感知器、logistic与svm 区别与联系
https://blog.csdn.net/m0_37786651/article/details/61614865
从感知器谈起
对于典型的二分类问题,线性分类器的目的就是找一个超平面把正负两类分开。对于这个超平面,我们可以用下面的式子来表示,
感知器是最简单的一种线性分类器。用f(x)表示分类函数,感知器可以如下来表示。
感知器相当于一个阶跃函数,如下图所示,在0处有一个突变。
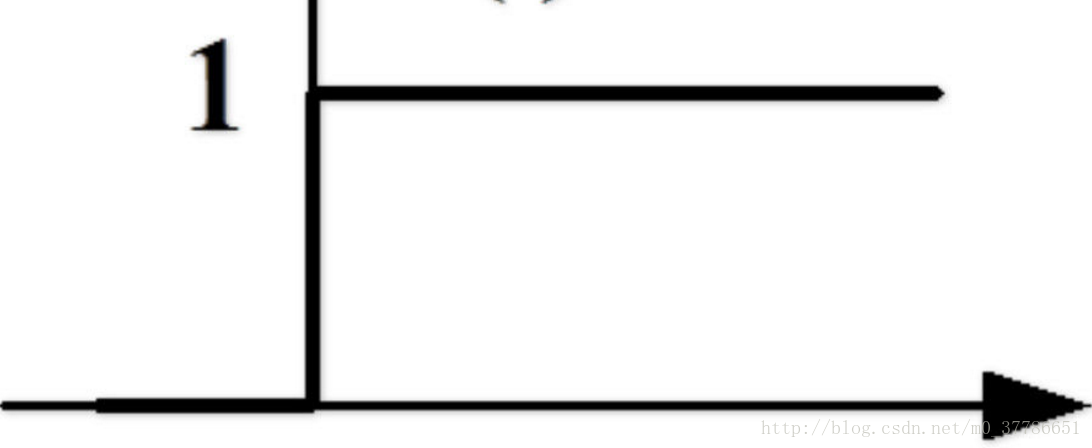
损失函数是分类器优化的目标函数,可以用来衡量分类错误的程度,损失函数值越小,代表分类器性能越好。感知器的损失函数为误分类点的函数间隔之和,函数间隔可以理解为样本与分类超平面的距离。误分类点距离分类超平面越远,则损失函数值越大。只有误分类的点会影响损失函数的值。
从感知器到logistic回归
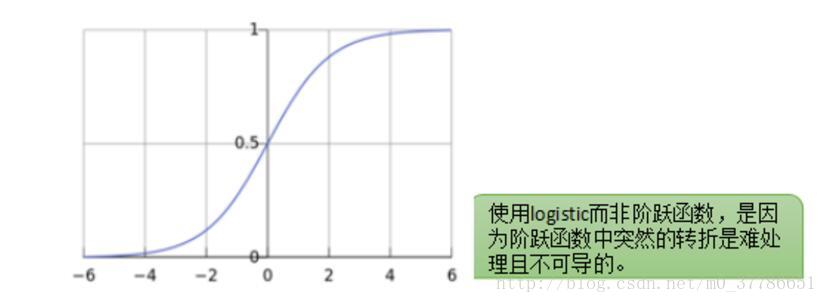
感知器模型简单直观,但问题在于这个模型不够光滑,比如如果对于一个新的样本点我们计算出ω^T x+b=0.001,只比0大了一点点就会被分为正样本。同时这个点在0处有一个阶跃,导致这一点不连续,在数学上处理起来不方便。
那有没有办法让 ωTx+bωTx+b 到y的映射变得更加光滑呢,人们发现logistic函数有着这样的特性,输入范围是−∞→+∞,而值域光滑地分布于0和1之间。于是就有了logistic回归,正样本点分类的超平面距离越远,ωTx+bωTx+b 越大,而logistic函数值则越接近于1。负样本点分类的超平面距离越远,ωTx+bωTx+b 越小,而logistic函数值则越接近于0。
Logistic回归的损失函数为logistic损失函数,当分类错误时,函数间隔越大,则损失函数值越大。当分类正确时,样本点距离超平面越远,则损失函数值越小。所有的样本点分布情况都会影响损失函数最后的值。
从感知器到SVM
在感知器分类选分类超平面时,我们可以选择很多个平面作为超平面,而选择哪个超平面最好呢,我们可以选择距离正样本和负样本最远的超平面作为分类超平面,基于这种想法人们提出了SVM算法。SVM的损失函数为合页函数,当分类错误时,函数间隔越大,则损失函数值越大。当分类正确且样本点距离超平面一定距离以上,则损失函数值为0。误分类的点和与分类超平面距离较近的点会影响损失函数的值。
感知器、logistic与SVM
