STM32---喜提点灯
一:编译第一个程序
int main() //主函数
{ } void SystemInit() //在执行主函数前,会被调用。不进行实现。在启动文件中被调用
{ }
; Reset handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
启动文件:复位程序部分汇编代码
二:LED灯原理图
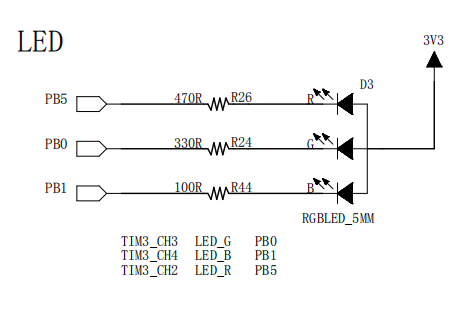
注意:其中PB0是绿灯

三:LED点亮--代码实现

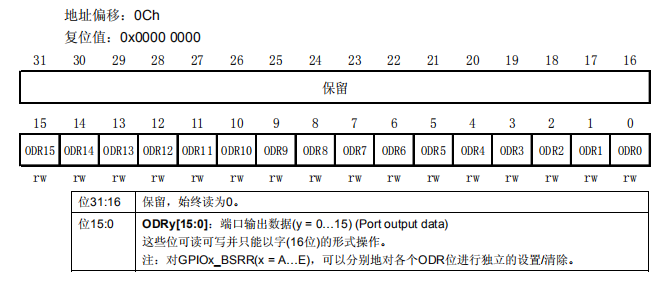
(一)第一步:点亮LED灯PB0引脚绿灯,必须设置端口输出数据寄存器,使得其对应的引脚输出低电平,产生电压差。点亮绿灯
*(unsigned int*)(0x40010c0c) &= ~(<<);
(二)第二步: 需要设置端口低寄存器,设置低八位0-7,设置为通用推挽输出模式,最大速度设置为10MHZ
*(unsigned int*)(0x40010c00) |= (<<);
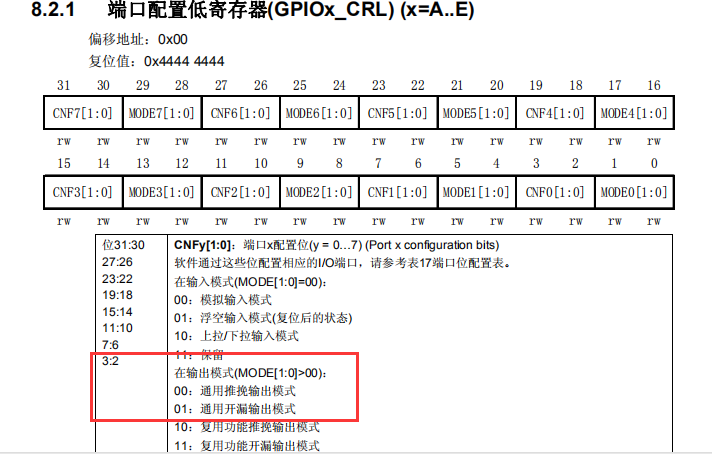
开漏和推挽区别在于:
开漏:输出端相当于三极管的集电极,要得到高电平状态需要上拉电阻才行。 适合于做电流型的驱动,其吸收电流的能力相对强(一般20ma以内)。
推挽输出:可以输出高,低电平,连接数字器件。
开漏电路就是指以MOS FET的漏极为输出的电路。一般的用法是会在漏极外部的电路添加上拉电阻。完整的开漏电路应该由开漏器件和开漏上拉电阻组成。
推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止
引入一句话:“复用输出当前的引脚功能功能有外设控制,并不由通用IO控制,因此你要通过操作GPIO来驱动LED的话,肯定是用通用的”
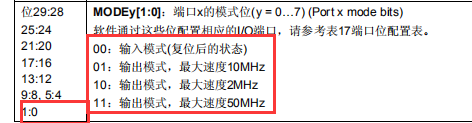
速度可以随便选择
(三)第三步:设置外设GPIOB端口的时钟开启
*(unsigned int*)(0x40021018) |= (<<);
(四)全部代码
int main()
{
*(unsigned int*)(0x40021018) |= (<<); *(unsigned int*)(0x40010c00) |= (<<); *(unsigned int*)(0x40010c0c) &= ~(<<); } void SystemInit()
{ }
(五)实现状态

四:实现寄存器映射
(一)实现头文件
//用于存放STM32寄存器映射代码 //外设 perirhral
#define PERIRH_BASE (unsigned int)0x40000000 //前面unsigned int表示的是地址是32位 #define APB1PERIRH_BASE PERIRH_BASE
#define APB2PERIRH_BASE (PERIRH_BASE+0x10000)
#define AHBPERIRH_BASE (PERIRH_BASE+0x20000) #define RCC_BASE (AHBPERIRH_BASE+0x1000)
#define GPIOB_BASE (APB2PERIRH_BASE+0x0c00) #define RCC_APB2ENR *(unsigned int*)(RCC_BASE+0x18) //下面是实际要操作的IO口,使用*(unsigned int*)进行数据写入和读取
#define GPIOB_ODR *(unsigned int*)(GPIOB_BASE+0x0c)
#define GPIOB_CRL *(unsigned int*)(GPIOB_BASE+0x00)
#define GPIOB_CRH *(unsigned int*)(GPIOB_BASE+0x04)
(二)对主函数改写
int main()
{
//第三步:设置外设GPIOB端口的时钟开启
RCC_APB2ENR |= (<<); //第二步: 需要设置端口低寄存器,设置低八位0-7,设置为通用推挽输出模式,最大速度设置为10MHZ//注意:配置模式是,需要先进行清零
GPIOB_CRL &= ~(0x0f); //清零
GPIOB_CRL |= (<<); //第一步:点亮LED灯PB0引脚绿灯,必须设置端口输出数据寄存器,使得其对应的引脚输出低电平,产生电压差。点亮绿灯
GPIOB_ODR &= ~(<<); //只需要设置低16位即可 }
五:实现库函数初步
(一)stm32F10x.h头文件,定义引脚
#ifndef _STM32F10X_H_
