【jetson nano】烧录系统
烧录固件
烧录固件是为了让板子用tf卡作为系统启动(非板载启动),一般来说只需要刷写一遍。
- 安装vm,找到虚拟机镜像,解压part01就能获取镜像。 打开vm,打开此虚拟机镜像,账号clb,密码为123456

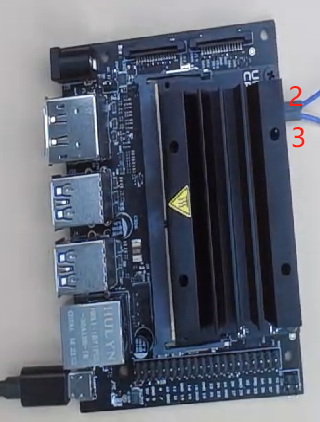
- 短接23脚进入烧录模式,使用Micro-USB连接线连接Nano和电脑,然后DC电源上电。可以看到电源指示灯亮,虚拟机弹窗提示检测到新的USB设备,选择连接到虚拟机。

- 打开终端输入命令
sudo ./flash.sh -r jetson-nano-devkit-emmc mmcblk0p1
- 等待一段时间,固件刷写成功如下所示
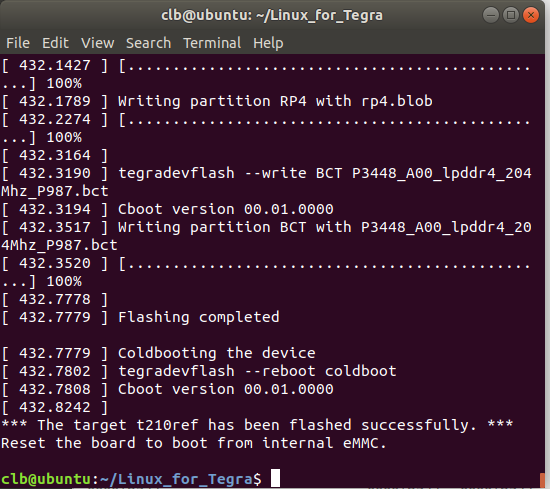
- 关闭电源,然后拔掉短接线,接上显示器,然后重新上电。此时没有插TF卡,系统仍然能开机,但是会停留在命令行模式,并提示以下内容说明烧写成功。
[1.167700] tegradc tegradc.1: dpd enable lookup fail:-19
[1.324122] imx219 7-0010: imx219 board setup: error during i2c read probe (-121)
[1.324189] imx219 7-0010: board setup failed
[1.348016] imx219 8-0010: imx219 board setup: error during i2c read probe (-121)
[1.348078] imx219 8-0010: board setup failed
bash: cannot set terminal process group (-1): Inappropriate ioctl for device
bash: no job control in this shell
bash-4.4#
烧录系统
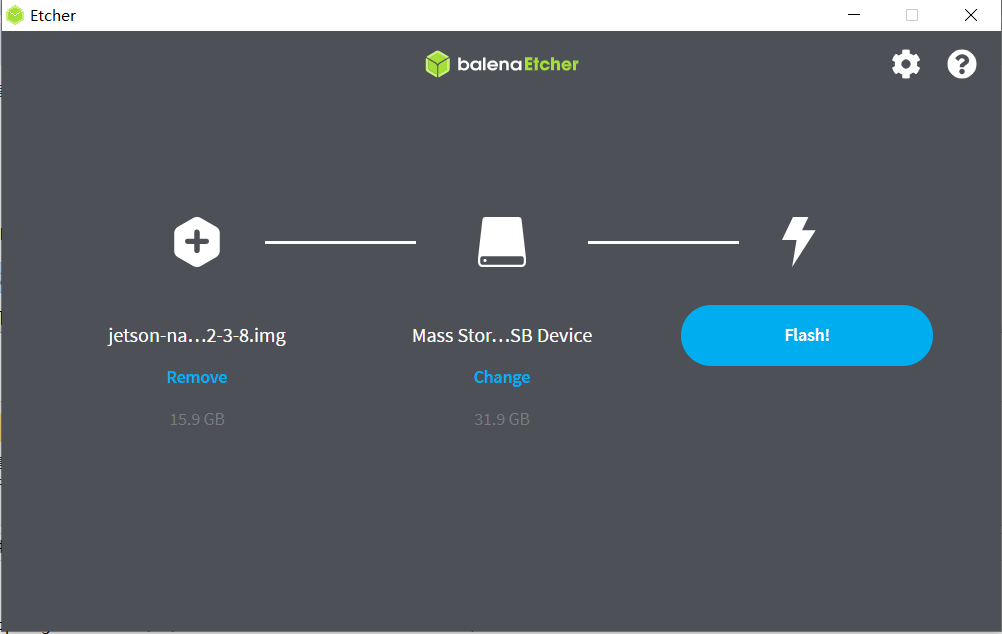
- 读卡器把TF卡接入电脑,电脑安装烧录工具balenaEtcher

- 将店铺提供的jetson Nano镜像文件解压到某个文件夹下,会得到6.17GB的镜像压缩包

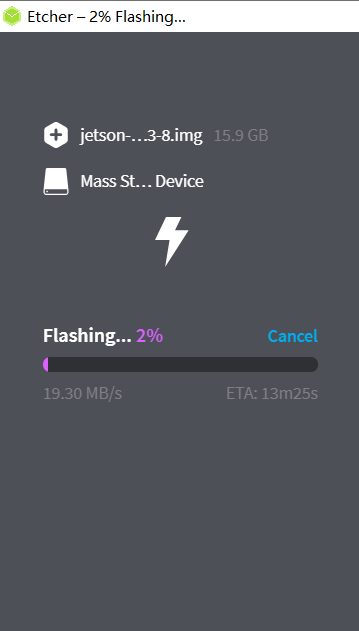
- zip的镜像压缩包可以解压得到15GB左右的img文件,也可以不解压,直接点击flash from file进行加载。select target选中插入的TF卡,然后点击Flash,烧录加上验证大概需要25分钟。
换源
- 备份系统源文件
