基于PCL的屏幕选点、框选点云、单点选取
1. 单点选取
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h> typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloudT; // Mutex: //
boost::mutex cloud_mutex; struct callback_args
{
// structure used to pass arguments to the callback function
PointCloudT::Ptr clicked_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
}; void pp_callback(const pcl::visualization::PointPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args *)args;
if (event.getPointIndex() == -1)
return;
PointT current_point;
event.getPoint(current_point.x, current_point.y, current_point.z);
data->clicked_points_3d->points.push_back(current_point);
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<PointT> red(data->clicked_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("clicked_points");
data->viewerPtr->addPointCloud(data->clicked_points_3d, red, "clicked_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, "clicked_points");
std::cout << current_point.x << " " << current_point.y << " " << current_point.z << std::endl;
}
void main()
{
std::string filename("bunny.pcd");
//visualizer
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer")); if (pcl::io::loadPCDFile(filename, *cloud))
{
std::cerr << "ERROR: Cannot open file " << filename << "! Aborting..." << std::endl;
return;
}
std::cout << cloud->points.size() << std::endl;
//viewer->addPointCloud(cloud, "bunny"); cloud_mutex.lock(); // for not overwriting the point cloud // Display pointcloud:
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0); // Add point picking callback to viewer:
struct callback_args cb_args;
PointCloudT::Ptr clicked_points_3d(new PointCloudT);
cb_args.clicked_points_3d = clicked_points_3d;
cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(viewer);
viewer->registerPointPickingCallback(pp_callback, (void*)&cb_args);
std::cout << "Shift+click on three floor points, then press 'Q'..." << std::endl;
// Spin until 'Q' is pressed:
viewer->spin();
std::cout << "done." << std::endl; cloud_mutex.unlock(); while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
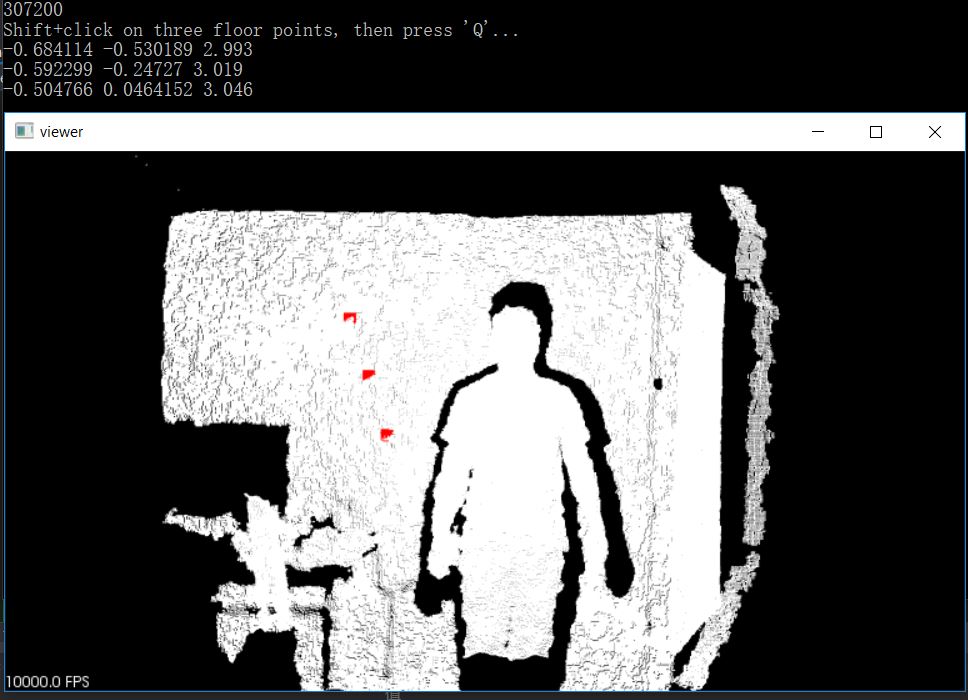
注意:点的选取,需要同时按住shift和鼠标左键
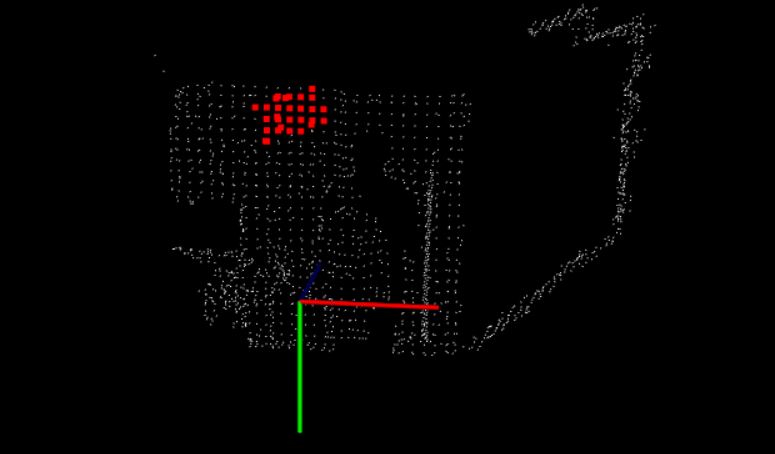
2. 区域选点
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
#include <iostream>
#include <vector> pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
int num = 0; void pp_callback(const pcl::visualization::AreaPickingEvent& event, void* args)
{
std::vector< int > indices;
if (event.getPointsIndices(indices)==-1)
return; for (int i = 0; i < indices.size(); ++i)
{
clicked_points_3d->points.push_back(cloud->points.at(indices[i]));
} pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(clicked_points_3d, 255, 0, 0); std::stringstream ss;
std::string cloudName;
ss << num++;
ss >> cloudName;
cloudName += "_cloudName"; viewer->addPointCloud(clicked_points_3d, red, cloudName);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, cloudName);
} void main()
{
if (pcl::io::loadPCDFile("bunny.pcd", *cloud))
{
std::cerr << "ERROR: Cannot open file " << std::endl;
return;
}
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0);
viewer->registerAreaPickingCallback(pp_callback, (void*)&cloud); //VoxelGrid
pcl::VoxelGrid<pcl::PointXYZ> vgF;
vgF.setInputCloud(cloud);
vgF.setLeafSize(0.1, 0.1, 0.1);
vgF.filter(*cloud); while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
基于PCL的屏幕选点、框选点云、单点选取的更多相关文章
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- 29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)
0 引言 最近项目中用到了基于PCL开发的基于平面的点云和CAD模型的配准算法,点云平面提取采用的算法如下. 1 基于PCL的点云平面分割拟合算法 2 参数及其意义介绍 (1)点云下采样 1. 参数: ...