#define _STM32F10X_H_ #define PERIRH_BASE (unsigned int)0x40000000 #define APB1PERIRH_BASE PERIRH_BASE
#define APB2PERIRH_BASE (PERIRH_BASE+0x10000)
#define AHBPERIRH_BASE (PERIRH_BASE+0x20000) #define RCC_BASE (AHBPERIRH_BASE+0x1000)
#define GPIOB_BASE (APB2PERIRH_BASE+0x0c00) #define RCC_APB2ENR *(unsigned int*)(RCC_BASE+0x18) #define GPIOB_CRL *(unsigned int*)(GPIOB_BASE+0x00)
#define GPIOB_CRH *(unsigned int*)(GPIOB_BASE+0x04)
#define GPIOB_IDR *(unsigned int*)(GPIOB_BASE+0x08)
#define GPIOB_ODR *(unsigned int*)(GPIOB_BASE+0x0c)
#define GPIOB_BSRR *(unsigned int*)(GPIOB_BASE+0x10)
#define GPIOB_BRR *(unsigned int*)(GPIOB_BASE+0x14)
#define GPIOB_LCKR *(unsigned int*)(GPIOB_BASE+0x18) typedef unsigned int uint32_t;
typedef unsigned short uint16_t; typedef struct
{
uint32_t CRL;
uint32_t CRH;
uint32_t IDR;
uint32_t ODR;
uint32_t BSRR;
uint32_t BRR;
uint32_t LCKR;
}GPIO_TypeDef; typedef struct
{
uint32_t CR;
uint32_t CFGR;
uint32_t CIR;
uint32_t APB2RSTR;
uint32_t APB1RSTR;
uint32_t AHBENR;
uint32_t APB2ENR;
uint32_t APB1ENR;
uint32_t BDCR;
uint32_t CSR;
}RCC_Def; #define GPIOB ((GPIO_TypeDef*)GPIOB_BASE)
#define RCC ((RCC_Def*)RCC_BASE) #endif
(二)stmF10x_gpio.h头文件用于实现GPIO类型口的相关声明和定义
#ifndef _STM32F10X_GPIO_H_
#define _STM32F10X_GPIO_H_ #include "stm32F10x.h" #define GPIO_PIN_0 ((uint16_t)0x0001)
#define GPIO_PIN_1 ((uint16_t)0x0002)
#define GPIO_PIN_2 ((uint16_t)0x0004)
#define GPIO_PIN_3 ((uint16_t)0x0008)
#define GPIO_PIN_4 ((uint16_t)0x0010)
#define GPIO_PIN_5 ((uint16_t)0x0020)
#define GPIO_PIN_6 ((uint16_t)0x0040)
#define GPIO_PIN_7 ((uint16_t)0x0080) #define GPIO_PIN_8 ((uint16_t)0x0100)
#define GPIO_PIN_9 ((uint16_t)0x0200)
#define GPIO_PIN_10 ((uint16_t)0x0400)
#define GPIO_PIN_11 ((uint16_t)0x0800)
#define GPIO_PIN_12 ((uint16_t)0x1000)
#define GPIO_PIN_13 ((uint16_t)0x2000)
#define GPIO_PIN_14 ((uint16_t)0x4000)
#define GPIO_PIN_15 ((uint16_t)0x8000)
#define GPIO_PIN_ALL ((uint16_t)0xFFFF) typedef enum
{
GPIO_Speed_10MHZ = ,
GPIO_Speed_2MHZ,
GPIO_Speed_50MHZ
}GPIOSpeed_Typedef; typedef enum
{ GPIO_Mode_AIN = 0x0, // 模拟输入 (0000 0000)b
