MI200e电力线通讯
最近做课设,选了电力线通讯这种途径,经过百度google等一番查询,最终敲定了mi200e这块国产芯片。
课设要求就是双机通讯,互传传感器信息以及模拟一个时钟
然后淘宝买了拆机的成品,我拿回来把mcu拆了然后飞出通讯端口和stm8交互。现在串口两边可以通讯了,下一步就是重新绘制一块完整的pcb,然后制版,并实现响应功能。
先上ref:
http://search.eefocus.com/s?app_id=90&sub=1&q=mi200e
这是电路城搜索mi200e得出的结果,我主要参考第一篇,他在嘉立创还有发帖,点进去你就找得到了。
他使用stm8主控并绘制整块pcb,我则使用以前的stm8核心小板。由于mi200e常规供电为5v,稍稍更改核心板为5v供电做好。
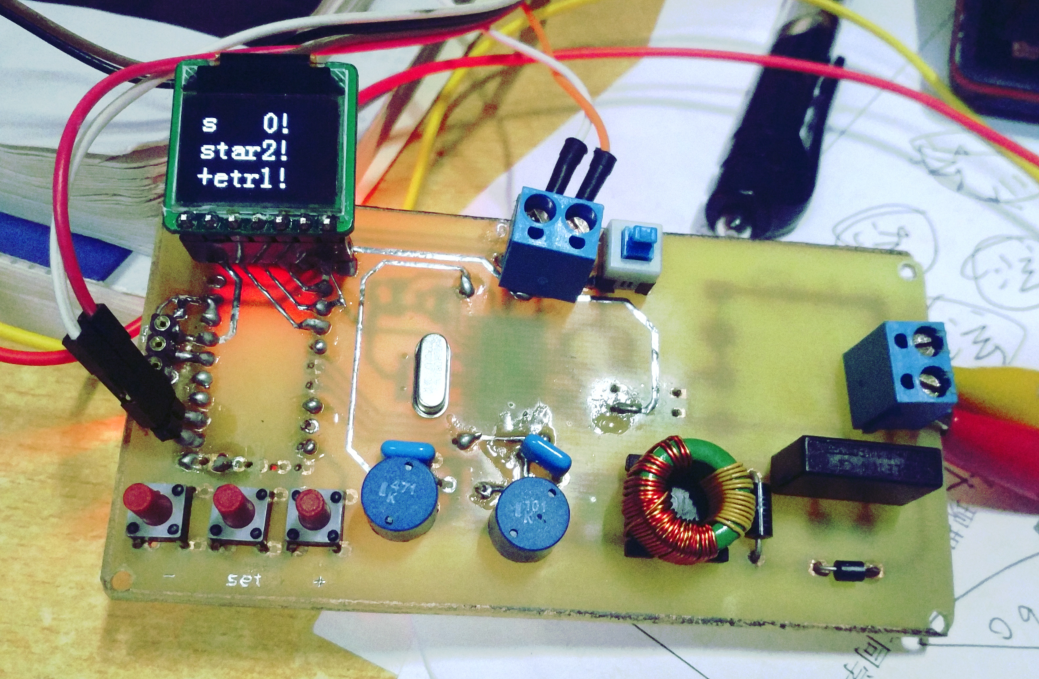
没有拍当时做的图片,上pcb和实物吧!

