = 0; //! master valid shake
reg r_shk0_hp_msync = 0; //! master data synchronize
reg [WD_SHK0_DATA-1:0] r_shk0_hp_mdata = 0; //! master data value
reg [WD_SHK0_ADDR-1:0] r_shk0_hp_maddr = 0; //! master address value
assign m_shk0_hp_valid = r_shk0_hp_valid;
assign m_shk0_hp_msync = r_shk0_hp_msync;
assign m_shk0_hp_mdata = r_shk0_hp_mdata;
assign m_shk0_hp_maddr = r_shk0_hp_maddr;
// ----------------------------------------------------------
//! delay count
reg [WD_WR_DELAY-1:0] r_wr_delay_cnt = 0;
//========================================================
//always and assign to drive logic and connect
/* end verilog
*/
/* @begin state machine */
//state name
localparam IDLE = 0; //! state idle
localparam START = 1; //! start read ddr
localparam SHK_REQ = 6; //! update addr of DDR
localparam SHK_WR = 2; //! shake write data to bram
localparam DELAY = 3; //! delay wait
localparam SWITCH = 4; //! chose if continue
localparam OVER = 5; //! object over
//state variable
reg [3:0] cstate = IDLE;//! current state
//state logic
always @(posedge i_sys_clk)
if(!i_sys_resetn)
begin
cstate <= IDLE;
end
else if(i_frame_start_trig) //force skip SHK false
begin
cstate <= START; //
end
else
begin
case(cstate)
IDLE : if(i_frame_start_trig) //whether goto next state
begin
if(1) //which state to go
begin
cstate <= START;
end
end
START: if(1) //state change:
begin
if(r_frame_start_chose == 0) //state switch: error frame start
begin
cstate <= OVER;
end
else if(1) //state switch: normal start write
begin
cstate <= SHK_REQ;
end
end
SHK_REQ: if(1) //state change:
begin
if(1) //state switch:
begin
cstate <= SHK_WR;
end
end
SHK_WR: if(m_shk0_hp_ready) //state change: ddr once read over
begin
if(1) //state switch:
begin
cstate <= DELAY;
end
end
DELAY: if(r_wr_delay_cnt == NB_WR_DELAY - 1'b1) //state change:
begin
if(1) //state switch:
begin
cstate <= SWITCH;
end
end
SWITCH: if(1) //state change:
begin
if(r_shk0_hp_maddr == w_frame_start_addr
+ NB_SHK0_ONCE * (NB_FRAME_ALLS - 1)) //state switch: address of ddr is full
begin
cstate <= OVER;
end
else
begin
cstate <= SHK_REQ;
end
end
OVER: if(1) //state change:
begin
if(1) //state switch:
begin
cstate <= IDLE;
end
end
default: cstate <= IDLE;
endcase
end
/* @end state machine */
// ----------------------------------------------------------
//! frame info
always@(posedge i_sys_clk)
begin
if(cstate == IDLE) //state IDLE reset
begin
if(i_frame_start_trig)
begin
case(i_frame_start_trig)
'b0000_0001: r_frame_start_chose <= 1;
'b0000_0010: r_frame_start_chose <= 2;
'b0000_0100: r_frame_start_chose <= 3;
'b0000_1000: r_frame_start_chose <= 4;
'b0001_0000: r_frame_start_chose <= 5;
'b0010_0000: r_frame_start_chose <= 6;
'b0100_0000: r_frame_start_chose <= 7;
'b1000_0000: r_frame_start_chose <= 8;
default: r_frame_start_chose <= 0; //error
endcase
end
else
begin
r_frame_start_chose <= 1'b0;
end
end
end
assign w_frame_start_addr = r_frame_start_chose == 1 ? NB_START_ADDR0 :
r_frame_start_chose == 2 ? NB_START_ADDR1 :
r_frame_start_chose == 3 ? NB_START_ADDR2 :
r_frame_start_chose == 4 ? NB_START_ADDR3 :
r_frame_start_chose == 5 ? NB_START_ADDR4 :
r_frame_start_chose == 6 ? NB_START_ADDR5 :
r_frame_start_chose == 7 ? NB_START_ADDR6 :
r_frame_start_chose == 8 ? NB_START_ADDR7 :
1'b0;
always@(posedge i_sys_clk)
begin
if(cstate == IDLE) //state IDLE reset
begin
r_bram_full_trig <= 1'b0;
end
else if(cstate == DELAY)
begin
if(r_wr_delay_cnt == 0)
begin
r_bram_full_trig <= 1'b1;
end
else
begin
r_bram_full_trig <= 1'b0;
end
end
end
// ----------------------------------------------------------
//! bram interface
always@(posedge i_sys_clk)
begin
if(cstate == IDLE || cstate == SHK_REQ) //state IDLE reset
begin
r_bram_wr_addr <= 1'b0;
end
else if(cstate == SHK_WR)
begin