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入 (0000 0100)b
GPIO_Mode_IPD = 0x28, // 下拉输入 (0010 1000)b
GPIO_Mode_IPU = 0x48, // 上拉输入 (0100 1000)b GPIO_Mode_Out_OD = 0x14, // 开漏输出 (0001 0100)b
GPIO_Mode_Out_PP = 0x10, // 推挽输出 (0001 0000)b
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出 (0001 1100)b
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出 (0001 1000)b
}GPIOMode_TypeDef; typedef struct
{
uint16_t GPIO_Pin;
uint16_t GPIO_Speed;
uint16_t GPIO_Mode;
}GPIO_InitTypeDef; void GPIO_SetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin);
void GPIO_Init(GPIO_TypeDef* GPIOx,GPIO_InitTypeDef* GPIO_InitStruct); #endif
(三)stmF10x_gpio.c实现头文件中的函数
#include "stm32F10x_gpio.h" void GPIO_SetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
{
GPIOx->BSRR |= GPIO_Pin;
} void GPIO_ResetBits(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin)
{
GPIOx->BRR |= GPIO_Pin;
} void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00; /*---------------------- GPIO 模式配置 --------------------------*/
// 把输入参数GPIO_Mode的低四位暂存在currentmode
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F); // bit4是1表示输出,bit4是0则是输入
// 判断bit4是1还是0,即首选判断是输入还是输出模式
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
// 输出模式则要设置输出速度
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*-------------GPIO CRL 寄存器配置 CRL寄存器控制着低8位IO- -------*/
// 配置端口低8位,即Pin0~Pin7
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
// 先备份CRL寄存器的值
tmpreg = GPIOx->CRL; // 循环,从Pin0开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
// pos的值为1左移pinpos位
pos = ((uint32_t)0x01) << pinpos; // 令pos与输入参数GPIO_PIN作位与运算,为下面的判断作准备
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos; //若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
// pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << ;
//把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask; // 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos); // 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
// 把前面处理后的暂存值写入到CRL寄存器之中
GPIOx->CRL = tmpreg;
}
/*-------------GPIO CRH 寄存器配置 CRH寄存器控制着高8位IO- -----------*/
// 配置端口高8位,即Pin8~Pin15