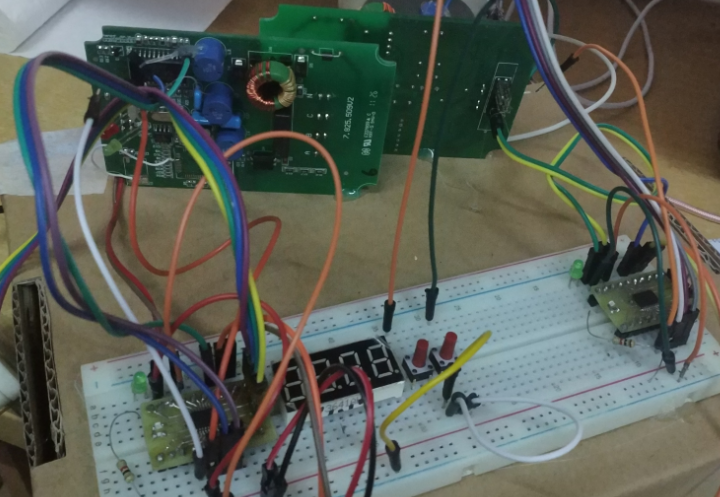
将右图放大后,可看到两块绿板,这两块就是成品模块,应用于智能抄表的。可看到左边那块上有一根小跳线,跳线右边哪里原来是块u,我用烙铁把他拆了。
不然stm8没法单独和mi200e通讯。至于为什么要跳那根线,我在网上恰好查到他的原理图,(应该是miartech官方的方案,然后抄的,原件丝印不同),mi200e的供电vdd受一个pmos控制,
所以直接将mos的g级接地。其实我买了两种,一共买了四块,连运费20+rmb。另一种的丝印是和原理图队上的。我后面会附上手头的资料。
两块板子背面其实有排针,原来用于接220v的,我直接把他们并联在一起,然后接了一根电源线。一方面因为我电源线紧张,另一方面固定在一块纸板上方便调试。

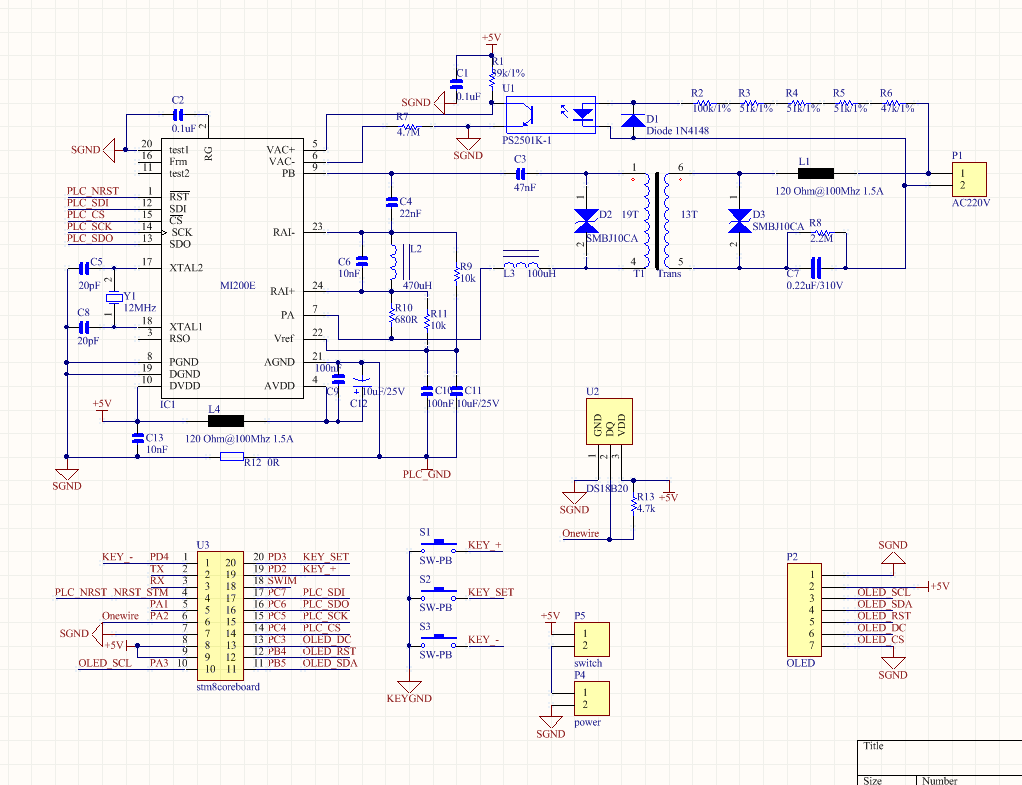