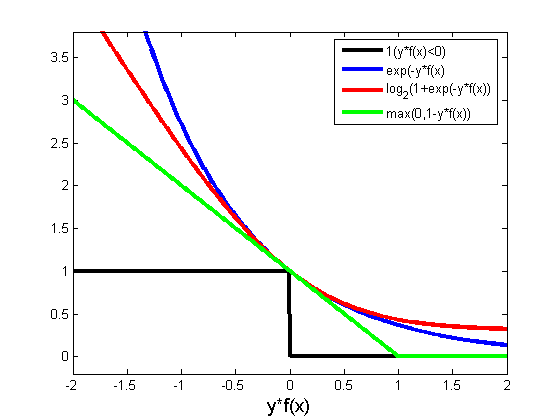
三者都是线性分类器,而logistic和svm是由感知器发展改善而来的。区别在于三者的损失函数不同,后两者的损失函数的目的都是增加对分类影响较大的数据点的权重,SVM的处理方法是只考虑support vectors,也就是和分类最相关的少数点,去学习分类器。而逻辑回归通过非线性映射,大大减小了离分类平面较远的点的权重,相对提升了与分类最相关的数据点的权重。下图中红色的曲线代表logistic回归的损失函数,绿色的线代表svm的损失函数。
参考
[1] 统计学习方法,李航
[2] http://blog.csdn.net/hel_wor/article/details/50539967
[3] https://www.zhihu.com/question/21704547
感知器、logistic与svm 区别与联系的更多相关文章
- 机器学习之感知器和线性回归、逻辑回归以及SVM的相互对比
线性回归是回归模型 感知器.逻辑回归以及SVM是分类模型 线性回归:f(x)=wx+b 感知器:f(x)=sign(wx+b)其中sign是个符号函数,若wx+b>=0取+1,若wx+b< ...
- 感知器、逻辑回归和SVM的求解
这篇文章将介绍感知器.逻辑回归的求解和SVM的部分求解,包含部分的证明.本文章涉及的一些基础知识,已经在<梯度下降.牛顿法和拉格朗日对偶性>中指出,而这里要解决的问题,来自<从感知器 ...
- 从感知器到SVM
这篇文章主要是分析感知器和SVM处理分类问题的原理,不涉及求解 感知器: 感知器要解决的是这样的一个二分类问题:给定了一个线性可分的数据集,我们需要找到一个超平面,将该数据集分开.这个超平面的描述如下 ...
- 第三集 欠拟合与过拟合的概念、局部加权回归、logistic回归、感知器算法
课程大纲 欠拟合的概念(非正式):数据中某些非常明显的模式没有成功的被拟合出来.如图所示,更适合这组数据的应该是而不是一条直线. 过拟合的概念(非正式):算法拟合出的结果仅仅反映了所给的特定数据的特质 ...
- 【2008nmj】Logistic回归二元分类感知器算法.docx
给你一堆样本数据(xi,yi),并标上标签[0,1],让你建立模型(分类感知器二元),对于新给的测试数据进行分类. 要将两种数据分开,这是一个分类问题,建立数学模型,(x,y,z),z指示[0,1], ...