if (GPIO_InitStruct->GPIO_Pin > 0x00FF)
{
// // 先备份CRH寄存器的值
tmpreg = GPIOx->CRH; // 循环,从Pin8开始配对,找出具体的Pin
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = (((uint32_t)0x01) << (pinpos + 0x08)); // pos与输入参数GPIO_PIN作位与运算
currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos); //若currentpin=pos,则找到使用的引脚
if (currentpin == pos)
{
//pinpos的值左移两位(乘以4),因为寄存器中4个寄存器位配置一个引脚
pos = pinpos << ; //把控制这个引脚的4个寄存器位清零,其它寄存器位不变
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask; // 向寄存器写入将要配置的引脚的模式
tmpreg |= (currentmode << pos); // 判断是否为下拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
// 下拉输入模式,引脚默认置0,对BRR寄存器写1可对引脚置0
GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
// 判断是否为上拉输入模式
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
// 上拉输入模式,引脚默认值为1,对BSRR寄存器写1可对引脚置1
GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));
}
}
}
// 把前面处理后的暂存值写入到CRH寄存器之中
GPIOx->CRH = tmpreg;
}
}
(四)主函数
#include "stm32F10x.h"
#include "stm32F10x_gpio.h" #define LED_G_GPIO_CLK_ENABLE RCC->APB2ENR |= (1<<3)
#define LED_G_GPIO_PORT GPIOB
#define LED_G_GPIO_PIN GPIO_PIN_0 void delay(uint32_t count)
{
for(;count!=;count--);
} int main()
{
GPIO_InitTypeDef GPIO_InitStructure; LED_G_GPIO_CLK_ENABLE; //开启时钟 GPIO_InitStructure.GPIO_Pin = LED_G_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHZ; GPIO_Init(LED_G_GPIO_PORT,&GPIO_InitStructure); while()
{
GPIO_SetBits(LED_G_GPIO_PORT,LED_G_GPIO_PIN);
delay(0xFFFF);
GPIO_ResetBits(LED_G_GPIO_PORT,LED_G_GPIO_PIN);
delay(0xFFFF);
} } void SystemInit()
{ }
STM32---喜提点灯的更多相关文章
- 恭喜磊哥喜提n+1
昨天下午两点多磊哥突然喊我下楼,第一反应是"这孙子,抽烟就直说,还说个事,你以外你是吉祥村大姐啊". 心里骂完以后我慢慢悠悠下楼了,见他在打电话我先默默点上一支,准备待他结束以后对 ...
- 谁说双非本科就一定无缘阿里?H哥粉丝6面通过,喜提Offer!
本文来自作者投稿(原作者:小胖儿),原作者是一位2021届本科毕业生,就读于一所双非(非985.非211)院校,在今年2月份的时候,我曾经帮他指导过简历,并且根据他的简历内容帮他提了一些可能会问到的问 ...
- win10 WSL kali 下载源 --另外 恭喜马哥喜提博客
第一篇也不知道写什么,就把昨晚安装kali时遇见的事写一下吧! 因为win10应用商店已经加入了kali,也省的我再去网上下载镜像,可下载后 wsl 未能设置为开发人员模式, 这算是失误吧!步骤如 ...
- 剑指阿里P6,25岁小伙怒斩三面,喜提offer(Java研发岗)
本文提供者:洎扰の庸人 微信公众号:慕容千语的架构笔记.欢迎关注一起进步. 进阿里一直都是身为程序员的我,最初的梦想,经过去年面试蚂蚁金服失败的挫折后,今年再次鼓起勇气投简历,经过一位前辈的内推省了很 ...