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
- 获取镜像源
- 编辑sources.list文件
sudo gedit /etc/apt/sources.list
- 替换原有镜像源
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse # 以下安全更新软件源包含了官方源与镜像站配置,如有需要可自行修改注释切换
deb http://ports.ubuntu.com/ubuntu-ports/ bionic-security main restricted universe multiverse
# deb-src http://ports.ubuntu.com/ubuntu-ports/ bionic-security main restricted universe multiverse # 预发布软件源,不建议启用
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse
- 更新软件源
sudo apt update
分区扩容
- 将TF卡插入到Nano中,然后上电,可以正常进入系统。店铺提供的系统默认分区大小是15GB,而TF卡是32G,有很多的Free space没有被使用。
nvidia@nvidia-desktop:~$ df -lh
Filesystem Size Used Avail Use% Mounted on
/dev/sda1 15G 13G 1.6G 89% /
none 1.7G 0 1.7G 0% /dev
tmpfs 2.0G 151M 1.8G 8% /dev/shm
tmpfs 2.0G 36M 1.9G 2% /run
tmpfs 5.0M 4.0K 5.0M 1% /run/lock
tmpfs 2.0G 0 2.0G 0% /sys/fs/cgroup
tmpfs 396M 152K 396M 1% /run/user/1000
/dev/mmcblk0p1 14G 4.7G 8.4G 36% /media/nvidia/8c9249d6-0ce4-40a6-bd5a-0fad354db986
- 下面我们可以利用gparted来扩容,充分利用SD卡空间。
sudo apt-get install gparted
- 安装成功之后,启动
sudo gparted
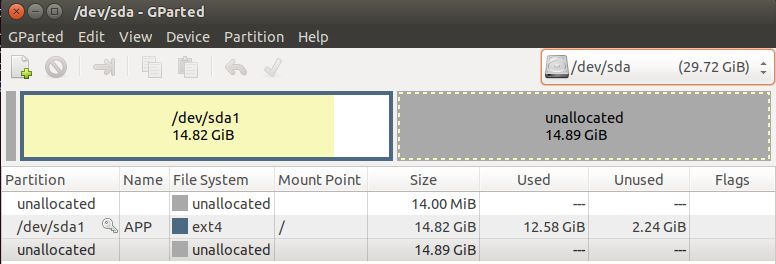
- 在右上角切换到磁盘/dev/sda,可以看到有一半的空间处于未分配状态。
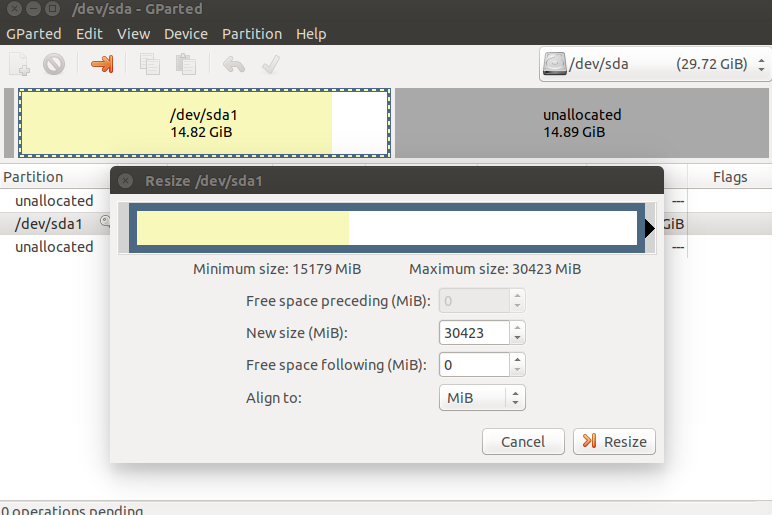
