计算机视觉中由基本矩阵F或者本质矩阵E计算摄像机投影矩阵时,经常提到“相差一个尺度因子”的含义
在通过二维像素坐标恢复三维坐标的过程中,经常出现这个齐次坐标系、尺度不变性的概念。这篇博客讲的比较好。
一、关于齐次坐标系的直观感受
在我们的世界里,两平行线是永远不会相交的,但是在投影空间里,两条平行线在无穷远处是相交的,如这个铁轨一样:
在数学里,我们通过齐次变换来表示这种问题,齐次变换就是将一个原本是n维的向量用一个n+1维向量来表示。
为了制作二维齐次坐标,我们只需在现有坐标中添加一个额外的变量 w。 因此,笛卡尔坐标中的点 (X, Y) 变为齐次坐标中的 (x, y, w),这两个坐标描述的是同一点。 为了将齐次坐标 (x, y, w) 转换为笛卡尔坐标,我们只需将 x 和 y 除以 w: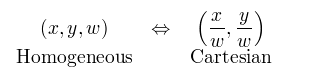
例如,笛卡尔坐标系下(1,2)的齐次坐标可以表示为(1,2,1),如果点(1,2)移动到无限远处,在笛卡尔坐标下它变为(∞,∞),然后它的齐次坐标表示为(1,2,0),因为(1/0, 2/0) = (∞,∞),我们可以不用”∞”来表示一个无穷远处的点了。
二、关于其次坐标的尺度不变性
转化齐次坐标到笛卡尔坐标的过程中,我们可以发现: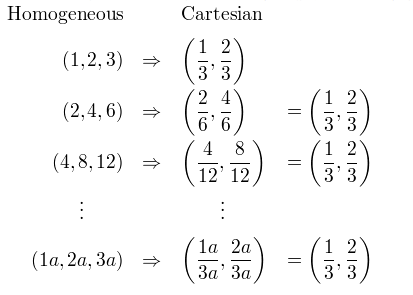
齐次坐标系点 (1, 2, 3), (2, 4, 6) 和 (4, 8, 12) 对代表欧几里得空间(或笛卡尔空间)中的同一点(1/3, 2/3)。
三、相差一个尺度因子的含义
在SLAM或者其它视觉感知的问题中常常会出现这样子的齐次坐标系构成的等式,如: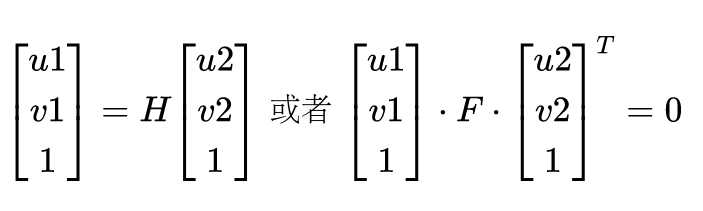
其中H或E为一个三乘以三的矩阵,应该有9个变量。这个时候经常会看到一句话,说由于尺度等价性,H或E只有8个自由度,这是什么意思呢?
上式的(u, v, 1)为齐次坐标,其乘以任意常数意义不变(等式依然成立),对应的H或E也应该满足这一点。说得更加具体一点,H或E可以有无数解,但这些解都是倍数关系,例如H或E的解可以为: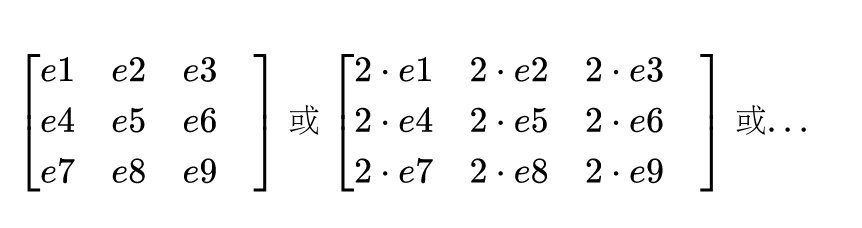
这么多解肯定不是我们想要的,所以我们进行一个归一化,规定H或E矩阵的最后一个元素的值为1,这样我们的解就唯一了。
至于为什么叫做“尺度等价性”,因为我们将这个值设置为1对应到真实世界中的长度可能是5cm,也可能是40m,这就需要额外的深度信息介入进行确定,这个以t的长度作为单位的尺度世界只和真实世界之间相差一个“尺度因子”。
所以我们在计算的时候说,由于“尺度不变性”,该三乘以三的矩阵有八个自由度(也就是有8个元素是未知量),还有一个元素作为尺度被设置为1(这个1乘以一个“尺度因子”就是实际的尺度)。
计算机视觉中由基本矩阵F或者本质矩阵E计算摄像机投影矩阵时,经常提到“相差一个尺度因子”的含义的更多相关文章
- Android OpenGL ES(六)----进入三维在代码中创建投影矩阵和旋转矩阵
我们如今准备好在代码中加入透视投影了. Android的Matrix类为它准备了两个方法------frustumM()和perspectiveM(). 不幸的是.frustumM()的个缺陷,它会影 ...
- OpenGL中投影矩阵基础知识
投影矩阵元素Projection Matrix 投影矩阵构建: 当f趋向于正无穷时: 一个重要的事实是,当f趋于正无穷时,在剪裁空间中点的z坐标跟w坐标相等.计算方法如下: 经过透视除法后,z坐标变为 ...
