CORDIC算法(1):圆周旋转模式下计算三角函数和模值
CORDIC(Coordinate Rotation Digital Computer)坐标旋转数字计算机,是数学与计算机技术交叉产生的一种机器算法,用于解决计算机的数学计算问题。发展到现在,CORDIC算法及其扩展算法大致有三种计算模式:圆周旋转模式、线性旋转模式和双曲线旋转模式,分别用来实现不同的数学运算。
本文介绍圆周旋转模式下的CORDIC算法原理及实现过程,另两种模式将分期介绍。
简单来讲,CORDIC利用近似逼近的思想,将计算机中三角函数、开根号、求对数等复杂运算,转化为简单的加减和移位操作。
对于实际只会识别0和1的计算机来说,加减和移位是它能轻松实现的操作,因此利用CORDIC算法将大大提升计算机对复杂运算的计算效率。目前,尽管计算机的运行速度已经足够使得大多数开发者不用太多考虑计算效率的问题,但在一些实时数据流比较大的场合(如通信、多媒体处理等),CORDIC算法依然是实现高速运算的关键。
类似CORDIC实现的数学思想早在1624年就由Henry Briggs提出并发表,但直到1956年,CORDIC算法才真正被美国工程师Jack E.Volder发现并运用,当时他正在寻找提高计算器计算精度和实时性的算法。直到1959年,Volder的算法才为公众所知,并在计算器上大行其道。
算法描述
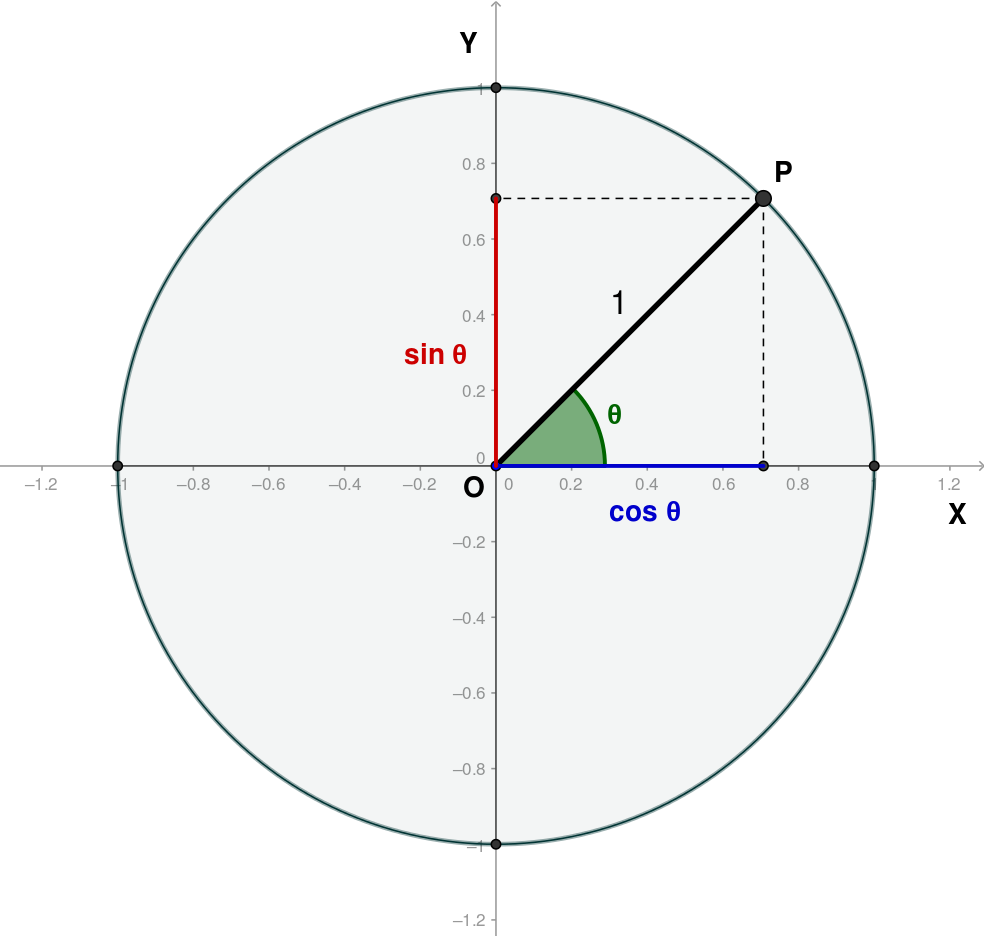
1. 数学背景
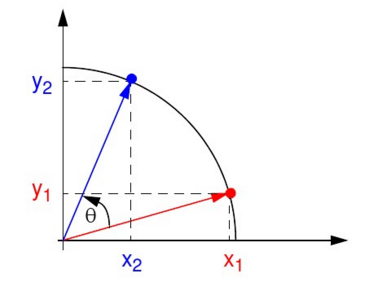
如图,XY平面中一点(x1,y1)经圆周旋转θ角度,得到点(x2,y2)。经简单的三角函数关系,可得到:

通过提出因数cosθ,可得:

如果不考虑cosθ,得到“伪旋转”方程:
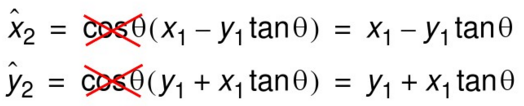
伪旋转仅实现了正确的角度旋转,但向量模值变为原来的1/cosθ。
2. CORDIC方法
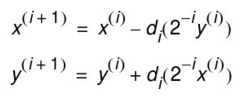
若使得tanθ = 2^(-i),i为自然数,则上式变为:

注意!上式已经仅剩加减和移位运算。
如果我们把所有tanθi = 2^(-i)对应的角度和正切值制成一张表,如下所示:

……
可以确定的是,任意旋转角度θ,都可以由上表中的大小不同θi进行多次旋转得到。CORDIC正是利用这一点,将θ角度的旋转分解为从大到小、逐次逼近真实旋转角度的一组旋转,而这些旋转的实现又都可以由加减和移位运算来完成。θi可以预先制成表格,供计算机查找使用。
算法实现
1. 已知坐标(x,y),求其向量对应的相角θ(反正切)和模值
思想: 把原向量逐次向X正轴进行伪旋转逼近,整个过程的累计旋转角度即为θ,而旋转后的x坐标补偿模值增益K后即为原向量模值。
每次迭代的方程为:
模值总增益K为:
其中d决定旋转方向为逆时针还是顺时针,z为角度累加值。
注意!查找表中所有θi的总和约为99度,因此能实现计算的角度在-99~99度之间。实际算法实现时,我们可预先判断坐标象限,人为将其转化为第一象限内的计算,并在事后补偿为真实值。
如图:(x,y)=(3,sqrt(3)),迭代深度=16,CORDIC算法实现过程
matlab代码如下:
%% ***********************************************************************************
% 已知坐标,用cordic算法计算相角和幅值。基本公式如下:
% x(k+) = x(k) - d(k)*y(k)*^(-k)
% y(k+) = y(k) + d(k)*x(k)*^(-k)
% z(k) = z(k) - d(k)*actan(^(-k))
%% *********************************************************************************** clear;close all;clc;
% 初始化----------------------------------------
N = ; %迭代次数
tan_table = .^-( : N-);
angle_LUT = atan(tan_table); K = ;
for k = : N-
K = K*(/sqrt( + ^(-*k)));
end x = ;
y = sqrt();
angle_accumulate = ; % cordic算法计算-------------------------------
if (x== && y==)
radian_out = ;
amplitude_out = ;
else % 先做象限判断,得到相位补偿值
if (x > )
phase_shift = ;
elseif (y < )
phase_shift = -pi;
else
phase_shift = pi;
end for k = : N- % 迭代开始
x_temp = x;
if (y < ) % d(k)=,逆时针旋转
x = x_temp - y*^(-k);
y = y + x_temp*^(-k);
angle_accumulate = angle_accumulate - angle_LUT(k+);
else % d(k)=-,顺时针旋转
x = x_temp + y*^(-k);
y = y - x_temp*^(-k);
angle_accumulate = angle_accumulate + angle_LUT(k+);
end
radian_out = angle_accumulate + phase_shift; %弧度输出
end amplitude_out = x*K; %幅值输出
end angle_out = radian_out*/pi; %相角输出
2. 已知角度θ,求正弦sinθ和余弦cosθ
思想: 若向量模值为1,则其x坐标就是余弦值,y坐标就是正弦值。利用这一点,从(K,0)处迭代旋转至θ处的单位矢量即可。
迭代方程及K的计算同第一小节。同时也要注意预先对象限的判断和补偿。
如图:θ=60度,迭代深度=16,CORDIC算法实现过程
matlab代码如下:
%% ***********************************************************************************
% 已知相角theta,计算其正弦和余弦值。基本公式如下:
% x(k+) = x(k) - d(k)*y(k)*^(-k)
% y(k+) = y(k) + d(k)*x(k)*^(-k)
% z(k) = z(k) - d(k)*actan(^(-k))
%% ***********************************************************************************
clear;close all;clc; % 初始化----------------------------------------
N = ; %迭代次数
tan_table = .^-( : N-);
angle_LUT = atan(tan_table); K = ;
for k = : N-
K = K*(/sqrt( + ^(-*k)));
end theta = -;
x = ;
y = ;
phase_accumulate = theta/*pi; %转化为弧度 % cordic算法计算-------------------------------
if (phase_accumulate > pi/) % 先做象限判断,得到相位补偿值
phase_accumulate = phase_accumulate - pi;
sign_x = -;
sign_y = -;
elseif (phase_accumulate < -pi/)
phase_accumulate = phase_accumulate + pi;
sign_x = -;
sign_y = -;
else
sign_x = ;
sign_y = ;
end for k = : N- % 迭代开始
x_temp = x;
if (phase_accumulate > ) % d(k)=,逆时针旋转
x = x_temp - y*^(-k);
y = y + x_temp*^(-k);
phase_accumulate = phase_accumulate - angle_LUT(k+);
else % d(k)=-,顺时针旋转
x = x_temp + y*^(-k);
y = y - x_temp*^(-k);
phase_accumulate = phase_accumulate + angle_LUT(k+);
end
end cos_out = sign_x*x*K; %余弦输出
sin_out = sign_y*y*K; %正弦输出
参考文献/资料
【1】https://en.wikipedia.org/wiki/CORDIC
【2】Xilinx CORDIC算法(非常经典)——百度文库
【3】ANDRAKA R. A Survey of CORDIC Algorithms for FPGA Based Computers[C] ,1998
·END·
欢迎来我的微信公众号做客:信号君
专注于信号处理知识、高性能计算、现代处理器&计算机体系
技术成长 | 读书笔记 | 认知升级