这是原理图,通讯接口是SPI,其中cs不能直接接地,因为数据是双向互传,并且不是单次传输。具体参考SPI接口flash的cs为什么不能直接接地吧。
我一开始想省io直接接地,结果调试的时候发现,自检过不了。
至于rst引脚,我把它接到stm8的nrst恰好可以使用,虽然官方应用笔记里面说要低电平1s后拉高。留待后面再测试吧。
这样就是4个io就能交互了。
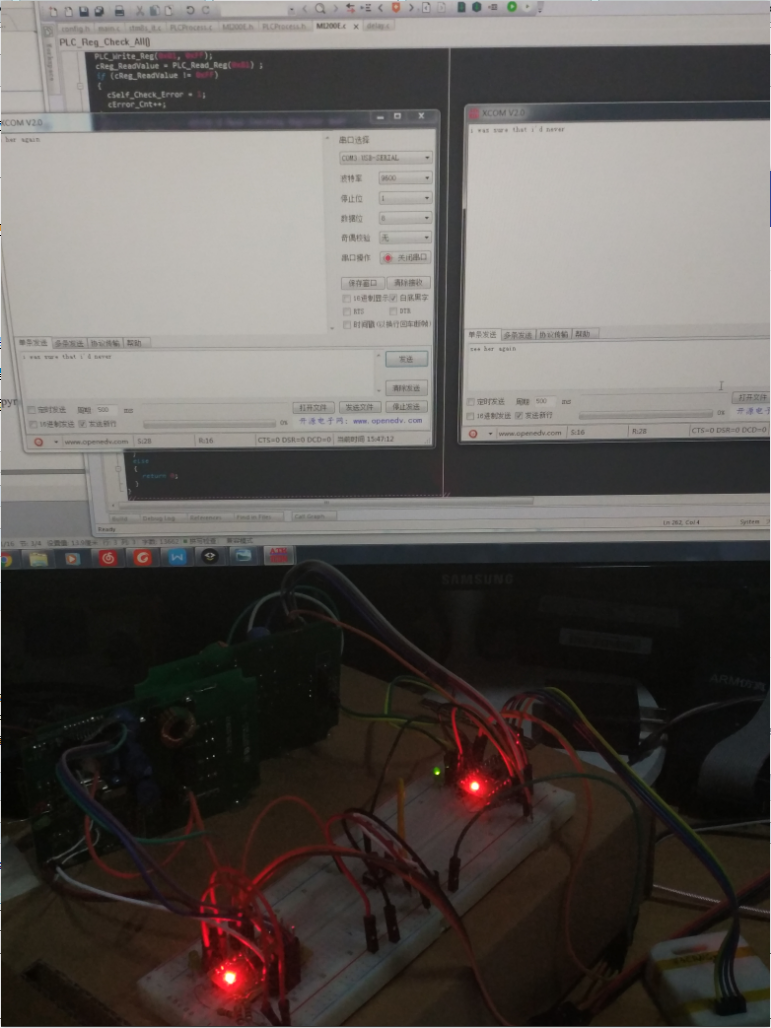
然后我按照嘉立创那篇帖子里的方案做了,然后一直调试,发现他的程序我直接用不了,数据通。
然后我发现省略了crc校验初步数据能够发送,但是有毛病。
没办法,又看手册,看应用笔记。以及对比另一个c51版本的程序
,这个程序从我给的链接里的第二篇可以下载到。但是这个只是驱动,应该就是这个产品用到的,但是没给全程序。我猜嘉立创那篇帖主
也是参考这个改的,因为驱动大体一致。我同时看笔记,以及两篇驱动,最后经过一番修改,然后下进去竟然就可以工作了。
