[E2E_L9]GOMFCTemplate的融合进阶
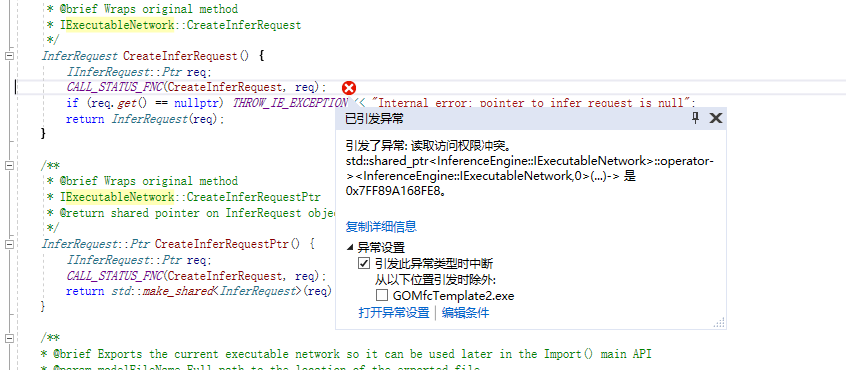
在前面出现的融合方法中,最突出的问题就是每次运算,都需要将整个推断的过程全部操作一遍,这样肯定是费时间的——所以我们需要将能够独立的地方独立出来,但是这个过中非常容易出现溢出的错误——经过一段时间的尝试,终于得到了相对稳定的结果,这里将结果记录下来:
// 用于推断的函数
Mat CGOMfcTemplate2Dlg::IEInfer(Mat m_mainframe)
{
//初始化IE
// --------------------------- 1.为IE准备插件-------------------------------------
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice::eCPU));
plugin.AddExtension(std::make_shared<Extensions::Cpu::CpuExtensions>());//Extension,useful
// --------------------------- 2.读取IR模型(xml和bin)---------------------------------
CNNNetReader networkReader;
networkReader.ReadNetwork("./road-segmentation-adas-0001.xml");
networkReader.ReadWeights("./road-segmentation-adas-0001.bin");
CNNNetwork network = networkReader.getNetwork();
// --------------------------- 3. 准备输入输出的------------------------------------------
InputsDataMap inputInfo(network.getInputsInfo());//获得输入信息
if (inputInfo.size() != 1) throw std::logic_error("错误,该模型应该为单输入");
auto lrInputInfoItem = inputInfo["data"]; //开始读入
int w = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[3]); //模型要求的输入大小
int h = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[2]);
network.setBatchSize(1);//只有1副图片,故BatchSize = 1
//准备输出数据
OutputsDataMap outputInfo(network.getOutputsInfo());//获得输出信息
std::string firstOutputName;
for (auto &item : outputInfo) {
if (firstOutputName.empty()) {
firstOutputName = item.first;
}
DataPtr outputData = item.second;
if (!outputData) {
throw std::logic_error("错误的格式,请检查!");
}
item.second->setPrecision(Precision::FP32);
}
// --------------------------- 4. 读取模型 ------------------------------------------(目视第4步骤最消耗时间)
ExecutableNetwork executableNetwork = plugin.LoadNetwork(network, {});
// --------------------------- 5. 创建推断 -------------------------------------------------
infer_request = executableNetwork.CreateInferRequest();
// --------------------------- 6. 将数据塞入模型 -------------------------------------------------
Blob::Ptr lrInputBlob = infer_request.GetBlob("data"); //data这个名字是我看出来的,实际上这里可以更统一一些
matU8ToBlob<float_t>(m_mainframe, lrInputBlob, 0);//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// --------------------------- 7. 推断结果 -------------------------------------------------
infer_request.Infer();//多张图片多次推断
// --------------------------- 8. 处理结果-------------------------------------------------------
const Blob::Ptr outputBlob = infer_request.GetBlob(firstOutputName);
const auto outputData = outputBlob->buffer().as<PrecisionTrait<Precision::FP32>::value_type*>();
size_t numOfImages = outputBlob->getTensorDesc().getDims()[0];
size_t numOfChannels = outputBlob->getTensorDesc().getDims()[1];
h = outputBlob->getTensorDesc().getDims()[2];
w = outputBlob->getTensorDesc().getDims()[3];
size_t nunOfPixels = w * h; //写在内存里的结果,还是要拼出来的
std::vector<cv::Mat> imgPlanes{ cv::Mat(h, w, CV_32FC1, &(outputData[0])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels * 2])) };
