【数值计算方法】线性方程组迭代算法的Python实现
线性方程组迭代算法的Python实现
jacobi,GS,SOR迭代法
def JacobiIter(A:np.ndarray,
b:np.ndarray,
tol:float=1e-5,
maxIter:int=100)->Tuple[np.ndarray,np.ndarray]:
"""使用Jacobi迭代法求解线性方程组Ax=b
input:
A: np.ndarray, 系数矩阵
b: np.ndarray, 右端常数
tol: float, 误差限
maxIter: int, 最大迭代次数
output:
x: np.ndarray, 解向量
errors: np.ndarray, 误差序列
"""
from numpy import dot
from numpy.linalg import norm
x0=np.zeros(b.shape)
L=-1*np.tril(A,k=-1).copy()
U=-1*np.triu(A,k=1).copy()
D=np.diag(np.diag(A)).copy()
Dinv=np.linalg.inv(D)
errors=[]
for i in range(maxIter):
x_next=dot(Dinv,(dot((L+U),x0)+b))
# error check
error=norm(b-dot(A,x_next),2)/norm(b,2)
errors.append(error)
if error<tol:
return x_next,np.array(errors)
else:
x0=x_next
def GaussIter(A:np.ndarray,
b:np.ndarray,
tol:float=1e-5,
maxIter:int=100)->Tuple[np.ndarray,np.ndarray]:
"""使用Gauss-Seidel迭代法求解线性方程组Ax=b
input:
A: np.ndarray, 系数矩阵
b: np.ndarray, 右端常数
tol: float, 误差限
maxIter: int, 最大迭代次数
output:
x: np.ndarray, 解向量
errors: np.ndarray, 误差序列
"""
from numpy import dot
from numpy.linalg import norm
x0=np.zeros(b.shape)
L=-1*np.tril(A,k=-1).copy()
U=-1*np.triu(A,k=1).copy()
D=np.diag(np.diag(A)).copy()
DsubLinv=np.linalg.inv(D-L)
errors=[]
for i in range(maxIter):
x_next=DsubLinv.dot(U).dot(x0)+DsubLinv.dot(b)
# error check
error=norm(b-dot(A,x_next),2)/norm(b,2)
errors.append(error)
if error<tol:
return x_next,np.array(errors)
else:
x0=x_next
def SORIter(A:np.ndarray,
b:np.ndarray,
w:float=1.0,
tol:float=1e-5,
maxIter:int=100)->Tuple[np.ndarray,np.ndarray]:
"""使用SOR迭代法求解线性方程组Ax=b
input:
A: np.ndarray, 系数矩阵
b: np.ndarray, 右端常数
w: float, 松弛因子(0~2.0)
tol: float, 误差限
maxIter: int, 最大迭代次数
output:
x: np.ndarray, 解向量
errors: np.ndarray, 误差序列
"""
from numpy import dot
from numpy.linalg import norm
x0=np.zeros(b.shape)
L=-1*np.tril(A,k=-1).copy()
U=-1*np.triu(A,k=1).copy()
D=np.diag(np.diag(A)).copy()
DsubOmegaLinv=np.linalg.inv(D-w*L)
errors=[]
for i in range(maxIter):