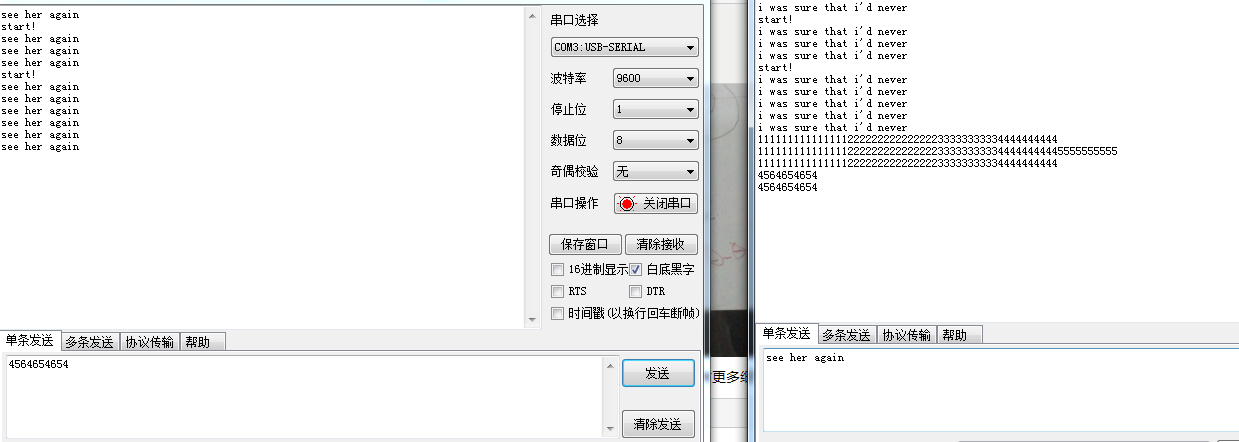
程序限制它64字节,对于一般应用足够了。
说一下这块芯片的发送过程,两个引导字节(一个字),一个固定字节,然后配置字节(速率和字长,字为单位)。到这里都是固定200/240bps速率(会因交流电频率不同而不同),之后的速率可自行配置,
程序里设定的是1600/1920bps。然后是以字为单位的数据(这里就是串口透传,由于是字对齐,所以必须是偶数字节,这里要注意!),最后一个字的CRC校验。
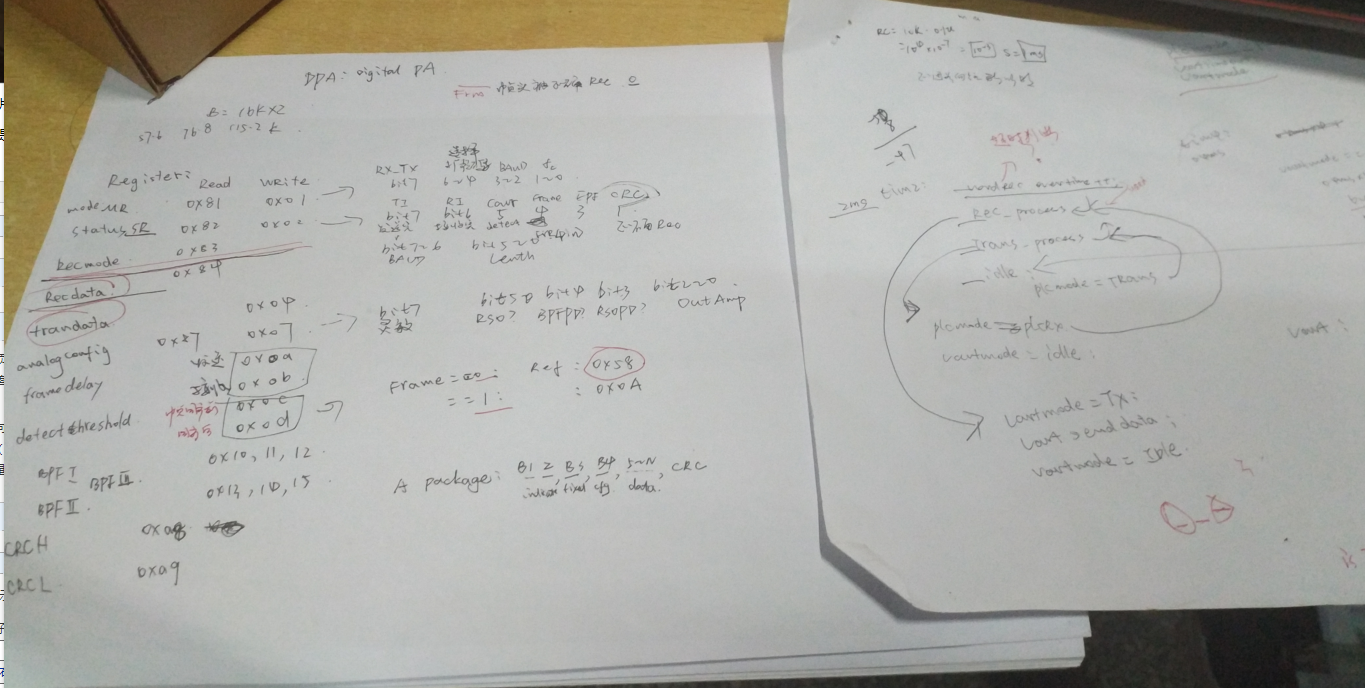
附上一张笔记图,看别人的代码真是不容易啊。这里双向能通讯了,后面再看要不要他程序的框架,如果要,还有更多细节要明白。
和硬件打交道,如果不懂的话,可能就是一个延时你就要消耗大把时间。所以需要日积月累!