for (auto & img : imgPlanes) //本来是平的
img.convertTo(img, CV_8UC1, 255);
cv::Mat resultImg;
cv::merge(imgPlanes, resultImg);
return resultImg;
}

ExecutableNetwork executableNetwork = plugin.LoadNetwork(network, {});
infer_request.Infer();//多张图片多次推断
CNNNetwork CGOMfcTemplate2Dlg::IENetWork(string strXML, string strBIN)
{
CNNNetReader networkReader;
networkReader.ReadNetwork(strXML);
networkReader.ReadWeights(strBIN);
CNNNetwork network = networkReader.getNetwork();
return network;
}
string CGOMfcTemplate2Dlg::IENetSetup(CNNNetwork network)
{
InputsDataMap inputInfo(network.getInputsInfo());//获得输入信息
BlobMap inputBlobs; //保持所有输入的blob数据
if (inputInfo.size() != 1) throw std::logic_error("错误,该模型应该为单输入");
auto lrInputInfoItem = inputInfo["data"]; //开始读入
int h = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[2]);
int w = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[3]); //模型要求的输入大小
network.setBatchSize(1);//只有1副图片,故BatchSize = 1
//准备输出数据
OutputsDataMap outputInfo(network.getOutputsInfo());//获得输出信息
std::string firstOutputName;
for (auto &item : outputInfo) {
if (firstOutputName.empty()) {
firstOutputName = item.first;
}
DataPtr outputData = item.second;
if (!outputData) {
throw std::logic_error("错误的格式,请检查!");
}
item.second->setPrecision(Precision::FP32);
}
return firstOutputName;
}
InferencePlugin CGOMfcTemplate2Dlg::IEplugin(CNNNetwork network)
{
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice::eCPU));
plugin.AddExtension(std::make_shared<Extensions::Cpu::CpuExtensions>());//Extension,useful
return plugin;
}
ExecutableNetwork CGOMfcTemplate2Dlg::getNetWork(InferencePlugin plugin, CNNNetwork network)
{
ExecutableNetwork executableNetwork = plugin.LoadNetwork(network, {});
return executableNetwork;
}

std::string firstOutputName = IENetSetup(network);
InferRequest infer_request = executableNetwork.CreateInferRequest();
Blob::Ptr lrInputBlob = infer_request.GetBlob("data");
matU8ToBlob<float_t>(m_mainframe, lrInputBlob, 0);//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// ---------------------------推断结果 -------------------------------------------------
infer_request.Infer();//多张图片多次推断
// ---------------------------处理结果-------------------------------------------------------
const Blob::Ptr outputBlob = infer_request.GetBlob(firstOutputName);
const auto outputData = outputBlob->buffer().as<PrecisionTrait<Precision::FP32>::value_type*>();
size_t numOfImages = outputBlob->getTensorDesc().getDims()[0];
size_t numOfChannels = outputBlob->getTensorDesc().getDims()[1];
int h = outputBlob->getTensorDesc().getDims()[2];
int w = outputBlob->getTensorDesc().getDims()[3];
size_t nunOfPixels = w * h; //写在内存里的结果,还是要拼出来的
std::vector<cv::Mat> imgPlanes{ cv::Mat(h, w, CV_32FC1, &(outputData[0])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels * 2])) };
for (auto & img : imgPlanes) //本来是平的
img.convertTo(img, CV_8UC1, 255);
cv::Mat resultImg;
cv::merge(imgPlanes, resultImg);