x_next=DsubOmegaLinv.dot((1-w)*D+w*U).dot(x0)+w*DsubOmegaLinv.dot(b)
# error check
error=norm(b-dot(A,x_next),2)/norm(b,2)
errors.append(error)
if error<tol:
return x_next,np.array(errors)
else:
x0=x_next
- 验证
import numpy as np
from formu_lib import *
A=np.array([[2,-1,0],
[-1,3,-1],
[0,-1,2]])
b=np.array([1,8,-5])
extractVal=np.array([2,3,-1])
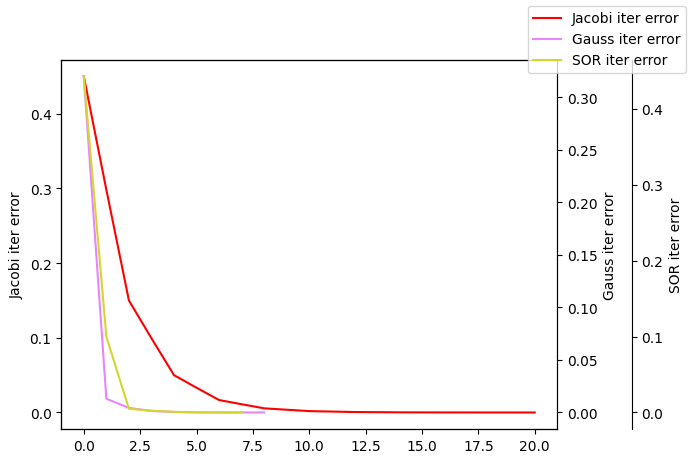
x1,er1=JacobiIter(A,b)
x2,er2=GaussIter(A,b)
x3,er3=SORIter(A,b,1.2)
ind1,ind2,ind3=list(range(len(er1))),list(range(len(er2))),list(range(len(er3)))
plotLines([ind1,ind2,ind3],[er1,er2,er3],["Jacobi iter error","Gauss iter error","SOR iter error"])
showError(x1,extractVal)
showError(x2,extractVal)
showError(x3,extractVal)
# 雅可比迭代法
数值解: [ 1.9999746 2.99999435 -1.0000254 ],
精确解: [ 2 3 -1],
误差: 9.719103983280175e-06
# GS迭代法
数值解: [ 1.9999619 2.9999746 -1.0000127],
精确解: [ 2 3 -1],
误差: 1.2701315856479742e-05
# SOR迭代法
数值解: [ 2.00001461 2.999993 -1.00000098],
精确解: [ 2 3 -1],
误差: 4.338862621105977e-06
正定对称线性方程组的不定常迭代:最速下降法,共轭梯度法
def SPDmethodSolve(A:np.ndarray,
b:np.ndarray,
tol:float=1e-5,
maxIter:int=200)->Tuple[np.ndarray,np.ndarray]:
"""使用最速下降法求解线性方程组Ax=b
input:
A: np.ndarray, 系数矩阵,必须是对称正定矩阵
b: np.ndarray, 右端常数
tol: float, 误差限
maxIter: int, 最大迭代次数
output:
x: np.ndarray, 解向量
errors: np.ndarray, 误差序列
"""
from numpy import dot
from numpy.linalg import norm
x0=np.zeros(b.shape)
i,errors=0,[]
while True :
if i>maxIter:
maxIter=1.5*maxIter
print(f"迭代次数过多,自动调整为 {maxIter}")
# 计算残量r^k作为前进方向.
r=b-dot(A,x0)
# 计算前进距离a_k
a=InnerProduct(r,r)/InnerProduct(dot(A,r),r)
x_next=x0+a*r
error=norm(b-dot(A,x_next),2)/norm(b,2)
errors.append(error)
if errors[-1]<tol:
return x_next,np.array(errors)
else:
x0=x_next
i+=1
def conjGrad(A:np.ndarray,
b:np.ndarray,
tol:float=1e-5,
maxIter:int=200)->Tuple[np.ndarray,np.ndarray]:
"""使用共轭梯度法求解线性方程组Ax=b
input:
A: np.ndarray, 系数矩阵,必须是对称正定矩阵
b: np.ndarray, 右端常数
tol: float, 误差限
maxIter: int, 最大迭代次数
output:
x: np.ndarray, 解向量