- 右键已分配空间的分区,选择Resize,拖动上面的游标将空间大小设置到最大。
- 然后点击上面的绿色对钩,确认更改。
风扇自启动
设置风扇开机时自启动,前提是风扇已经安装。编辑自启动脚本
sudo gedit /etc/rc.local
写入命令,控制风扇运转到最高功率的100/255
sudo sh -c 'echo 100 > /sys/devices/pwm-fan/target_pwm'
然后需要赋予脚本执行权限
sudo chmod 755 /etc/rc.local
安装中文输入法
安装vscode
安装VS Code的依赖项
sudo apt install -y curl libnotify4 libnss3 libxkbfile1 libgtk-3-0
下载VS Code的.deb文件
curl -L https://update.code.visualstudio.com/1.53.2/linux-deb-arm64/stable -o vscode.deb
安装VS Code的.deb文件
sudo apt-get install ./vscode.deb
参考:
【jetson nano】烧录系统的更多相关文章
- Jetson Nano 系列教程2:串口调试接口登录Jetson Nano
连接Jetson Nano可以有多种方法,这里我们一一介绍一下.开始本章节前,请先参考上一章,烧写好镜像 直接连接 所谓直接连接,就是将Jetson Nano当做主机,连接HDMI屏幕,连接键盘和鼠标 ...
- Jetson Nano系列教程1:烧写系统镜像
下载镜像 NVIDIA官方为Jetson Nano Developer Kit (后面统称为Jetson Nano了)提供了SD卡版本的系统镜像,并且根据JetPack版本不断得在更新.所以你可以直接 ...
- jetson nano开发使用的基础详细分享
前言: 最近拿到一块jetson nano 2GB版本的板子,折腾了一下,从烧录镜像.修改配件等,准备一篇开箱基础文章给大家介绍一下这块AI开发板. 作者:良知犹存 转载授权以及围观:欢迎关注微信公众 ...
- Jetson Nano系列教程3:GPIO
摘要: JetsonTX1,TX2,AGXXavier和Nano开发板包含一个40引脚的GPIO头,类似于Raspberry PI中的40引脚头.这些GPO可以通过JetsonGPIOLibrary包 ...
- Jetson Nano系列教程0:初识Jetson Nano
关于Jetson Nano Developer Kit Jetson nano搭载四核Cortex-A57 MPCore 处理器,采用128 核 Maxwell™ GPU.支持JetPack SDK ...