showImage(resultImg, IDC_PIC); //显示原始图像
//摄像头显示循环,所有关于采集的操作是通过主线程传递控制变量到采集线程,而后由采集线程完成的
DWORD WINAPI CaptureThread(LPVOID lpParameter)
{
CGOMfcTemplate2Dlg* pDlg = (CGOMfcTemplate2Dlg*)lpParameter;
double t_start = (double)cv::getTickCount(); //开始时间
Mat tmpPrydown;
//#pragma omp parallel for
while (true)
{
if (pDlg->b_closeCam)//退出循环
break;
double t = ((double)cv::getTickCount() - t_start) / getTickFrequency();
if (t <= 0.1)//fps =10,主动降低速度
{
Sleep(100);
continue;
}
else
{
t_start = (double)cv::getTickCount();
}
//从directX中获得当前图像并显示出来
IplImage* queryframe = pDlg->cameraDs.QueryFrame();
//在2.0版本中可以强转,在3.0中需要使用函数
Mat camframe = cvarrToMat(queryframe);
pDlg->showImage(camframe, IDC_CAM); //显示原始图像
////根据条件,决定是否采用算法
Mat dst;
Mat img;
Mat tmp;
Mat divideGaussMin;
Mat divideGaussMiddle;
Mat divideGaussMax;
cvtColor(camframe, img, COLOR_BGR2GRAY);
cvtColor(img, img, COLOR_GRAY2BGR);
if (pDlg->bMethod) //这里实现的是灰度转彩色
{
//算法
if (img.empty())
{
return -1;
}
std::string firstOutputName = pDlg->IENetSetup(pDlg->network);
InferRequest infer_request = pDlg->executableNetwork.CreateInferRequest();
Blob::Ptr lrInputBlob = infer_request.GetBlob("data");
matU8ToBlob<float_t>(img, lrInputBlob, 0);//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// ---------------------------推断结果 -------------------------------------------------
infer_request.Infer();//多张图片多次推断
// ---------------------------处理结果-------------------------------------------------------
const Blob::Ptr outputBlob = infer_request.GetBlob(firstOutputName);
const auto outputData = outputBlob->buffer().as<PrecisionTrait<Precision::FP32>::value_type*>();
size_t numOfImages = outputBlob->getTensorDesc().getDims()[0];
size_t numOfChannels = outputBlob->getTensorDesc().getDims()[1];
int h = outputBlob->getTensorDesc().getDims()[2];
int w = outputBlob->getTensorDesc().getDims()[3];
size_t nunOfPixels = w * h; //写在内存里的结果,还是要拼出来的
std::vector<cv::Mat> imgPlanes{ cv::Mat(h, w, CV_32FC1, &(outputData[0])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels * 2])) };
for (auto & img : imgPlanes) //本来是平的
img.convertTo(img, CV_8UC1, 255);
cv::merge(imgPlanes, dst);
}
else
{
dst = img.clone();
}
pDlg->showImage(dst, IDC_PIC); //显示网络处理图像
}
return 0;
}
附件列表
[E2E_L9]GOMFCTemplate的融合进阶的更多相关文章
- [E2E_L8_1]segmentation_demo道路分割例子和GOMFCTemplate的初步融合
一.来源 模型例子自己带来副图像 二.简化 #include <algorithm> #include <fstream> #include <iomanip ...
- (E2E_L2)GOMfcTemplate在vs2017上的运行并融合Dnn模块
GOMfcTemplate一直运行在VS2012上运行的,并且开发出来了多个产品.在技术不断发展的过程中,出现了一些新的矛盾:1.由于需要使用DNN模块,而这个模块到了4.0以上的OpenCV才支持的 ...
- [BZOI2014]大融合——————线段树进阶
竟然改了不到一小时就改出来了, 可喜可贺 Description Solution 一开始想的是边两侧简单路径之和的乘积,之后发现这是个树形结构,简单路径数就是节点数. 之后的难点就变成了如何求线段树 ...
- C#进阶系列——WebApi 接口参数不再困惑:传参详解
前言:还记得刚使用WebApi那会儿,被它的传参机制折腾了好久,查阅了半天资料.如今,使用WebApi也有段时间了,今天就记录下API接口传参的一些方式方法,算是一个笔记,也希望能帮初学者少走弯路.本 ...
- NLP系列(4)_朴素贝叶斯实战与进阶
作者: 寒小阳 && 龙心尘 时间:2016年2月. 出处:http://blog.csdn.net/han_xiaoyang/article/details/50629608 htt ...
