基于设备树的TQ2440触摸屏驱动移植
平台
概述
正文
一、移植触摸屏驱动

tq2440ts@ {
compatible = "tq2440,ts";
reg = <0x58000000 0x100>;
reg-names = "adc_ts_physical";
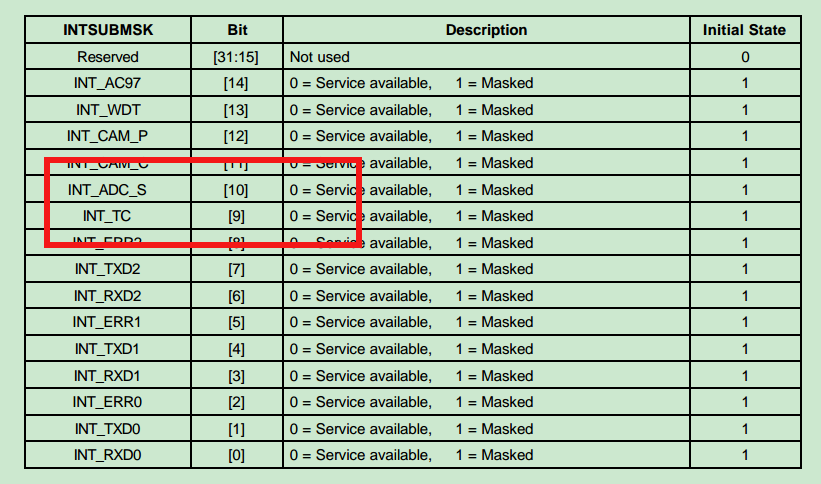
interrupts = < >, < >;
interrupt-names = "int_ts", "int_adc_s";
clocks = <&clocks PCLK_ADC>;
clock-names = "adc";
};
git clone git@github.com:pengdonglin137/linux-4.9.git -b tq2440_dt
/************************************* NAME:tq2440_ts.c
COPYRIGHT:www.embedsky.net *************************************/
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/init.h>
#include <linux/serio.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <linux/of_device.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <asm/io.h>
#include <asm/irq.h> #include <plat/regs-adc.h>
#include <mach/regs-gpio.h> /* For ts.dev.id.version */
#define S3C2410TSVERSION 0x0101 #define WAIT4INT(x) (((x)<<8) | \
S3C2410_ADCTSC_YM_SEN | S3C2410_ADCTSC_YP_SEN | S3C2410_ADCTSC_XP_SEN | \
S3C2410_ADCTSC_XY_PST()) #define AUTOPST (S3C2410_ADCTSC_YM_SEN | S3C2410_ADCTSC_YP_SEN | S3C2410_ADCTSC_XP_SEN | \
S3C2410_ADCTSC_AUTO_PST | S3C2410_ADCTSC_XY_PST()) static char *tq2440ts_name = "TQ2440 TouchScreen"; static struct input_dev *idev;
static long xp;
static long yp;
static int count; static void __iomem *base_addr; static void touch_timer_fire(unsigned long data)
{
u32 data0;
u32 data1;
int updown; data0 = readl(base_addr+S3C2410_ADCDAT0);
data1 = readl(base_addr+S3C2410_ADCDAT1); updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN)); if (updown) {
if (count != ) {
long tmp; tmp = xp;
xp = yp;
yp = tmp; xp >>= ;
yp >>= ; input_report_abs(idev, ABS_X, xp);
input_report_abs(idev, ABS_Y, yp); input_report_key(idev, BTN_TOUCH, );
input_report_abs(idev, ABS_PRESSURE, );
input_sync(idev);
} xp = ;
yp = ;
count = ; writel(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC);
writel(readl(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON);
} else {
count = ; input_report_key(idev, BTN_TOUCH, );
input_report_abs(idev, ABS_PRESSURE, );
input_sync(idev); writel(WAIT4INT(), base_addr+S3C2410_ADCTSC);
}
} static struct timer_list touch_timer =
TIMER_INITIALIZER(touch_timer_fire, , ); static irqreturn_t stylus_updown(int irq, void *dev_id)
{
u32 data0;
u32 data1;
int updown; data0 = readl(base_addr+S3C2410_ADCDAT0);
data1 = readl(base_addr+S3C2410_ADCDAT1); updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN)); if (updown)
touch_timer_fire(); return IRQ_HANDLED;
} static irqreturn_t stylus_action(int irq, void *dev_id)
{
u32 data0;
u32 data1; data0 = readl(base_addr+S3C2410_ADCDAT0);
data1 = readl(base_addr+S3C2410_ADCDAT1); xp += data0 & S3C2410_ADCDAT0_XPDATA_MASK;
yp += data1 & S3C2410_ADCDAT1_YPDATA_MASK;
count++; if (count < (<<)) {
writel(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC);
writel(readl(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON);
} else {
mod_timer(&touch_timer, jiffies+);
writel(WAIT4INT(), base_addr+S3C2410_ADCTSC);
} return IRQ_HANDLED;
} static int tq2440ts_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct device_node *node = dev->of_node;