if(r_bram_wr_we) //ddr addr count sync with we
begin
r_bram_wr_addr <= r_bram_wr_addr + 1'b1;
end
end
end
always@(posedge i_sys_clk)
begin
if(cstate == IDLE) //state IDLE reset
begin
r_bram_wr_din <= 1'b0;
end
else if(cstate == SHK_WR)
begin
r_bram_wr_din <= m_shk0_hp_sdata;//data stream connect
end
end
always@(posedge i_sys_clk)
begin
if(cstate == IDLE || cstate == DELAY) //state IDLE reset
begin
r_bram_wr_en <= 1'b0;
end
else if(cstate == SHK_REQ)
begin
r_bram_wr_en <= 1'b1;
end
end
always@(posedge i_sys_clk)
begin
if(cstate == IDLE) //state IDLE reset
begin
r_bram_wr_rst <= 1'b1;
end
else if(cstate == SHK_REQ)
begin
r_bram_wr_rst <= 1'b0;
end
end
always@(posedge i_sys_clk)
begin
if(cstate == IDLE) //state IDLE reset
begin
r_bram_wr_we <= 1'b0;
end
else if(cstate == SHK_WR)
begin
r_bram_wr_we <= m_shk0_hp_ssync;
end
end
// ----------------------------------------------------------
//! shk hp interface
always@(posedge i_sys_clk)
begin
if(cstate == IDLE || cstate == SHK_WR) //state IDLE reset
begin
r_shk0_hp_valid <= 1'b0;
end
else if(cstate == SHK_REQ)
begin
r_shk0_hp_valid <= 1'b1;
end
end
always@(posedge i_sys_clk)
begin
if(cstate == START) //state IDLE reset
begin
r_shk0_hp_maddr <= w_frame_start_addr;
end
else if(cstate == SWITCH)
begin
r_shk0_hp_maddr <= r_shk0_hp_maddr + NB_SHK0_ONCE;
end
end
// ----------------------------------------------------------
//! delay count
always@(posedge i_sys_clk)
begin
if(cstate == IDLE || cstate == SHK_REQ) //state IDLE reset
begin
r_wr_delay_cnt <= 1'b0;
end
else if(cstate == DELAY)
begin
r_wr_delay_cnt <= r_wr_delay_cnt + 1'b1;
end
end
//========================================================
//module and task to build part of system
//========================================================
//expand and plug-in part with version
// ----------------------------------------------------------
//! error info
reg [WD_ERR_INFO-1:0] r_err_shk_info1 = 0; //! error info
assign m_err_shk_info1 = r_err_shk_info1;
always@(posedge i_sys_clk)
begin
if(!i_sys_resetn) //system reset
begin
r_err_shk_info1 <= 1'b0; //
end
else if(1) //
begin
r_err_shk_info1[0] <= i_frame_start_trig && cstate != IDLE; //frame start not in IDLE state
r_err_shk_info1[1] <= cstate == START && r_frame_start_chose == 0; //frame start signal format error
r_err_shk_info1[2] <= cstate == SHK_WR && r_bram_wr_addr > NB_BRAM_ONC; //frame once write more than request
end
end
//========================================================
//ila and vio to debug and monitor
endmodule
/* end verilog
logic
sim
*/
随机推荐
- 玩转 CMS
玩转 CMS 目前接手的内容管理系统(CMS)基于 ant-design-vue-pro(简称模板项目或ant-vue-pro) 开发的,经过许多次迭代,形成了现在的模样(简称本地项目). 假如让一名 ...
- C语言,变长数组的用法
在我的<C语言,结构体成员的地址>文章中,定义了一个demo_node结构体,其中用到变长数组char addr[0].本文以此为例,对C语言变长数组的基本用法展开介绍. typedef ...
- OGP协议的使用
OGP协议是一套Metatags的规格,用来标注页面,告诉我们你的网页快照.帮助社交app高效并准确的获取网页中的核心链接.标题.主图.正文摘要等信息,使得该网页在社交分享中有更好的展现体验. 如果网 ...
- phpBB3在Nginx反向代理中的X-Forwarded-For IP检查
记录一下phpBB3对反向代理中的IP处理机制 处理几个phpBB3项目迁移, 部分运行场景转移到内网, 需要外网通过nginx/openresty之类的网关反向代理进行访问. 在网关处已经正确配置了 ...
- 【Unity3D】表面着色器
1 前言 固定管线着色器一.固定管线着色器二 中介绍了 ShaderLib 的基本用法,本文将接着讲解表面着色器(Surface Shader)的用法.固定管线着色器基于 ShaderLib 命令 ...
- Python之正则表达式匹配电话号码和邮箱
代码 #! python3 # phoneAndEmail.py - Finds phone numbers and email addresses on Clipboard import pyper ...
- kafka学习笔记03-消息生产者producer
kafka学习笔记03-消息生产者producer 发送消息整体流程示意图 消息发送的流程示意图: (From:High-level overview of Kafka producer compon ...
- 程序员应具备的PS基本技能(二):程序员切图最常使用的工具组-选择工具组
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- python文件加锁模块之fcntl
# 示例 import fcntl with open('./test.txt', 'w') as f: fcntl.flock(f, fcntl.LOCK_EX) # 对文件加锁,除加锁进程外其它进 ...
- FolkMQ 是怎样进行消息的事务处理?
FolkMQ 提供了二段式提交的事务提交的机制(TCC 模型).允许生产者在发送消息时绑定到一个事务中并接收事务的管理,以确保消息的原子性(要么全成功,要么全失败).在 FolkMQ 中,事务是通过 ...