- Ionic APP-Web SPA开发进阶(一)AngularJS全栈工程狮进阶
AngularJS全栈工程狮进阶 前言 学习了一段时间AngularJS,开始接触移动端APP开发.为了响应公司开发需求,采用"Hybrid"混血开发方法.采用Ionic前端框架, ...
- 【进阶3-3期】深度广度解析 call 和 apply 原理、使用场景及实现(转)
这是我在公众号(高级前端进阶)看到的文章,现在做笔记 https://github.com/yygmind/blog/issues/22 call() 和 apply() call() 方法调用一个 ...
- Apollo 1 融合 Spring 的三个入口
前言 Spring 作为 Java 世界非官方标准框架,任何一个中间件想要得到良好的发展,必须完美支持 Spring 的各种特性,即:无缝融入 Spring. Apollo 作为分布式配置中心,服务于 ...
- Scala进阶之路-为什么要学习Scala以及开发环境搭建
Scala进阶之路-为什么要学习Scala以及开发环境搭建 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 最近人工智能和大数据那是相当的火呀,人工智能带动了Python的流行,区块 ...
随机推荐
- C#中多集合组合实现
C#中多集合组合使用方法,主要用到 Enumerable.Join方法 var skuInfoList = new Dictionary<int, List<long>>(); ...
- Spring— 用更优雅的方式发HTTP请求(RestTemplate详解)
RestTemplate是Spring提供的用于访问Rest服务的客户端,RestTemplate提供了多种便捷访问远程Http服务的方法,能够大大提高客户端的编写效率. 我之前的HTTP开发是用ap ...
- git 上传代码流程
1.首先下载git,安装到本地 2.点击启动git bash.exe 3.现在本地创建一个文件夹 后cd 进入该文件夹内 4.在文件夹内输入 git init 是此文件夹变成一个git本地仓库 5 ...
- VLAN实验5:利用三层交换机实现VLAN间路由
实验环境: 实验拓扑图: 实验编址: 实验步骤:1.基本配置按照实验编址表在PC上进行基本的IP地址配置,三层交换机上先不做任何配置. 测试PC1与PC2的连通性 正常 测试PC1与PC3的连通性 ...
- MSF MS11-050攻击实践及内存保护技术
内存攻击指的是攻击者利用软件安全漏洞,构造恶意输入导致软件在处理输入数据时出现非预期错误,将输入数据写入内存中的某些特定敏感位置,从而劫持软件控制流,转而执行外部输入的指令代码,造成目标系统被获取远程 ...
- 2013.9.3 - OpenNER第十一天
下午接受了天猫某高管的交叉面试,在图书馆电面的,感觉面的不怎么好,他先问了我飞天的情况,还有我做了什么,他感觉和我聊不到一起去,我感觉应该是下午在地下铁喝的那杯咖啡让我慌了神,后来他又问了大数组抽取最 ...
- Django设置应用名与模型名为中文
修改polls包里面的apps.py: from django.apps import AppConfig class PollsConfig(AppConfig): name = 'polls' v ...
- ReentrantReadWriteLock中的锁降级
锁降级指的是写锁降级为读锁. 因为读锁与读锁之间不互斥,如果是写锁与读锁或者是写锁与写锁就会互斥,所以由写锁变为读锁就降级了. 如果当前线程拥有写锁,然后将其释放,最后再获取读锁,这种并不能称之为锁降 ...
- 多个线程分别顺序交替打印一种不同字符abcdefg(已实现随便多少个线程打印多少个字符,利用线程池实现多线程)
下面实现多线程顺序打印字符"abcdefg": 实现Runnable接口: /** * @author: rhyme * @date: 2019-08-17 14:39 * @to ...
- 【云栖社区002-二分估值法】要求不用数学库,求 sqrt (2)精确到小数点后10位(Java版)
如题 初步审题的时候,想到的是暴力搜索:初步设置一个合法的种子,依次按照1e-2,1e-3,1e-4,1e-5,1e-6 , 1e-7...暴力搜索,额,就是太麻烦了. 打比赛搜索写多了,一看见题目就 ...