ROS话题通信C++(附launch启动方式)
ROS话题通信C++(附launch启动方式)
创建工作空间
mkdir -p topic_ws/src
cd topic_ws
catkin_make
设置环境变量
source ./devel/setup.bash
source $ROS_PACKAGE_PATH
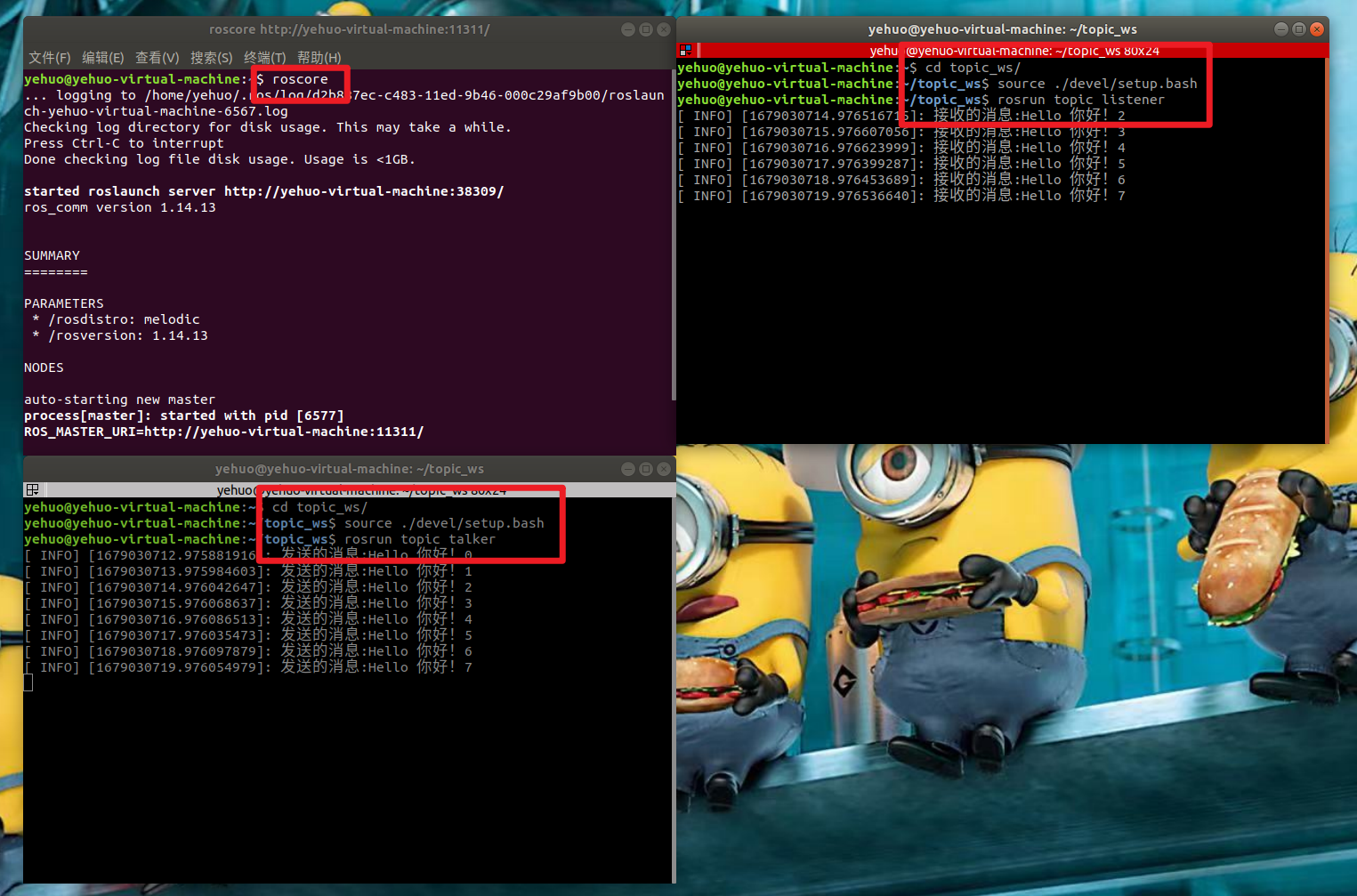
效果图
未使用launch
使用launch

结构总览

友情提醒
每一步编辑完,执行一下 Ctrl+Shift+B进行编译,及时排查错误
准备工作
第一步:创建工作空间
配置:roscpp rospy std_msgs
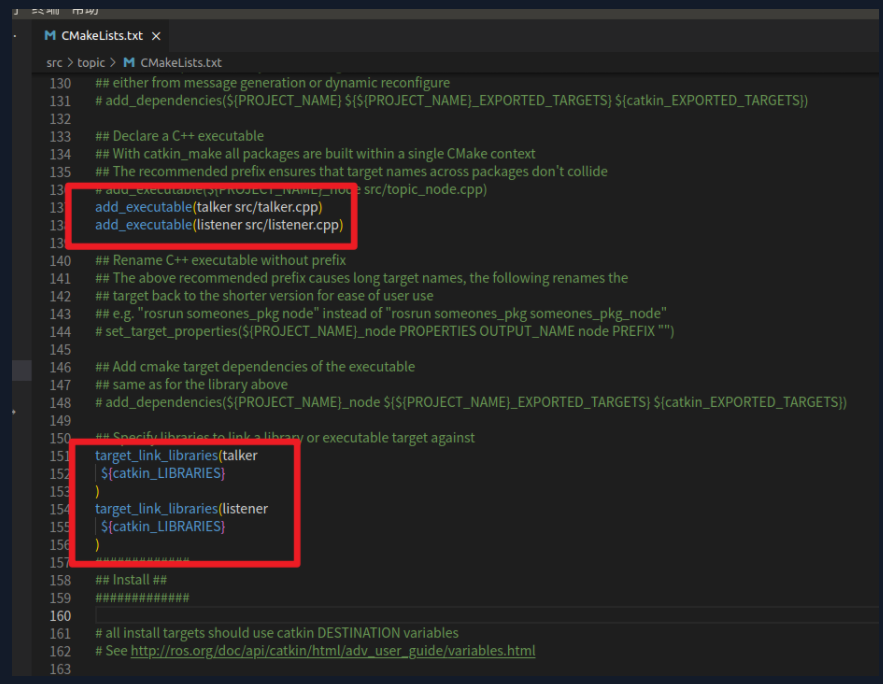
src/topic/CMakeLists.txt
src/topic/src/talker.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒10次)
ros::Rate r(1);
//节点
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息:%s",msg.data.c_str());
//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
//暂无应用
ros::spinOnce();
}
return 0;
}
src/topic/src/listener.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("接收的消息:%s",msg_p->data.c_str());
// ROS_INFO("我听见:%s",(*msg_p).data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe<std_msgs::String>("chatter",10,doMsg);
//5.处理订阅的消息(回调函数)
//6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
}
启动指令
1、第一个终端执行 roscore
2、第二个终端进入topic_ws的路径
3、执行 source ./devel/setup.bash
4、执行 rosrun topic talker
5、第三个终端进入topic_ws的路径
6、执行 source ./devel/setup.bash
7、执行 rosrun topic listener
使用launch
src/topic/launch/start_topic.launch
<launch>
<node pkg="topic" type="talker" name="talker" output="screen"/>
<node pkg="topic" type="listener" name="listener" output="screen"/>
</launch>
启动指令
1、roscore
2、进入topic_ws的路径
3、source ./devel/setup.bash
4、roslaunch topic start_topic.launch
made by zyl
ROS话题通信C++(附launch启动方式)的更多相关文章
- (六)ROS话题---节点之间通信的方式
1. 理解 ROS 话题: (Ctrl+Alt+T 打开一个新终端) 运行下面的命令: $ roscore (Ctrl+Alt+T 打开一个新终端) $ rosrun turtlesim turtle ...