- 喜提JDK的BUG一枚!多线程的情况下请谨慎使用这个类的stream遍历。
你好呀,我是歪歪. 前段时间在 RocketMQ 的 ISSUE 里面冲浪的时候,看到一个 pr,虽说是在 RocketMQ 的地盘上发现的,但是这个玩意吧,其实和 RocketMQ 没有任何关系. ...
- 恭喜社区喜提三枚新 Committer!
点击上方 蓝字关注我们 ✎ 编 者 按 Apache DolphinScheduler 社区最近又迎来三位新的 Committer,凭借对社区的高质量贡献,社区很荣幸地邀请他们加入 Committer ...
- 新一代大数据任务调度 - Apache DolphinScheduler喜提十大开源新锐项目 & 最具人气项目
经 10000+ 开发者公开票选,20+专家评审. 10+ 主编团打分,历经数月打磨,11 月 19 日,由InfoQ 发起并组织的[2020中国技术力量年度榜单评选]结果正式揭晓. 2020 年度十 ...
- ZJOI2019一轮停课刷题记录
Preface 菜鸡HL终于狗来了他的省选停课,这次的时间很长,暂定停到一试结束,不过有机会二试的话还是可以搞到4月了 这段时间的学习就变得量大而且杂了,一般以刷薄弱的知识点和补一些新的奇怪技巧为主. ...
- wqy的easy
题解不再赘述,\(wqy\) 写的很详细了,记点细节. \(A:\) \(n+1\) 位置也要差分一下,否则无法保证正确性. \(B:\) 贪心喜提二十分...充分考虑时间和\(std\)复杂度的关系 ...
随机推荐
- 【Beta】 Scrum meeting 3
第三天 日期:2019/6/26 前言 组内进行第三次讨论,所有组员都到场,项目已经全部完成. 一.今天任务完成情况.成员贡献时间 组员 任务 贡献时间 徐浩杰 完成项目的全部测试,项目运行稳定 2h ...
- LG5487 【模板】线性递推+BM算法
[模板]线性递推+BM算法 给出一个数列 \(P\) 从 \(0\) 开始的前 \(n\) 项,求序列 \(P\) 在\(\bmod~998244353\) 下的最短线性递推式,并在 \(\bmod~ ...
- CH6303 天天爱跑步
6303 天天爱跑步 0x60「图论」例题 描述 小C同学认为跑步非常有趣,于是决定制作一款叫作<天天爱跑步>的游戏.<天天爱跑步>是一个养成类游戏,需要玩家每天按时上线,完成 ...
- NPOI - .NET Excel & Word操作组件
概要 NPOI 是 POI 项目的 .NET 版本.POI是一个开源的Java读写Excel.WORD等微软OLE2组件文档的项目. NPOI是构建在POI 3.x版本之上的,它可以在没有安装Offi ...
- Dynamics 365 on-premises 安装
安装Dynamics 365环境配置要求: 系统版本:Windows Server 2016 SQL 版本: Microsoft SQL Server 2016 SP2 Dynamics 365 版本 ...
- 团队协作editconfig与eslint
editconfig root = true [*] charset = utf-8 indent_style = space indent_size = 2 end_of_line = lf ins ...
- c字符数组之两头堵模型
char *其实就是char[length]的首元素地址 实验环境:centos7下qt5.11 中文char类型占3个字节 char[length]="特别车队"其实等价于ch ...
- 物体检测方法(1) - YOLO 详解
最近遇到一些卡证识别的检测问题,打算先把理论知识梳理一下,随后还会梳理一版代码注释. 以前的region+proposal来检测的框架,这一系列速度和精度不断提高,但是还是无法达到实时.存在的主要问题 ...
- NOI.ac模拟赛20181021 ball sequence color
T1 ball 可以发现每次推动球时,是将每个球的位置 −1-1−1 ,然后把最左边的球放到 P−1P-1P−1 处. 记个 −1-1−1 次数,再用set维护就好了. #include <bi ...
- 一般spring配置上下文
<?xml version="1.0" encoding="UTF-8"?> <project xmlns="http://mave ...