- [Jetson Nano]Jetson Nano快速入门
NVIDIAJetsonNano开发套件是适用于制造商,学习者和开发人员的小型AI计算机.相比Jetson其他系列的开发板,官方报价只要99美金,可谓是相当有性价比.本文如何是一个快速入门的教程,主要 ...
- 1、Jetson Nano 远程桌面XP问题
jeston nano上网 方法3(最简单的方法) 最简单的方法真的特简单,用USB数据线连接主板的USB接口以及手机,打开手机的USB共享即可,若要使用静态IP,可在主板上修改配置文件,接口一般为u ...
- Jetson Nano更改软件源
Jetson Nano 采用的是 aarch64 架构的Ubuntu 18.04.2 LTS 系统 sudo vim /etc/apt/sources.list deb http://mirrors. ...
- jetson nano 4gb记录
常用命令 Ctrl alt t 打开终端gnome-session-properties 打开开机自启动管理界面 ifconfig 查看ip xrandr --fb 1200x800 调节分辨率 ll ...
- Jetson Nano Developer Kit
The Jetson Nano Developer Kit is an AI computer for learning and for making. 一个推理框架,用于部署模型到嵌入式设备. ...
随机推荐
- HashMap面试必问的数据结构相关知识总结
1:HashMap 的数据结构? A:哈希表结构(链表散列:数组+链表)实现,结合数组和链表的优点.当链表长度超过 8 时,链表转换为红黑树.transient Node<K,V>[] t ...
- ECharts海量数据渲染解决卡顿的4种方式
场景 周五进行需求评审的时候: 出现了一个图表,本身一个图表本没有什么稀奇的: 可是产品经理在图表的上的备注,让我觉得这个事情并不简单: 那个图表的时间跨度可以是月,年,而且时间间隔很短: 这让我意识 ...
- Istio 从懵圈到熟练:二分之一活的微服务
作者 | 声东 阿里云售后技术专家 <关注阿里巴巴云原生公众号,回复 排查 即可下载电子书> <深入浅出 Kubernetes>一书共汇集 12 篇技术文章,帮助你一次搞懂 ...
- 云企业网CEN-TR打造企业级私有网络
简介: 为了满足企业大规模.多样化的组网和网络管理需求,云企业网(CEN)提出了转发路由器TR(Transit Router)的概念.在每个地域内创建一个转发路由器,可以连接大量VPC.VBR,作为您 ...
- 无缝融入 Kubernetes 生态 | 云原生网关支持 Ingress 资源
简介:Kubernetes 一贯的作风是通过定义标准来解决同一类问题,在解决集群对外流量管理的问题也不例外.Kubernetes 对集群入口点进行了进一步的统一抽象,提出了 3 种解决方案:Node ...
- e签宝:借助钉钉宜搭变革传统项目管理模式,交付效率显著提升
简介:通过钉钉宜搭,e签宝在半个月内搭建了项目交付管理平台,提升了项目管理的效率和质量,推进了团队核心业务的信息化建设.e签宝在有效梳理了各环节的工作进度.质量.成本.职权后,通过宜搭平台保障了内外 ...
- StarLake:汇量科技云原生数据湖的探索和实践
简介: 快速了解汇量科技在云原生数据湖领域的探索和实践,详解 StarLake 的架构及业务应用案例. 作者:陈绪(汇量科技资深算法架构师,EnginePlus 2.0 产品负责人) 内容框架: 互联 ...
- frp内网穿透器安装与介绍
1.NAT访问 2.FRP介绍 中文官方文档:https://gofrp.org/docs/ github:https://github.com/fatedier/frp/releases frp 采 ...
- STM32 USART串口通信
一.介绍 通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换.USART利用分数波特率发生器提供宽范围的波特率选择.它支持同步单向 ...
- SpringMVC学习五(resultful风格/异常处理/注解)
resultful风格 异常处理 1.Restfule风格 Restfule风格是一种软件架构风格,而不是标准,只是提供了一种设计原则和约束条件.主要适用于客户端和服务器端交互的软件.是基于http协 ...