#include "stm8s.h"
#include "config.h"
#include "MI200E.h"
#include "PLCProcess.h" unsigned char g_cStatusReg;
unsigned char g_cRecModCfgReg;
unsigned short PLC_Word_Rec_Overtime;
unsigned char g_bRecv_Pkg_Flag;
unsigned char g_CRC_H,g_CRC_L;
unsigned char g_cPkg_Length = ;
unsigned char g_Pkg_Indication_Byte = ;
unsigned char g_cTrans_Step;
unsigned char g_cRecv_Step;
unsigned char g_cRecByte_H;
unsigned char g_cRecByte_L;
unsigned char g_cSend_Data_Length;
unsigned char g_cSend_Byte_Cnt;
unsigned char g_cRecv_Byte_Cnt;
unsigned char g_Send_Buf[];
unsigned char g_Recv_Buf[]; void PLC_Send_Frame(unsigned char cWRData_H, unsigned char cWRData_L)
{
PLC_Write_Reg(PLCAddrWRSR,(g_cStatusReg&0x7F)); //Clear TI;Write Status Register:0x02
MI200E_SCK_0;
MI200E_CS_0;
Write_SPI(PLCAddrWRTB0); //Write Sending Byte Register 0:0x04
Write_SPI(cWRData_H);
Write_SPI(cWRData_L);
MI200E_SCK_0;
MI200E_CS_1;
} void PLC_RD_Recv_Word(void)
{
MI200E_SCK_0;
MI200E_CS_0;
Write_SPI(PLCAddrRDRB0); //Read Receiving Byte Register 0:0x84
g_cRecByte_H = Read_SPI();
g_cRecByte_L = Read_SPI();
MI200E_SCK_0;
MI200E_CS_1;
} unsigned char PLC_Clear_EPF(void)
{
unsigned char cStatusByte; cStatusByte = PLC_Read_Reg(PLCAddrRDSR); //Read Status Register:0x82
PLC_Write_Reg(PLCAddrWRSR, (cStatusByte&0xF5)); //Clear EPF Flag & CRC_Flag;Write Status Register:0x02
return(cStatusByte);
} void PLC_Transmit_Process(unsigned char* ptrData_Buffer)
{
unsigned char cStatusByte; cStatusByte = PLC_Read_Reg(PLCAddrRDSR); //Read status register
if((cStatusByte&0x80) != 0x80)
{
return;
}
g_cStatusReg = cStatusByte;//**confirmed
switch(g_cTrans_Step)
{
case :
//Write Mode Cfg Reg, Code Length = 32, Data Rate = 200 bps;
PLC_Write_Reg(PLCAddrWRMR, 0x0D); //**0x0d changed to 0x0c;diff:carriar freq:76.5->57.6khz
PLC_Send_Frame(0xFF, 0xFF); //First 2 Byte:0xFF 0xFF
//Baud=1600bps + length(unit in words)
g_Pkg_Indication_Byte = (0x00 + g_cSend_Data_Length/ + );//**why finially +2??
g_cTrans_Step = ;
break;
case :
//Initial CRC Bit;Write Status Register:0x02
PLC_Write_Reg(PLCAddrWRSR,(g_cStatusReg & 0xFD));
//Send Header Byte:0x1a & Packet Indication Byte
PLC_Send_Frame(0x1A, g_Pkg_Indication_Byte);
g_cTrans_Step = ;
break;
case :
//Write mode configuration;
PLC_Write_Reg(PLCAddrWRMR,0x01);//0b0000 00--1600/1920bps 01--76.8khz**00 57.6k
//Send 0x1f,0xff as MiarTech's PLC AMR Applications
PLC_Send_Frame(0x1F,0xFF);//**the word??
