基于PCL的屏幕选点、框选点云、单点选取
1. 单点选取
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h> typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloudT; // Mutex: //
boost::mutex cloud_mutex; struct callback_args
{
// structure used to pass arguments to the callback function
PointCloudT::Ptr clicked_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
}; void pp_callback(const pcl::visualization::PointPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args *)args;
if (event.getPointIndex() == -1)
return;
PointT current_point;
event.getPoint(current_point.x, current_point.y, current_point.z);
data->clicked_points_3d->points.push_back(current_point);
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<PointT> red(data->clicked_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("clicked_points");
data->viewerPtr->addPointCloud(data->clicked_points_3d, red, "clicked_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, "clicked_points");
std::cout << current_point.x << " " << current_point.y << " " << current_point.z << std::endl;
}
void main()
{
std::string filename("bunny.pcd");
//visualizer
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer")); if (pcl::io::loadPCDFile(filename, *cloud))
{
std::cerr << "ERROR: Cannot open file " << filename << "! Aborting..." << std::endl;
return;
}
std::cout << cloud->points.size() << std::endl;
//viewer->addPointCloud(cloud, "bunny"); cloud_mutex.lock(); // for not overwriting the point cloud // Display pointcloud:
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0); // Add point picking callback to viewer:
struct callback_args cb_args;
PointCloudT::Ptr clicked_points_3d(new PointCloudT);
cb_args.clicked_points_3d = clicked_points_3d;
cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(viewer);
viewer->registerPointPickingCallback(pp_callback, (void*)&cb_args);
std::cout << "Shift+click on three floor points, then press 'Q'..." << std::endl;
// Spin until 'Q' is pressed:
viewer->spin();
std::cout << "done." << std::endl; cloud_mutex.unlock(); while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
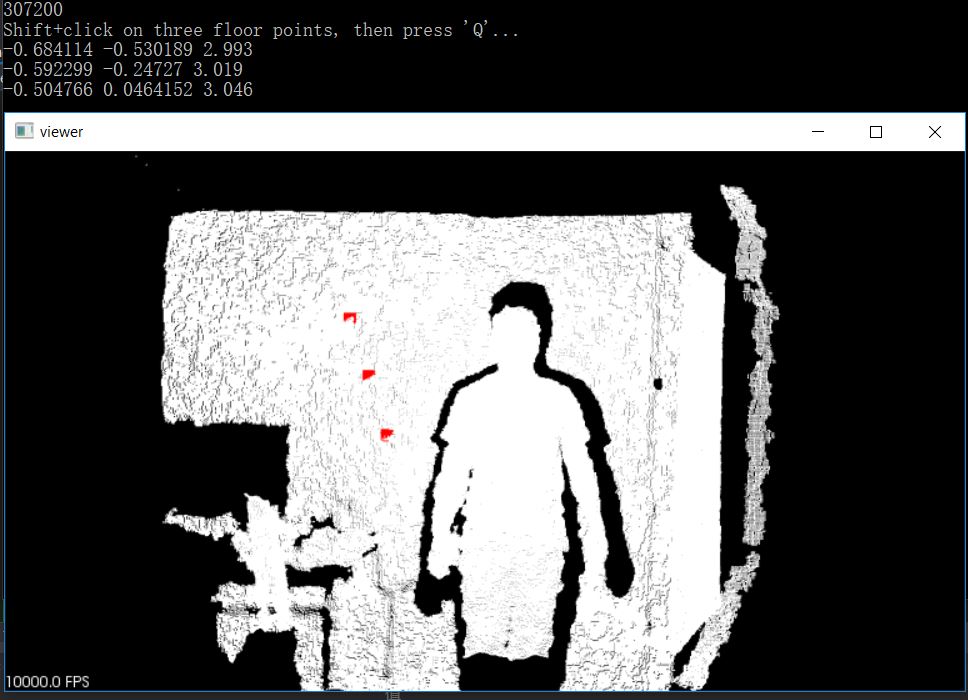
注意:点的选取,需要同时按住shift和鼠标左键
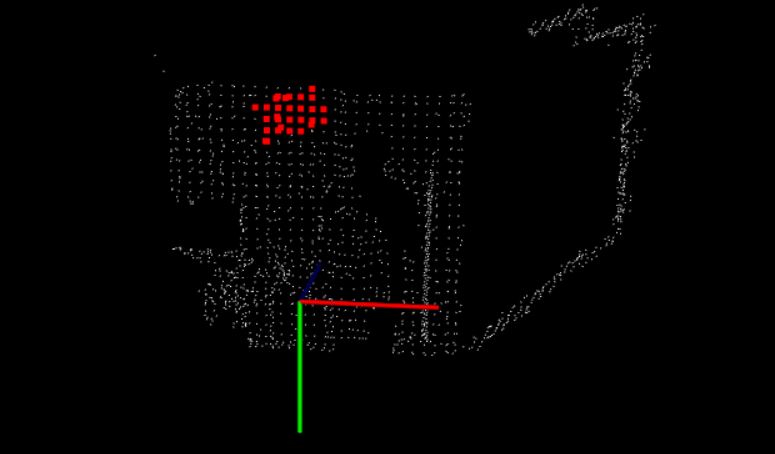
2. 区域选点
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
#include <iostream>
#include <vector> pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
int num = 0; void pp_callback(const pcl::visualization::AreaPickingEvent& event, void* args)
{
std::vector< int > indices;
if (event.getPointsIndices(indices)==-1)
return; for (int i = 0; i < indices.size(); ++i)
{
clicked_points_3d->points.push_back(cloud->points.at(indices[i]));
} pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(clicked_points_3d, 255, 0, 0); std::stringstream ss;
std::string cloudName;
ss << num++;
ss >> cloudName;
cloudName += "_cloudName"; viewer->addPointCloud(clicked_points_3d, red, cloudName);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, cloudName);
} void main()
{
if (pcl::io::loadPCDFile("bunny.pcd", *cloud))
{
std::cerr << "ERROR: Cannot open file " << std::endl;
return;
}
viewer->addPointCloud(cloud, "bunny");
viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0);
viewer->registerAreaPickingCallback(pp_callback, (void*)&cloud); //VoxelGrid
pcl::VoxelGrid<pcl::PointXYZ> vgF;
vgF.setInputCloud(cloud);
vgF.setLeafSize(0.1, 0.1, 0.1);
vgF.filter(*cloud); while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
基于PCL的屏幕选点、框选点云、单点选取的更多相关文章
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- 29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)
0 引言 最近项目中用到了基于PCL开发的基于平面的点云和CAD模型的配准算法,点云平面提取采用的算法如下. 1 基于PCL的点云平面分割拟合算法 2 参数及其意义介绍 (1)点云下采样 1. 参数: ...