- 介绍Unity中相机的投影矩阵与剪切图像、投影概念
这篇作为上一篇的补充介绍,主要讲Unity里面的投影矩阵的问题: 上篇的链接写给VR手游开发小白的教程:(三)UnityVR插件CardboardSDKForUnity解析(二) 关于Unity中的C ...
- NumPy之计算两个矩阵的成对平方欧氏距离
问题描述 设 \({X_{m \times k}} = \left[ {\vec x_1^T;\vec x_2^T; \cdots ;\vec x_m^T} \right]\) (; 表示纵向连接) ...
- OpenGL中投影矩阵的推导
本文主要是对红宝书(第八版)第五章中给出的透视投影矩阵和正交投影矩阵做一个简单推导.投影矩阵的目的是:原始点P(x,y,z)对应后投影点P'(x',y',z')满足x',y',z'∈[-1,1]. 一 ...
- [Deep-Learning-with-Python]计算机视觉中的深度学习
包括: 理解卷积神经网络 使用数据增强缓解过拟合 使用预训练卷积网络做特征提取 微调预训练网络模型 可视化卷积网络学习结果以及分类决策过程 介绍卷积神经网络,convnets,深度学习在计算机视觉方面 ...
- (转)思考:矩阵及变换,以及矩阵在DirectX和OpenGL中的运用问题:左乘/右乘,行优先/列优先,...
转自:http://www.cnblogs.com/soroman/archive/2008/03/21/1115571.html 思考:矩阵及变换,以及矩阵在DirectX和OpenGL中的运用1. ...
- hession矩阵的计算与在图像中的应用
参考的一篇博客,文章地址:https://blog.csdn.net/lwzkiller/article/details/55050275 Hessian Matrix,它有着广泛的应用,如在牛顿方法 ...
- 计算机视觉中的边缘检测Edge Detection in Computer Vision
计算机视觉中的边缘检测 边缘检测是计算机视觉中最重要的概念之一.这是一个很直观的概念,在一个图像上运行图像检测应该只输出边缘,与素描比较相似.我的目标不仅是清晰地解释边缘检测是怎样工作的,同时也提 ...
- 一个N*M的矩阵,找出这个矩阵中所有元素的和不小于K的面积最小的子矩阵
题目描述: 一个N*M的矩阵,找出这个矩阵中所有元素的和不小于K的面积最小的子矩阵(矩阵中元素个数为矩阵面积) 输入: 每个案例第一行三个正整数N,M<=100,表示矩阵大小,和一个整数K 接下 ...
随机推荐
- 微宏科技基于 KubeSphere 的微服务架构实践
作者:尹珉,KubeSphere Ambassador.contributor,KubeSphere 社区用户委员会杭州站站长. 公司简介 杭州微宏科技有限公司于 2012 年成立,专注于业务流程管理 ...
- mysql主从复制详细部署
1.异步复制:这是MySQL默认的复制模式.在这种模式下,主库在执行完客户端提交的事务后会立即将结果返回给客户端,并不关心从库是否已经接收并处理.这种模式的优点是实现简单,但缺点是如果主库崩溃,已经提 ...
- vue 父子组件之间传值
在vue中父子组件传值是必不可少的,大家必须要学会! 首先父组件向子组件传值: 父组件:比如我们传teacher为index,如果我们传值变量可以使用 : 绑定我们在data中定义的变量. 子组件:为 ...
- 全中国有多少公网IP地址?
之前为了准备CTF比赛,搞了一个云服务器,顺便申请了一个公网IP. 看着申请到的IP地址,我突然想到了一个问题:不是早就说IP地址已经耗尽了吗,为什么我随便就能申请到,是谁在负责IP地址的管理分配,咱 ...
- Redis工具可视化工具Redis Desktop Manager(附安装包)
前言 redis工具,我相信每个开发都需要,如果每次查都去client执行指令,我怕查完之后,老大就要发版咯.我之前一直用的Redis可视化工具RedisDesktopManager,总觉得差点意思, ...
- 3.18 Linux懒人神器:命令自动补全功能!
文件名(或者目录名)是执行 linux 命令中最常见的参数,例如前面介绍的 cd.mkdir.cp 等命令,都涉及到了文件名.然而对初学者来说,输入完整的文件名感觉很麻烦,尤其面临文件名(目录名)特别 ...
- 安卓微信小程序开发之“蓝牙”
一.写在前面 在微信当中是支持两种蓝牙模式,分别是"经典蓝牙--BT"和"低功耗蓝牙--BLE".通常在和外围单片机设备进行连接的时候用的是低功耗蓝牙这个模式, ...
- 解决MobaXterm自动断开连接,亲测有效~
场景: 使用MobaXterm工具通过SSH连接Linux服务器,如果一段时间没有操作,MobaXterm会把连接自动断开,这个设定很是不方便.通过更改下面的设置可以使SSH保持长连接,不会自动断开.
- OpenCV开发笔记(八十二):两图拼接使用渐进色蒙版场景过渡缝隙
前言 对于图像拼接,前面探讨了通过基于Stitcher进行拼接过渡和基于特征点进行拼接过渡,这2个过渡的方式是摄像头拍摄角度和方向不应差距太大. 对于特定的场景,本身摄像头拍摄角度差距较大,拉伸 ...
- Nuxt.js 应用中的 schema:written 事件钩子详解
title: Nuxt.js 应用中的 schema:written 事件钩子详解 date: 2024/11/15 updated: 2024/11/15 author: cmdragon exce ...