errors: np.ndarray, 误差序列
"""
from numpy import dot
from numpy.linalg import norm
# 选择初值x0,初始方向p0=r0=b-Ax0
x0=np.zeros(b.shape)
i,errors=0,[]
r0=b-dot(A,x0)
p_0=b-dot(A,x0)
errors.append(norm(r0,2)/norm(b,2))
while True :
if i>maxIter:
maxIter=1.5*maxIter
print(f"迭代次数过多,自动调整为 {maxIter}")
# 计算a_k,x^{k+1}=x_k+a_k*p_k
a_k=InnerProduct(r0,p_0)/InnerProduct(dot(A,p_0),p_0)
x_next=x0+a_k*p_0
# 计算下一步的残量
r_k_next=b-dot(A,x_next)
errors.append(norm(r_k_next,ord=2)/norm(b,2))
# 如果残量足够小,则停止迭代
if errors[-1]<tol:
return x_next,np.array(errors)
else:
# 计算下一步的搜索方向
beta_k=-1*InnerProduct(r_k_next,A.dot(p_0))/InnerProduct(p_0,A.dot(p_0))
p_0=r_k_next+beta_k*p_0
x0=x_next
i+=1
- 验证
from formu_lib import *
import numpy as np
A=np.array([[4,-1,0],
[-1,4,-1],
[0,-1,4]])
b=np.array([3,2,3])
extractVal=np.array([1,1,1])
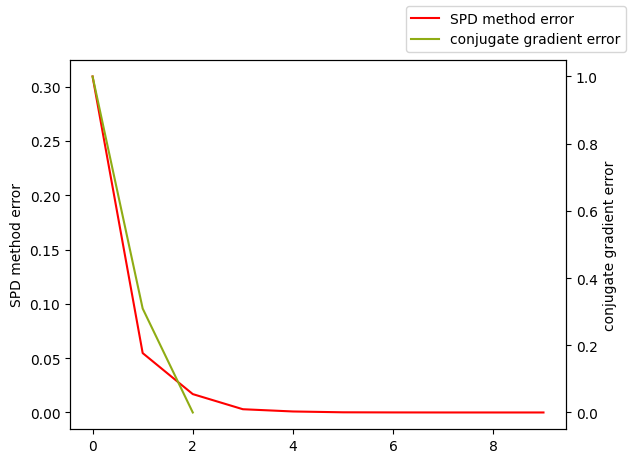
x1,er1=SPDmethodSolve(A,b,1e-6)
x2,er2=conjGrad(A,b,1e-6)
plotLines([list(range(len(er1))),list(range(len(er2)))],[er1,er2],["SPD method error","conjugate gradient error"])
showError(x1,extractVal)
showError(x2,extractVal)
# SPD method
数值解: [0.99999951 0.99999951 0.99999951],
精确解: [1 1 1],
误差: 4.891480784863234e-07
# conjugate gradient method
数值解: [1. 1. 1.],
精确解: [1 1 1],
误差: 0.0
【数值计算方法】线性方程组迭代算法的Python实现的更多相关文章
- 多线性方程组迭代算法——Gauss-Seidel迭代算法的Python实现
多线性方程组(张量)迭代算法的原理请看这里:原理部分请留言,不方便公开分享 Jacobi迭代算法里有详细注释:多线性方程组迭代算法——Jacobi迭代算法的Python实现 import numpy ...
- 多线性方程组迭代算法——Jacobi迭代算法的Python实现
多线性方程(张量)组迭代算法的原理请看这里:若想看原理部分请留言,不方便公开分享 Gauss-Seidel迭代算法:多线性方程组迭代算法——Gauss-Seidel迭代算法的Python实现 impo ...
- 线性方程组迭代算法——Gauss-Seidel迭代算法的python实现
原理: 请看本人博客:线性方程组的迭代求解算法——原理 代码: import numpy as np max=100#迭代次数上限 Delta=0.01 m=2#阶数:矩阵为2阶 n=3#维数:3X3 ...
- 线性方程组迭代算法——Jacobi迭代算法的python实现
原理: 请看本人博客:线性方程组的迭代求解算法——原理 代码: import numpy as np max=100#迭代次数上限 Delta=0.01 m=2#阶数:矩阵为2阶 n=3#维数:3X3 ...
- 蒙特·卡罗算法的Python实现
一 背景 此算法诞生的背景是: 曼哈顿计划,有极大的计算需求. 计算机刚开始发展,最适合做计算. 蒙特卡洛算法理论基础是概率论,实际就是暴力计算逼近理想结果.正是在以上两个背景下,它刚好得到了极大的应 ...