g_cTrans_Step = ;
g_cSend_Byte_Cnt = ;
break;
case ://Send Data(Unit in Word:16 Bytes)
if(g_cSend_Byte_Cnt >= (g_cSend_Data_Length - ))
{
g_cTrans_Step = ;
}
PLC_Send_Frame(*ptrData_Buffer,*(ptrData_Buffer + ));
g_cSend_Byte_Cnt = g_cSend_Byte_Cnt + ;//point to the next word
delay_us();//delay 50us and read crc
g_CRC_H = PLC_Read_Reg(PLCAddrRD_CRC_H);
g_CRC_L = PLC_Read_Reg(PLCAddrRD_CRC_L);
break;
case ://Send CRC Code:16 Bytes
PLC_Send_Frame(g_CRC_H, g_CRC_L);
g_cTrans_Step = ;
break;
case ://transmit finished 0x81
PLC_Write_Reg(PLCAddrWRMR, 0x81); //Write mode configuration,
g_cRecByte_H = ;
g_cRecByte_L = ;
g_cRecv_Step = 0x00;
PlcRunMode = PLCRX;
UartRunMode = IDLE;
break;
default:
break;
}
} void PLC_Receive_Process(unsigned char* ptrData_Buffer)
{
unsigned char cStatusByte;
unsigned char CRC_Correct_Flag;
// unsigned char temp,i;
// static unsigned short cnt; if(g_cRecv_Step == 0x10)//Receive Process Initialization OK
{
g_cRecModCfgReg = PLC_Read_Reg(PLCAddrRDRR); //Read Receiving Mode Configuration Register(0x83)
cStatusByte = PLC_Read_Reg(PLCAddrRDSR);
if(g_cRecModCfgReg != 0x00) //Have Received Spread Spectrum&Packet Length
{
PLC_Write_Reg(PLCAddrWRRR,0x00); //Clear Receiving Mode Configuration Byte
g_cPkg_Length = (0x3f & g_cRecModCfgReg); //Packet Length = g_cRecModCfgReg[5:0]
g_cRecv_Step = 0x01;
PLC_Word_Rec_Overtime = ;
}
if(((cStatusByte & 0x30) != 0x30)||(PLC_Word_Rec_Overtime > )) //Receive Overtime >=1 Second
{
CRC_Correct_Flag = PLC_Clear_EPF();
g_cRecv_Step = 0x00;
return;
}
}
else if(g_cRecv_Step == 0x00)
{ //0x81
PLC_Write_Reg(PLCAddrWRMR, 0x81);//bit[0]--bit[3] 00--1600/1920bps 01--76.8khz
cStatusByte = PLC_Read_Reg(PLCAddrRDSR);
g_cStatusReg = cStatusByte;
if((g_cStatusReg & 0x20 ) == 0x20)//Read Carrier Detected Flag
{
if((g_cStatusReg & 0x10) == 0x10)//Read Frame Indicate Flag
{
//Clear Receiving Mode Configuration Byte
//PLC_Write_Reg(PLCAddrWRRR, 0x00);//datasheet??
g_bRecv_Pkg_Flag = ;//*(*?
g_cRecv_Step = 0x10;
PLC_Word_Rec_Overtime = ;
}
}
}
else
{
cStatusByte = PLC_Read_Reg(PLCAddrRDSR);
g_cStatusReg = cStatusByte; //Carrier Detected & Frame Indicate Flag is not Correct
if(((cStatusByte & 0x30) != 0x30)||(PLC_Word_Rec_Overtime > ))
{
g_cRecv_Step = 0x00;
CRC_Correct_Flag = PLC_Clear_EPF();
return;
}
else
{
if((cStatusByte & 0x40) == 0x40)//Read Received Interrupt Flag.RI = 1:Received OK
{
PLC_Word_Rec_Overtime = ;
// if(cnt == 0)
{
PLC_Write_Reg(PLCAddrWRSR,((g_cStatusReg & 0xBF)|0x02)); //Clear RI Flag & Set MI200_CRC
}
switch( g_cRecv_Step )
{
case 0x01: //Read 0x1f,0xff as MiarTech's PLC AMR Applications
{
// cnt ++;
// if(cnt > 20)
// {
// cnt = 0;
// g_cRecv_Step = 0x00;
// return;
// }
// temp = PLC_Read_Reg(PLCAddrRDSR);
// if((temp&0x70) != 0x70)
