ROS话题通信C++(附launch启动方式)
ROS话题通信C++(附launch启动方式)
创建工作空间
mkdir -p topic_ws/src
cd topic_ws
catkin_make
设置环境变量
source ./devel/setup.bash
source $ROS_PACKAGE_PATH
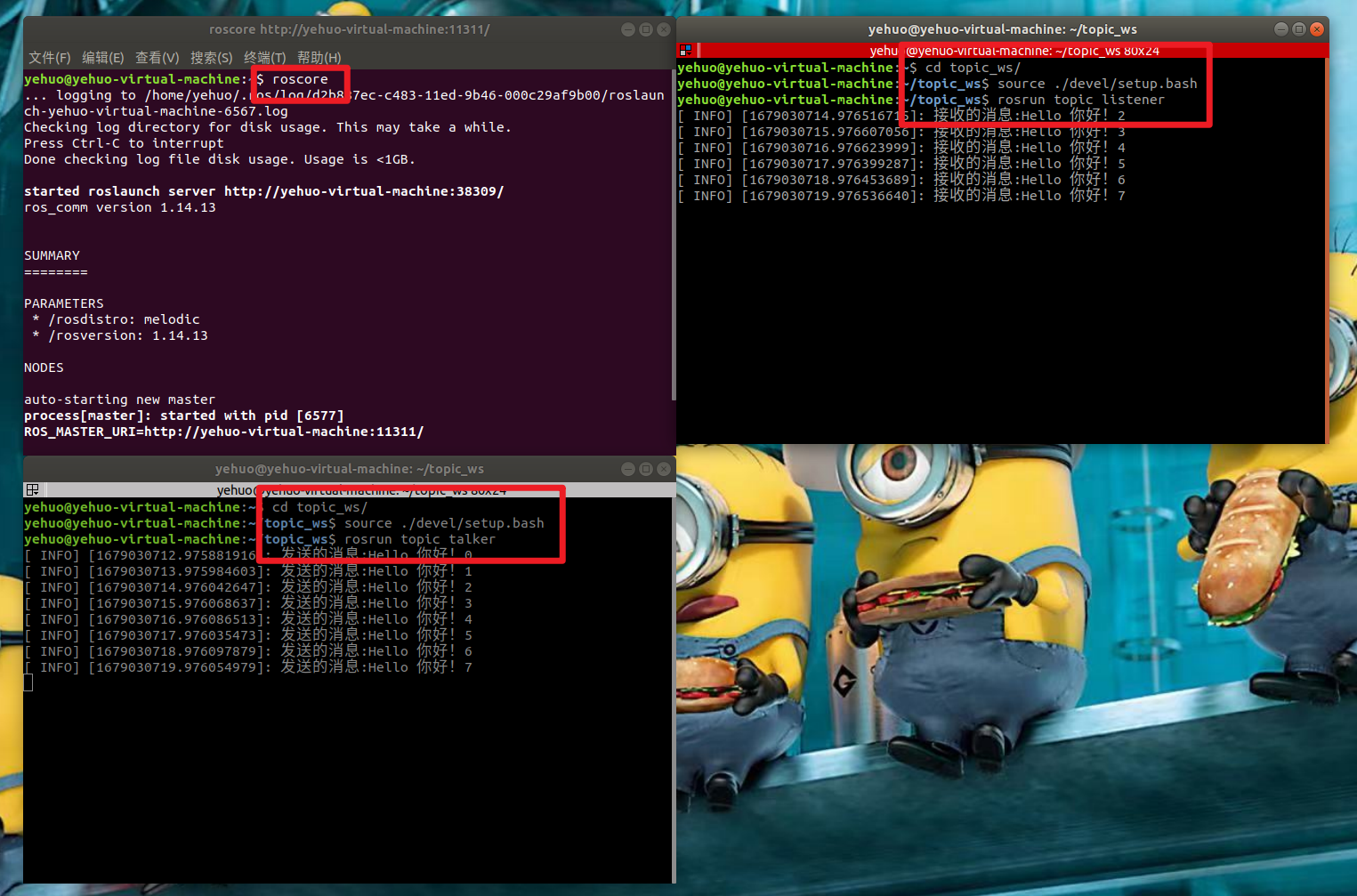
效果图
未使用launch
使用launch

结构总览

友情提醒
每一步编辑完,执行一下 Ctrl+Shift+B进行编译,及时排查错误
准备工作
第一步:创建工作空间
配置:roscpp rospy std_msgs
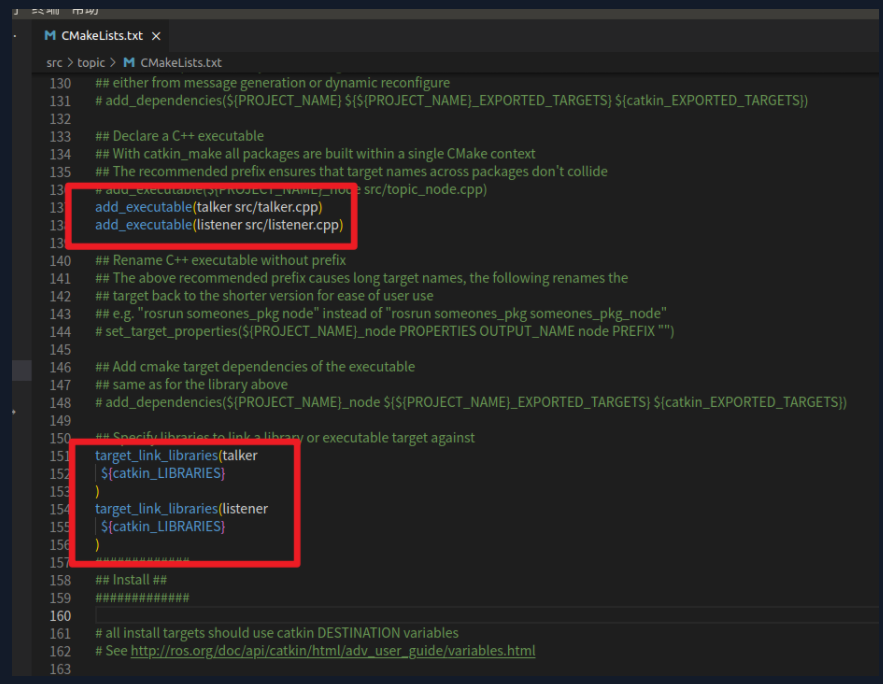
src/topic/CMakeLists.txt
src/topic/src/talker.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒10次)
ros::Rate r(1);
//节点
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息:%s",msg.data.c_str());
//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
//暂无应用
ros::spinOnce();
}
return 0;
}
src/topic/src/listener.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("接收的消息:%s",msg_p->data.c_str());
// ROS_INFO("我听见:%s",(*msg_p).data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe<std_msgs::String>("chatter",10,doMsg);
//5.处理订阅的消息(回调函数)
//6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
}
启动指令
1、第一个终端执行 roscore
2、第二个终端进入topic_ws的路径
3、执行 source ./devel/setup.bash
4、执行 rosrun topic talker
5、第三个终端进入topic_ws的路径
6、执行 source ./devel/setup.bash
7、执行 rosrun topic listener
使用launch
src/topic/launch/start_topic.launch
<launch>
<node pkg="topic" type="talker" name="talker" output="screen"/>
<node pkg="topic" type="listener" name="listener" output="screen"/>
</launch>
启动指令
1、roscore
2、进入topic_ws的路径
3、source ./devel/setup.bash
4、roslaunch topic start_topic.launch
made by zyl
ROS话题通信C++(附launch启动方式)的更多相关文章
- (六)ROS话题---节点之间通信的方式
1. 理解 ROS 话题: (Ctrl+Alt+T 打开一个新终端) 运行下面的命令: $ roscore (Ctrl+Alt+T 打开一个新终端) $ rosrun turtlesim turtle ...
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- jenkins:新增节点是启动方式没有Launch agent by connecting it to the master
默认在这里的配置是禁用 所以启动方式只有两种,缺少Launch agent by connecting it to the master
- ROS Learning-008 beginner_Tutorials ROS话题
ROS Indigo beginner_Tutorials-07 ROS话题 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS Learning-011 beginner_Tutorials (编程) 编写 ROS 话题版的 Hello World 程序(Python版)
