ROS教程2 编写简单的消息发布器和订阅器 (C++ catkin)
创建工作环境
创建文件夹,创建包
mkdir -p ~/catkin_arduino_ros/src catkin_create_pkg test1_pub_sub std_msgs rospy roscpp
在桌面打开终端,添加工作路径
echo "source /home/dongdong/catkin_arduino_ros/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
创建项目文件
1创建src/talker.cpp文件
cd ~/catkin_arduino_ros/src
gedit talker.cpp
复制代码
#include "ros/ros.h"
#include "std_msgs/String.h" #include <sstream> int main(int argc, char **argv)
{ ros::init(argc, argv, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0;
while (ros::ok())
{ std_msgs::String msg; std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep();
++count;
} return 0;
}
保存
2创建src/listener.cpp文件
gedit listener.cpp
复制源代码
#include "ros/ros.h"
#include "std_msgs/String.h" void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
} int main(int argc, char **argv)
{ ros::init(argc, argv, "listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); ros::spin(); return 0;
}
编译节点
更改编译文件
在CMakeLists.txt文件末尾加入几条语句:
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
编译
cd ~/catkin_arduino_ros/
catkin_make
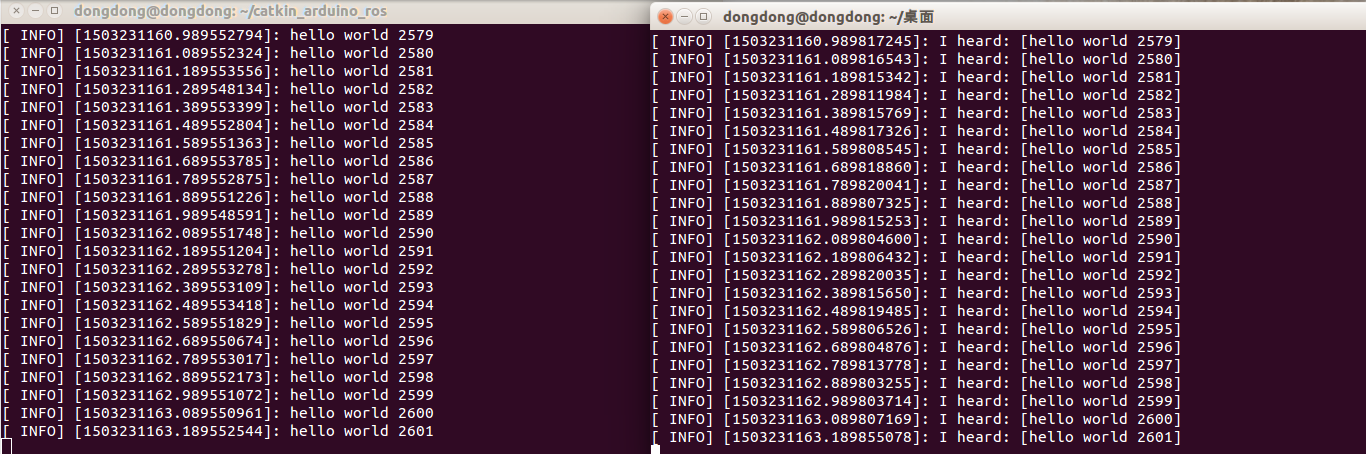
运行节点
//分别打开三个窗口
roscore rosrun test1_pub_sub talker rosrun test1_pub_sub listener
ROS教程2 编写简单的消息发布器和订阅器 (C++ catkin)的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习(十二)—— 编写简单的消息发布器和订阅器(C++)
一.创建发布器节点 1 节点功能: 不断的在ROS网络中广播消息 2 创建节点 (1)打开工作空间目录 cd ~/catkin_ws/src/beginner_tutorials 创建一个发布器节点( ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- ROS 消息发布器和订阅器Publisher, Subscriber
博客参考:https://www.2cto.com/kf/201705/639776.html 1.编写发布器节点节点(Node) 是指 ROS 网络中可执行文件.接下来,将会创建一个发布器节点(“t ...
- ROS:消息发布器和订阅器(c++)
学习资料主要源自http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 $ roscd beginner_t ...
- 用C++编写发布器和订阅器节点
1.转移到之前教程在catkin工作空间所创建的package路径下: $ roscd package_name/ 例子:$ roscd practice/2.在package路径下创建src目录: ...
- 编写简单的ramdisk(选择IO调度器)
前言 目前linux中包含anticipatory.cfq.deadline和noop这4个I/O调度器.2.6.18之前的linux默认使用anticipatory,而之后的默认使用cfq.我们在前 ...
- ROS手动编写消息发布器和订阅器topic demo(C++)
1.首先创建 package cd ~/catkin_ws/src catkin_create_pkg topic_demo roscpp rospy std_msgs 2. 编写 msg 文件 cd ...
随机推荐
- 【github&&git】4、git常用命令(持续更新中)
git常用命令(持续更新中) 本地仓库操作git int 初始化本地仓库git add . ...
- 写出java8实现对List<User>中的username字段过滤出不等于张三的数据
写出java8实现对List<User>中的username字段过滤出不等于张三的数据... 对...这个是一道面试题.当时没有看过java8的新特性...所以有点懵. 看完之后感觉 真. ...
- DOM事件-调用函数
通过调用函数改变其内容: <!DOCTYPE html> <html lang="en" dir="ltr"> <head> ...
- Code::Blocks + GDAL
[root@server20 ~]# yum install cmake cmake-gui [root@server20 ~]# yum install cairo-devel libcurl-de ...
- 对比学IT---路由器和linux流量统计的差别
1. 路由器使用MQC来统计端口入出方向,特定特征的数据流. 显示policy 的统计信息 配置policy: #traffic classifier vlan5traffic operator an ...
- JMeter 利用Jmeter批量数据库插入数据
利用Jmeter批量数据库插入数据 by:授客 QQ:1033553122 1. 启动Jmeter 2. 添加 DBC Connection Configuration 右键线程组-> ...
- Android常用学习网站
http://blog.csdn.net/liang5630/article/details/43482691 https://github.com/Trinea/android-open-proje ...
- HTTP的Referrer和Referrer Policy设置
Referrer referrer是HTTP请求header的报文头,用于指明当前流量的来源参考页面.通过这个信息,我们可以知道访客是怎么来到当前页面的.这对于Web Analytics非常重要,可以 ...
- [20170705]diff比较执行结果的内容.txt
[20170705]diff比较执行结果的内容.txt --//有时候需要比较2个命令输出的结果进行比较,比较笨的方法如下,例子: $ lsnrctl status LISTENER_SCAN2 & ...
- asp.net webapi 自定义身份验证
/// <summary> /// 验证 /// </summary> /// Account API账号 /// TimeStamp 请求时间 /// Sign 所有请求参数 ...