// return;
// cnt = 0;
//
PLC_RD_Recv_Word();
if((g_cRecByte_H == 0x1F) && (g_cRecByte_L == 0xFF))
{
g_cRecv_Step = 0x02;
g_cRecv_Byte_Cnt = ;
}
else
{
g_cRecv_Step = 0x00;
CRC_Correct_Flag = PLC_Clear_EPF();
return;
}
}
break;
case 0x02: //read user data
{
// if(cnt == 0)
// {
// PLC_Write_Reg(PLCAddrWRSR,((g_cStatusReg & 0xBF )|0x02)); //Clear RI Flag & Set MI200_CRC
// }
// cnt ++;
// if(cnt > 20)
// {
// cnt = 0;
// g_cRecv_Step = 0x00;
// return;
// }
// temp = PLC_Read_Reg(PLCAddrRDSR);
// if((temp&0x70) != 0x70)
// return;
// cnt = 0; if(g_cRecv_Byte_Cnt == (g_cPkg_Length - )) //1 for amr;1 for crc
{
g_cRecv_Step = 0x03;
}
PLC_RD_Recv_Word(); *(ptrData_Buffer + g_cRecv_Byte_Cnt) = g_cRecByte_H;
*(ptrData_Buffer + g_cRecv_Byte_Cnt + ) = g_cRecByte_L; g_cRecv_Byte_Cnt++ ;
}
break;
case 0x03: //读取CRC数据
// cnt ++;
// if(cnt > 20)
// {
// cnt = 0;
// g_cRecv_Step = 0x00;
// return;
// }
// temp = PLC_Read_Reg(PLCAddrRDSR);
// if((temp&0x70) != 0x70)
// return;
// cnt = 0; PLC_RD_Recv_Word();
CRC_Correct_Flag = PLC_Clear_EPF();
g_bRecv_Pkg_Flag = ;
if ((CRC_Correct_Flag & 0x02) != 0x00) //CRC Flag Bit = 1;CRC is Correct
{
//串口发送
UartRunMode = TX;
unsigned char txlen;
txlen = (g_cPkg_Length-)*;
UsatrTxSub(g_Recv_Buf,txlen);
UartRunMode = IDLE;
}
g_cRecv_Step = 0x04;
break;
default:
break;
}
}
}
}
} /*******************************************************************************
** End Of File
*******************************************************************************/
主要修改的就是,这个文件了。后面有什么进展还会更新!
10/14日更新!
期间参照它的工程做了修改,重画原理图pcb,然后做手工板。
做了两块,对齐的一般但是能用,只是两块板硬件调试都花了很长时间。
第一块是花原理图的时候中间有个电容连线错了,参照成品一个原件一个原件对,找了很久。由于画图的时候,他在原理图边上,没注意它。
第二块是焊接一个电容,它可能被我烫坏了,造成mi200e经常开机过不了自检,也是图省事全部原件基本都是直接拆的成品上的,最后还是电容一个一个换下来才找到问题。
这里吸取教训,小电容再也不用拆机的!
上图:

实物:
top layer:(其实这面画的是bottom layer)

做出来有两个缺陷,一是该也不该用核心板,该是说方便更换,不该就是焊接很难受,布线也不好看,还变大了,不然可以小不少。
二就是oled,原来考虑是top layer就做最终顶层的,但是寻思直插放另一面合适,最终就把bottom当了顶层。这就导致oled必须换个方向插,
进而就得让它支出来。
目前串口透传OK!距离尚未测试。
按键扫描OK!
OLED显示OK!
DS18b20(暂定传感器)程序写了,尚未测试,拿出以前的18b20插的时候引脚断了,因为生锈了。233
剩下的就是小结构以及模拟一个时钟
更新:2018年11月13日14:05:17
课设快结束了,器件程序调试了好几次,最终基本实现了功能。
调试时遇到主要BUG:
发送的数据不能是奇数字节,不然无法正常通信->改为偶数之后正常
原B板存在MI200E初始化失败情况,反复初始化之后一旦正确就一直正确-> 尝试过原件替换,无果。重新做了一块板,问题解决!

限于mcu的flash只有8k,导致程序写不下了,所以功能做了调整。
最终(暂定)功能:
A端:独立显示时间,读取18b20温度通过电力线发给B
B端:独立显示时间,通过电力线读取数据并显示温度,可以更改时间,可以校准A的时间。
尚有未完善的问题:如何用定时器精确微秒级延时供18b20使用
网上参考了很多方案,自己也调试了许多,效果都不理想。
最终使用原子的汇编延时,较准确。
这个问题留待后期解决。
由于没有铜柱,我简单打印了一个外壳(图里没有体现)。2333
MI200e电力线通讯的更多相关文章
- oneM2M标准发展神速 实现万物联网的愿景
http://m2m.iot-online.com/news/2013102224849.html oneM2M则将负责解决独立于接取网路中通用的M2M服务层的关键需求:使其可更方便地嵌入于各种软硬体 ...
- HTML5笔记:跨域通讯、多线程、本地存储和多图片上传技术
最近做项目在前端我使用了很多新技术,这些技术有bootstrap.angularjs,不过最让我兴奋的还是使用了HTML5的技术,今天我想总结一些HTML5的技术,好记性不如烂笔头,写写文章可以很好的 ...