ROS Indigo beginner_Tutorials-10 编写 ROS 话题版的 Hello World 程序(Python版) 我使用的虚拟机软件:VMware Workstation 11 ...
- ROS串口通信
身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手. 于是想先 ...
- 4.7 ROS分布式通信
4.7 ROS分布式通信 ROS是一个分布式计算环境.一个运行中的ROS系统可以包含分布在多台计算机上多个节点.根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信. 因此,ROS对网络配置 ...
- Hive 学习笔记(启动方式,内置服务)
一.Hive介绍 Hive是基于Hadoop的一个数据仓库,Hive能够将SQL语句转化为MapReduce任务进行运行. Hive架构图分为以下四部分. 1.用户接口 Hive有三个用户接口: 命令 ...
- Service 简介 启动方式 生命周期 MD
Markdown版本笔记 我的GitHub首页 我的博客 我的微信 我的邮箱 MyAndroidBlogs baiqiantao baiqiantao bqt20094 baiqiantao@sina ...
- 如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏)
问题:如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏) 在XP下,添加方式是直接把快捷方式复制到%appdata%\Microsoft\Internet Explorer\Qui ...
随机推荐
- Coursera Programming Languages, Part C 华盛顿大学 Week 1
来进入这一系列课程的最后一 Part 啦! \(P1\) 我们介绍了 \(ML\),一种 static typing 的 functional language \(P2\) 我们介绍了 \(Rack ...
- [419] C1 Harbingers Of War OpCodez
[419] C1 Harbingers Of War Client 00 SendProtocolVersion 01 MoveBackwardToLocation 02 Say 03 Request ...
- iClock数据服务器默认账号密码
网络空间资产搜索: shodan 搜索 默认密码 admin/a***n End!!!
- 定长线程池Demo
1 import java.util.concurrent.ExecutorService; 2 import java.util.concurrent.Executors; 3 4 /** 5 * ...
- infoq上看视频1(持续更新)
打破工程师思维 http://www.infoq.com/cn/presentations/break-engineer-thinking 百姓网人: 从技术走向产品的那点儿事 http://www. ...
- JDBC——连接SQL Server环境配置
JDBC:使用JAVA语言操作关系型数据库的API.是一套标准的接口. 步骤 1.创建工程,导入驱动jar包 2.注册驱动:Class.forName("com.mysql.jdbc.Dri ...
- (论文笔记)Deep Neural Network for YouTube Recommendation
YouTube推荐系统上的深度神经网络 [总结] 在召回模型中,用到的特征比较粗,在训练过程中,目的是训练出一个用户向量u(通过用户本身的浏览和观看信息和统计学信息,假设是N维的),用户向量的用途分两 ...
- C# byte[]与string的相互转换
byte[]转string: string str = System.Text.Encoding.Default.GetString( byteArray ); string转byte[]: byte ...
- pyqt学习
- Core_DataCollect BacNet说明
/* * BACnet_AI 0 模拟输入.定义一个标准对象,其属性表示模拟输入的外部可见特征. BACnet_AO 1 模拟输出.定义一个标准对象,其属性表示模拟输出的外部可见特征. BACnet_ ...