- 机器学习 —— 基础整理(六)线性判别函数:感知器、松弛算法、Ho-Kashyap算法
这篇总结继续复习分类问题.本文简单整理了以下内容: (一)线性判别函数与广义线性判别函数 (二)感知器 (三)松弛算法 (四)Ho-Kashyap算法 闲话:本篇是本系列[机器学习基础整理]在time ...
- tensorflow学习笔记——自编码器及多层感知器
1,自编码器简介 传统机器学习任务很大程度上依赖于好的特征工程,比如对数值型,日期时间型,种类型等特征的提取.特征工程往往是非常耗时耗力的,在图像,语音和视频中提取到有效的特征就更难了,工程师必须在这 ...
- 深度学习炼丹术 —— Taoye不讲码德,又水文了,居然写感知器这么简单的内容
手撕机器学习系列文章就暂时更新到此吧,目前已经完成了支持向量机SVM.决策树.KNN.贝叶斯.线性回归.Logistic回归,其他算法还请允许Taoye在这里先赊个账,后期有机会有时间再给大家补上. ...
- Stanford大学机器学习公开课(三):局部加权回归、最小二乘的概率解释、逻辑回归、感知器算法
(一)局部加权回归 通常情况下的线性拟合不能很好地预测所有的值,因为它容易导致欠拟合(under fitting).如下图的左图.而多项式拟合能拟合所有数据,但是在预测新样本的时候又会变得很糟糕,因为 ...
随机推荐
- 09:Linux 中各个文件夹的作用
参考博客 / 根目录 包含了几乎所的文件目录.相当于中央系统.进入的最简单方法是:cd /. /boot 引导程序,内核等存放的目录 这个目录,包括了在引导过程中所必需的文件.在最开始的启动阶段, ...
- 03: Django Model数据库操作
目录:Django其他篇 01:Django基础篇 02:Django进阶篇 03:Django数据库操作--->Model 04: Form 验证用户数据 & 生成html 05:Mo ...
- C#工程详解
转:https://www.cnblogs.com/zhaoqingqing/p/5468072.html 前言 写这篇文章的目地是为了让更多的小伙伴对VS生成的工程有一个清晰的认识.在开发过程中,为 ...
- DDMS files not found
在eclipse中启动新建的android项目的时候,控制台提示如图: 方法1.cmd中adb kill-server,然后adb -startserver 方法2.方法1不管用,那么在任务管理器中杀 ...
- 【基础配置】Dubbo的配置及使用
1. Dubbo是什么? Dubbo是一个分布式服务框架,致力于提供高性能和透明化的RPC远程服务调用方案,以及SOA服务治理方案.简单的说,dubbo就是个服务框架,如果没有分布式的需求,其实是不需 ...
- [luogu 1070]道路游戏(NOIP2009T4)
题目链接 题解: 题目描述好长啊.... 大概就是设一下$f[i]$表示第i秒的最大价值 首先枚举时间,然后因为机器人这一秒无论在哪里都是有可能的,所以要枚举一下每个点,又因为最多走p秒所以再枚举一下 ...
- 利用Ajax和Servlet实现输入框提示功能
目的和效果: 输入框输入字符串x,匹配后台传入的数据str,如果str中的元素包含字符串x,则提示. 后台代码: String x = request.ge ...
- C# 代码设置DataGrid列属性
1 DataGridTableStyle dts = new DataGridTableStyle(); 2 dataGrid1.TableStyles.Clear(); 3 dts.MappingN ...
- 关于express项目的创建与启动
没有经常用,所以经常搞错, 创建express项目,需要新建一个文件夹名,这个文件名就是用来承载express的内容的, 好了.打开终端,cd至创建的文件夹之下. 也可以直接这样,如以下,admin为 ...
- WPF基础学习笔记整理 (六) RoutedEvent路由事件
基础知识: 传统的事件模型中,会在消息触发时将消息通过事件传给事件的订阅者(显式的事件订阅),事件订阅者使用事件处理程序来做出响应.事件订阅者必须能够直接访问到事件的宿主(拥有者). 路由事件的事件的 ...