- 常用排序算法的python实现和性能分析
常用排序算法的python实现和性能分析 一年一度的换工作高峰又到了,HR大概每天都塞几份简历过来,基本上一天安排两个面试的话,当天就只能加班干活了.趁着面试别人的机会,自己也把一些基础算法和一些面试 ...
- 数据关联分析 association analysis (Aprior算法,python代码)
1基本概念 购物篮事务(market basket transaction),如下表,表中每一行对应一个事务,包含唯一标识TID,和购买的商品集合.本文介绍一种成为关联分析(association a ...
- 机器学习算法与Python实践之(四)支持向量机(SVM)实现
机器学习算法与Python实践之(四)支持向量机(SVM)实现 机器学习算法与Python实践之(四)支持向量机(SVM)实现 zouxy09@qq.com http://blog.csdn.net/ ...
- 机器学习算法与Python实践之(五)k均值聚类(k-means)
机器学习算法与Python实践这个系列主要是参考<机器学习实战>这本书.因为自己想学习Python,然后也想对一些机器学习算法加深下了解,所以就想通过Python来实现几个比较常用的机器学 ...
- 机器学习算法与Python实践之(七)逻辑回归(Logistic Regression)
http://blog.csdn.net/zouxy09/article/details/20319673 机器学习算法与Python实践之(七)逻辑回归(Logistic Regression) z ...
随机推荐
- 【Vue】vue项目搭建、ES6的简单使用(大觅)
目录 项目搭建与基本配置 项目搭建 安装淘宝NPM镜像 cnpm 安装webpack 新建项目 运行项目 运行时出现的一些问题和解决方案 框架安装 安装UI框架iView 引入UI框架iView 引入 ...
- arch 输入法
输入法配置 输入法采用fcitx + Sogou的组合,安装需要的包: yay -S fcitx fcitx-im fcitx-configtool fcitx-sogoupinyin 然后写一个fc ...
- vue 控件的淡入淡出
页面代码. 1.首先要用transition 包裹一下,设置name或者不设置都可以,其次transition 下面要有一个div设置v-if来触发移入移出 <transition name=& ...
- [转]关于opencv4.0中“未定义标识符cvNamedWindow”的解决方法
这个问题困扰了很久,在网上找了很多方法,但是都没用, 比如:"在代码开头加入头文件#include <opencv2/highgui/highgui_c.h>"之类的方 ...
- 20. C++快速入门--并发基础
参考:<Professional c++>,<并发编程实战> 1 基本概念 1.1 竞争 原子性 "原子"(atomic)操作是指一种不可分割的操作, 即在 ...
- 解密prompt系列46. LLM结构化输出代码示例和原理分析
最近闭源大模型们都陆续支持结构化输出,这一章我们先结合demo看下开源和闭源对结构化输出的支持,随后会介绍Constrained Decoding和Format Restricting Instruc ...
- Python依赖库的导入、导出 | 解决内网安装模块问题 | Python
通过在有网的机器A下下载所有的依赖包至package文件夹下: pip3 download -r requirements.txt -d ./package 将依赖包移动至没有网的机器B下,指定依赖包 ...
- 微服务实战系列(十)-网关高可用之中间件Keepalived-copy
1.场景描述 因为要做网关的高可用,用到了keepalived+nginx,来保证nginx的高可用,如下图: 安装了keepavlived,走了一些弯路,记录下吧,nginx的安装就不多说了,博客已 ...
- 阿里云产品之数据中台架构-copy
1. 场景描述 客户打包买了很多阿里云的产品,但是阿里云不负责实施,基于阿里云产品与客户需求,拟采用的数据中台架构,有类似需求的,可以参考下,拿走不谢! 2. 解决方案 阿里产品大数据架构图: 从下到 ...
- MySQL安装及基本使用教程
yanzilove win10下安装配置mysql环境 一.下载从https://dev.mysql.com/downloads/mysql/5.1.html#downloads下载zip包,这里 ...