- (转)利用libcurl和国内著名的两个物联网云端通讯的例程, ubuntu和openwrt下调试成功(四)
1. libcurl 的参考文档如下 CURLOPT_HEADERFUNCTION Pass a pointer to a function that matches the following pr ...
- (转)linux下和云端通讯的例程, ubuntu和openwrt下实验成功(二)
前言: 上节用纯linux的函数实现了和云端通讯, 本节开始利用传说中的神器libcurl 话说一个网络程序员对书法十分感兴趣,退休后决定在这方面有所建树. 于是花重金购买了上等的文房四宝. 一 ...
- (转)linux下和云端通讯的例程, ubuntu和openwrt实验成功(一)
一. HTTP请求的数据流总结#上传数据, yeelink的数据流如下POST /v1.0/device/4420/sensor/9089/datapoints HTTP/1.1Host: api. ...
- 用SignalR 2.0开发客服系统[系列1:实现群发通讯]
前言 交流群:195866844 先说一下我为什么会写这个博客吧,(首先说一下,我是一个小菜鸟,讲的不好请指导 - -,) 前段时间公司的项目涉及到在B/S上使用即时通讯,(其实就是做一个B/S的客 ...
- 用SignalR 2.0开发客服系统[系列3:实现点对点通讯]
前言 交流群:195866844 目录: 用SignalR 2.0开发客服系统[系列1:实现群发通讯] 用SignalR 2.0开发客服系统[系列2:实现聊天室] 真的很感谢大家的支持,今天发表系列3 ...
- 基于 WebSocket 实现 WebGL 3D 拓扑图实时数据通讯同步(二)
我们上一篇<基于 WebSocket 实现 WebGL 3D 拓扑图实时数据通讯同步(一)>主要讲解了如何搭建一个实时数据通讯服务器,客户端与服务端是如何通讯的,相信通过上一篇的讲解,再配 ...
- 基于 WebSocket 实现 WebGL 3D 拓扑图实时数据通讯同步(一)
今天没有延续上一篇讲的内容,穿插一段小插曲,WebSocket 实时数据通讯同步的问题,今天我们并不是很纯粹地讲 WebSocket 相关知识,我们通过 WebGL 3D 拓扑图来呈现一个有趣的 De ...
随机推荐
- poj1321_kuagnbin带你飞专题一
棋盘问题 Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 43565 Accepted: 21163 Descriptio ...
- 七牛免费SSL证书申请全流程
购买证书 在七牛ssl 首页点击购买 购买限免证书 补全订单信息 免费证书,随意填写,问题不大 购买成功,查看订单详情,获取 TXT 值信息 添加 DNS TXT 验证 根据上一步,查看证书订单详情, ...
- python argparse sys.argv
python argparse sys.argv class WeiLearningArgumentParser(argparse.ArgumentParser): def __init__(self ...
- Java编程基础篇第二章
关键字 概述:被Java语言赋予特定含义的单词. 特点:组成关键字的字母全部为小写字母. 标识符 概述:给类,接口,包,方法,常量起名字时的字符序列 组成规则:英文大小写字母,数字,$和— 命名规则. ...
- C#实现全窗体范围拖动
using System.Runtime.InteropServices; [DllImport("user32.dll")] public static extern bool ...
- python语法_使用占位符进行格式化输出
“%s” 占位符 name = input("name:") age = input("age:") job = input("job:" ...
- day15 十五、模块、from导入、起别名
一.模块的概念 1.什么是模块:一系列功能的集合体 2.定义模块:创建一个py文件就是一个模块,该py文件名就是模块名 模块的四种存在方式 使用python编写的.py文件 包:一堆py文件的集合体 ...
- Feign 重试解析
Spring cloud Feign 在restful 调用失败后,会进行重试.在没有到达指定重试次数,会一直重试. @Override public Object invoke(Object[] a ...
- Python 学习笔记1 安装和IDE
前面的话 现在随着互联网的快速发展,对测试人员的代码要求也越来越高.有种逐步往全栈开发人员发展的趋势. 越来越多的手工测试被自动化取代. 对于测试人员,学习一门开发语言迫在眉睫. C#, JAVA, ...
- MVCC&PURGE&分布式事务
Ⅰ.MVCC介绍 consistent non-locking read,通过行多版本控制的方式读取当前执行时间点的记录 默认情况下innodb select没有任何锁,读到的记录在更新就通过undo ...