幸会~
![]()
CORDIC算法(1):圆周旋转模式下计算三角函数和模值的更多相关文章
- FPGA之CORDIC算法实现_代码实现(下)
关于FPGA之CORDIC算法的纯逻辑实现,博主洋葱洋葱“https://www.cnblogs.com/cofin/p/9188629.html”以及善良的一休军“https://blog.csdn ...
- win10下计算文件哈希值的方法
cmd下使用certutil命令 使用方法: certutil -hashfile FILE_NAME ALGORITHM_NAME 支持的加密算法包括:MD2,MD4,MD5,SHA1,SHA256 ...
- Cordic算法——圆周系统之旋转模式
三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常是通过从已知值(比如sin(π/2)= ...
- FPGA算法学习(1) -- Cordic(圆周系统之旋转模式)
三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常是通过从已知值(比如sin(π/2)= ...
- Cordic算法——圆周系统之向量模式
旋转模式用来解决三角函数,实现极坐标到直角坐标的转换,基础理论请参考Cordic算法--圆周系统之旋转模式.那么,向量模式则用来解决反三角函数的问题,体现的应用主要是直角坐标向极坐标转换,即已知一点的 ...
- 基于FPGA的Cordic算法实现
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数.双曲线.指数.对数的 ...
- cordic算法的verilog实现及modelsim仿真
1. 算法介绍 CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数.双曲 ...
- 使用CORDIC算法求解角度正余弦及Verilog实现
本文是用于记录在了解和学习CORDIC算法期间的收获,以供日后自己及他人参考:并且附上了使用Verilog实现CORDIC算法求解角度的正弦和余弦的代码.简单的testbench测试代码.以及在Mod ...
- 软件调试——IA-32 保护模式下寄存器一览
最近在看张银奎先生的<调试软件>一书,想将关键的技术记录下来,以便日后查阅,也分享给想看之人吧. 1 通用寄存器 EAX,EBX,ECX,EDX:用于运算的通用寄存器,可以使用AX,BX等 ...
随机推荐
- php安装扩展redis淌过的坑
php安装扩展redis淌过的坑 php扩展 redis cd /usr/local/src/ wget https://github.com/nicolasff/phpredis/archive/2 ...
- sql server alter column 由于一个或多个对象访问此列,ALTER TABLE ALTER COLUMN 失败
今天在修改一个字段类型,由原来的 varchar(500) 增加到 varchar(1000) 则对应的SQL 语句,执行后如图错误 结果查下来是因为其中一个视图建成了索引视图, 解决办法:先将该视图 ...
- ListView实现下拉刷新(二)隐藏头布局
一.问题分析 在上一篇中,我们将头布局加到了ListView上.但是没有隐藏他.你可能会想,隐藏还不简单,直接给它设置为GONE属性不就可以了吗,在需要的时候再设定为可见.没错,这正是ListView ...
- thrift C++ Centos 安装
1.在官方下载thrift http://thrift.apache.org/download 这里下载thrift-0.11.0.tar.gz版本 2.如果想支持安装Cpp版本就需要先安装boost ...
- Mac安装composer爬过的坑
1.首先安装brew/usr/bin/ruby -e "$(curl -fsSLhttps://raw.githubusercontent.com/Homebrew/install/mast ...
- 7.spring:SpringAOP(配置文件)
SpringAOP(xml文件配置) 配置文件的方式,主要是在xml文件中进行配置,不使用注解! 目录: AtithmeticCalculator.java public interface Atit ...
- Kali-linux识别活跃的主机
尝试渗透测试之前,必须先识别在这个目标网络内活跃的主机.在一个目标网络内,最简单的方法将是执行ping命令.当然,它可能被一个主机拒绝,也可能被接收.本节将介绍使用Nmap工具识别活跃的主机. 网络映 ...
- 如何查看Windows下端口占用情况
开始---->运行---->cmd,或者是window+R组合键,调出命令窗口 输入命令:netstat -ano,列出所有端口的情况.在列表中我们观察被占用的端口,比如是49157,首 ...
- spring使用 hibernate jpa JpaRepository
使用JpaRepository需要两个架包: <dependency> <groupId>org.springframework.data</groupId> &l ...
- tensorflow节点布放(device assignment of node)算法:simpler_placer
tensorflow v0.9中目前在用的devcie assignment算法是simple placer算法,相比于白皮书中cost model算法实现简单.simpler placer算法优先选 ...