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- jenkins:新增节点是启动方式没有Launch agent by connecting it to the master
默认在这里的配置是禁用 所以启动方式只有两种,缺少Launch agent by connecting it to the master
- ROS Learning-008 beginner_Tutorials ROS话题
ROS Indigo beginner_Tutorials-07 ROS话题 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS Learning-011 beginner_Tutorials (编程) 编写 ROS 话题版的 Hello World 程序(Python版)
ROS Indigo beginner_Tutorials-10 编写 ROS 话题版的 Hello World 程序(Python版) 我使用的虚拟机软件:VMware Workstation 11 ...
- ROS串口通信
身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手. 于是想先 ...
- 4.7 ROS分布式通信
4.7 ROS分布式通信 ROS是一个分布式计算环境.一个运行中的ROS系统可以包含分布在多台计算机上多个节点.根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信. 因此,ROS对网络配置 ...
- Hive 学习笔记(启动方式,内置服务)
一.Hive介绍 Hive是基于Hadoop的一个数据仓库,Hive能够将SQL语句转化为MapReduce任务进行运行. Hive架构图分为以下四部分. 1.用户接口 Hive有三个用户接口: 命令 ...
- Service 简介 启动方式 生命周期 MD
Markdown版本笔记 我的GitHub首页 我的博客 我的微信 我的邮箱 MyAndroidBlogs baiqiantao baiqiantao bqt20094 baiqiantao@sina ...
- 如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏)
问题:如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏) 在XP下,添加方式是直接把快捷方式复制到%appdata%\Microsoft\Internet Explorer\Qui ...
随机推荐
- usbip:(二)从linux内核了解usb
一.前言 1.首先了解一下EHCI.UHCI和OHCI. 从硬件上来说,usb 设备要想工作,除了外设本身,必须依赖于 usb host controller.一般来说,一个电脑里有一个 usb ho ...
- java GUI AWT包
第一个GUI程序,在netbeans里因为没有自动导包,害的我差点崩溃,因为没有导入AWT包,所以 public class Jfram { /** * @param args the command ...
- 阿里云 rocketMq 延时消息
初始化消费者和生产者 生产者 设置rocketmq的accesskey 和secretkey 以及rocketmq的 binder server. 首先 编辑一个配置类,将关于配置rocketmq的东 ...
- Qt ui 文件转换为python代码文件
python -m PyQt5.uic.pyuic -o ui_xxx.py xxx.ui
- <雪山飞狐><飞狐外传 >合辑剧情+随笔
严格而言雪山飞狐与飞狐外传的剧情并不相关,前者写作与前,然后飞狐外传算是对雪山飞狐中形象并不饱满的胡斐作进一步补充描述,同时对二十余年前苗人凤与胡一刀之间故事的补充,以及众人叙述中的一些补充.因此虽然 ...
- 第一个知识点:import 和 export
//全部导入import people from './example' //有一种特殊情况,即允许你将整个模块当作单一对象进行导入//该模块的所有导出都会作为对象的属性存在import * as e ...
- 在CentOS7中安装Redis
一.检查操作系统中是否安装gcc依赖 [root@192 bin]# yum list installed gcc 如果出现上面图片内容则是已经安装.(由于我是安装了的,所以会存在) 二.安装gcc- ...
- 将npm安装镜像切换到淘宝
cnpm(推荐) 安装 pm install cnpm -g --registry=https://registry.npm.taobao.org 使用 cnpm install [xxxxxxx] ...
- deepin 调整微信、百度网盘、迅雷等等软件字体的方法
一.修改微信字体大小方法: 1.方法一:修改deepinwine桌面环境字体 env WINEPREFIX="$HOME/.deepinwine/Deepin-WeChat" wi ...
- 网易二面-Arthas的底层原理
众所周知,阿里开源的Arthas已经成为Java开发中调优的基本工具,其功能在于监控JVM运行情况,并对CPU.内存状况生成报告或者是火炬图. 从JDK5开始,java.lang.instrument ...