- 自己写的基于bootstrap风格的弹框插件
自己写的一款基于bootstrap风格的弹框插件,暂时只有确认框.提示框.后续功能扩展.bug修改再更新. ;(function($){ //默认参数 var PARAMS; var DEFAULTP ...
- 基于CSS3动态背景登录框代码
基于CSS3动态背景登录框代码.这是一款基于jQuery+CSS3实现的带有动画效果的动态背景登陆框特效.效果图如下: 在线预览 源码下载 实现的代码. html代码: <div class ...
- .NET MVC 学习笔记(四)— 基于Bootstarp自定义弹出框
.NET MVC 学习笔记(四)—— 基于Bootstarp自定义弹出框 转载自:https://www.cnblogs.com/nele/p/5327380.html (function ($) { ...
- 7款基于jquery的动画搜索框
无论是电商网站,还是媒体网,还是个人博客,每个网站都有属于自己个性化的搜索框.今天小编给大家带来7款基于jquery的动画搜索框.每个搜索框都采用了动画效果,一起看下效果图吧. 在线预览 源码下载 ...
- 基于jQuery select下拉框美化插件
分享一款基于jQuery select下拉框美化插件.该插件适用浏览器:IE8.360.FireFox.Chrome.Safari.Opera.傲游.搜狗.世界之窗.效果图如下: 在线预览 源码下 ...
- 基于Bootstrap的下拉框插件bootstrap-select
写在前面: 在这次的项目中,没有再使用liger-ui做为前端框架了,改为了Bootstrap,这次也好接触下新的技术,在学习的过程中发现,Bootstrap的一些组件基本都是采用class的形式,就 ...
- 基于xposed逆向微信、支付宝、云闪付来实现个人免签支付功能
我的个人网站如何实现支付功能? 想必很多程序员都有过想开发一个自己的网站来获得一些额外的收入,但做这件事会遇到支付这个问题.目前个人网站通过常规手法是无法实现支付管理的,所有支付渠道都需要以公司的身份 ...
随机推荐
- 用eclipse来制作并使用可执行的jar文件
我近来用java写了一个股票收益分析的小程序,用于计算我的股票操作所带来的的收益.这里,记录了如何将源代码打包成可执行的命令的一个过程. 1:生成可执行的jar文件 选中工程,选择菜单中的export ...
- HihoCoder1127 二分图三·二分图最小点覆盖和最大独立集
二分图三·二分图最小点覆盖和最大独立集 时间限制:10000ms 单点时限:1000ms 内存限制:256MB 描述 在上次安排完相亲之后又过了挺长时间,大家好像都差不多见过面了.不过相亲这个事不是说 ...
- 2018年总结和2019年的Flag
---恢复内容开始--- 目前截止到现在工作将近一年半了,今天工作上主要后端主要是用了两种语言,java和Python(2.7),今年完成主要的工作主要使用Python在写一些脚本来满足财务和人资部门 ...
- windows下安装storm1.1.0并启动
64位windows安装storm前需要先搞定zookeeper和python,所以下面我们3步走: 一.zookeeper 1.上https://zookeeper.apache.org/点击下方d ...
- oracle11g,安装失败,提示找不到文件,win7 64位下报错
提示: 未找到文件 E:\app\Administrator\product\11.2.0\dbhome_5\owb\external\oc4j_applications\applications\W ...
- erlang的tcp服务器模板
改来改去,最后放github了,贴的也累,蛋疼 还有一个tcp批量客户端的,也一起了 大概思路是 混合模式 使用erlang:send_after添加recv的超时处理 send在socket的opt ...
- php redis 命令合集
1.https://www.cnblogs.com/aipiaoborensheng/p/5666005.html 2.https://www.cnblogs.com/doanddo/p/734908 ...
- Java-Runoob:Java 基础语法
ylbtech-Java-Runoob:Java 基础语法 1.返回顶部 1. Java 基础语法 一个 Java 程序可以认为是一系列对象的集合,而这些对象通过调用彼此的方法来协同工作.下面简要介绍 ...
- python学习(十) 自带电池
10.1 模块 >>> import math >>> math.sin(0) 0.0 10.1.1 模块是程序 假设自己写的hello.py放在c:\python ...
- python's thirty-first day for me re模块
正则表达式: re 模块 可以读懂 你写的正则表达式,根据你写的表达式去执行任务. 正则表达式:字符串的操作. 使用一些规则来检测字符串是否符合我的要求 —— 表单验证 从一段字符串中找到符合我要 ...