- 自己写的基于bootstrap风格的弹框插件
自己写的一款基于bootstrap风格的弹框插件,暂时只有确认框.提示框.后续功能扩展.bug修改再更新. ;(function($){ //默认参数 var PARAMS; var DEFAULTP ...
- 基于CSS3动态背景登录框代码
基于CSS3动态背景登录框代码.这是一款基于jQuery+CSS3实现的带有动画效果的动态背景登陆框特效.效果图如下: 在线预览 源码下载 实现的代码. html代码: <div class ...
- .NET MVC 学习笔记(四)— 基于Bootstarp自定义弹出框
.NET MVC 学习笔记(四)—— 基于Bootstarp自定义弹出框 转载自:https://www.cnblogs.com/nele/p/5327380.html (function ($) { ...
- 7款基于jquery的动画搜索框
无论是电商网站,还是媒体网,还是个人博客,每个网站都有属于自己个性化的搜索框.今天小编给大家带来7款基于jquery的动画搜索框.每个搜索框都采用了动画效果,一起看下效果图吧. 在线预览 源码下载 ...
- 基于jQuery select下拉框美化插件
分享一款基于jQuery select下拉框美化插件.该插件适用浏览器:IE8.360.FireFox.Chrome.Safari.Opera.傲游.搜狗.世界之窗.效果图如下: 在线预览 源码下 ...
- 基于Bootstrap的下拉框插件bootstrap-select
写在前面: 在这次的项目中,没有再使用liger-ui做为前端框架了,改为了Bootstrap,这次也好接触下新的技术,在学习的过程中发现,Bootstrap的一些组件基本都是采用class的形式,就 ...
- 基于xposed逆向微信、支付宝、云闪付来实现个人免签支付功能
我的个人网站如何实现支付功能? 想必很多程序员都有过想开发一个自己的网站来获得一些额外的收入,但做这件事会遇到支付这个问题.目前个人网站通过常规手法是无法实现支付管理的,所有支付渠道都需要以公司的身份 ...
随机推荐
- HihoCoder 1068 RMQ-ST算法+BIT
以前都是用的BIT或者线段树(前者多一些). 对于ST(Sparse Table),在求倍增or公共祖先(LCA)时见过,说明还有其他用处,所以还是学习一下. 首先是预处理,用动态规划(DP)解决. ...
- ACM学习历程—SNNUOJ 1239 Counting Star Time(树状数组 && 动态规划 && 数论)
http://219.244.176.199/JudgeOnline/problem.php?id=1239 这是这次陕西省赛的G题,题目大意是一个n*n的点阵,点坐标从(1, 1)到(n, n),每 ...
- #503. 「LibreOJ β Round」ZQC 的课堂 容斥原理+Treap
题目: 题解: 比较容易发现 : \(x,y\) 的贡献是独立的. 所以可以分开考虑. 假设我们考虑 \(x\).向量在 \(x\) 方向的投影依次是 : \(\{a_1,a_2, ... ,a_n\ ...
- webpack中多模块依赖
多模块依赖 刚才的例子,我们仅仅是跑通了webpack通过entry.js入口文件进行打包的例子.下面我们就来看一下它是否真的支持CommonJs和AMD两种模块机制呢?下面我们新建多几个js文件吧! ...
- (转)App工程结构搭建:几种常见Android代码架构分析
关于Android架构,因为手机的限制,目前我觉得也确实没什么大谈特谈的,但是从开发的角度,看到整齐的代码,优美的分层总是一种舒服的享受的. 从艺术的角度看,其实我们是在追求一种美. 本文先分析几个当 ...
- 直接通过ADO操作Access数据库
我在<VC知识库在线杂志>第十四期和第十五期上曾发表了两篇文章——“直接通过ODBC读.写Excel表格文件”和“直接通过DAO读.写Access文件”,先后给大家介绍了ODBC和DAO两 ...
- 在windows环境中使用varnish
varnish 的windows 版本下载地址: http://sourceforge.net/projects/cygvarnish/files/windows-zip-bundle/ ...
- java代码switch语句求分数等级
总结:从键盘输入分数----- 如果在0到100内,则输出等级 小于0或者是大于100都不能输出,这里用if-else条件判断. package com.c2; import java.util.Sc ...
- POJ_3740 Easy Finding ——精确覆盖问题,DLX模版
Easy Finding Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 18790 Accepted: 5184 Des ...
- oracle 11g r2 rac +openfiler 2.99 +centos 6.5+vbox
继上篇openfiler 2.99安装之后,这一篇讲介绍openfiler的存储配置和oracle 端的服务配置 参考文档:https://www.oracle.com/technetwork/cn/ ...