struct clk *adc_clock;
struct resource *tsmem, *irq;
struct input_dev *input_dev;
int ret; if (!node) {
dev_dbg(dev, "of_node is NULL\n");
return -EINVAL;
} adc_clock = devm_clk_get(dev, "adc");
dev_dbg(dev, "adc_clock: %p\n", adc_clock);
if (IS_ERR(adc_clock)) {
dev_err(dev, "cannot get clock\n");
return -ENOENT;
}
clk_prepare(adc_clock);
clk_enable(adc_clock); dev_dbg(dev, "get mem\n");
tsmem = platform_get_resource_byname(pdev, IORESOURCE_MEM, "adc_ts_physical");
if (!tsmem) {
dev_dbg(dev, "get mem resource failed.\n");
ret = -EINVAL;
goto err;
} base_addr = devm_ioremap_resource(dev, tsmem);
if (IS_ERR(base_addr)) {
dev_dbg(dev, "ioremap failed.\n");
ret = PTR_ERR(base_addr);
goto err;
} writel(S3C2410_ADCCON_PRSCEN | S3C2410_ADCCON_PRSCVL(0xFF),base_addr+S3C2410_ADCCON);
writel(0xffff, base_addr+S3C2410_ADCDLY);
writel(WAIT4INT(), base_addr+S3C2410_ADCTSC); input_dev = devm_input_allocate_device(dev);
if (!input_dev) {
dev_dbg(dev, "ioremap failed.\n");
ret = -ENOMEM;
goto err;
} idev = input_dev;
idev->evbit[] = BIT(EV_SYN) | BIT(EV_KEY) | BIT(EV_ABS); __set_bit(EV_SYN, idev->evbit);
__set_bit(EV_KEY, idev->evbit);
__set_bit(EV_ABS, idev->evbit);
__set_bit(BTN_TOUCH, idev->keybit); input_set_abs_params(idev, ABS_X, , 0x3FF, , );
input_set_abs_params(idev, ABS_Y, , 0x3FF, , );
input_set_abs_params(idev, ABS_PRESSURE, , , , ); idev->name = tq2440ts_name;
idev->id.bustype = BUS_RS232;
idev->id.vendor = 0xDEAD;
idev->id.product = 0xBEEF;
idev->id.version = S3C2410TSVERSION; irq = platform_get_resource_byname(pdev, IORESOURCE_IRQ, "int_ts");
if (!irq) {
dev_err(dev, "get irq resource int_ts failed.\n");
ret = -EINVAL;
goto err;
}
ret = devm_request_irq(dev, irq->start, stylus_updown, IRQF_ONESHOT, "int_ts", NULL);
if (ret < ){
dev_err(dev, "request irq tsirq %d failed.\n", irq->start);
goto err;
} irq = platform_get_resource_byname(pdev, IORESOURCE_IRQ, "int_adc_s");
if (!irq) {
dev_err(dev, "get irq resource int_adc_s failed.\n");
ret = -EINVAL;
goto err;
}
ret = devm_request_irq(dev, irq->start, stylus_action, IRQF_ONESHOT, "int_adc_s", NULL);
if (ret < ) {
dev_err(dev, "request irq adcirq %d failed.\n", irq->start);
goto err;
} dev_info(dev, "%s successfully loaded\n", tq2440ts_name);
input_register_device(idev); return ;
err:
clk_disable(adc_clock);
return ret;
} static const struct of_device_id tq2440ts_match[] = {
{ .compatible = "tq2440,ts", .data = (void *) },
{},
}; static struct platform_driver tq2440ts_driver = {
.probe = tq2440ts_probe,
.driver = {
.name = "tq2440ts",
.of_match_table = of_match_ptr(tq2440ts_match),
},
}; static int __init tq2440ts_init(void)
{
return platform_driver_register(&tq2440ts_driver);
} static void __exit tq2440ts_exit(void)
{
platform_driver_unregister(&tq2440ts_driver);
} module_init(tq2440ts_init);
module_exit(tq2440ts_exit); MODULE_LICENSE("GPL");
[root@tq2440 ]# cat /proc/interrupts
CPU0
: s3c-eint Edge eth0
: s3c Edge s3c2410-rtc tick
: s3c Edge samsung_time_irq
: s3c Edge 4d000000.fb
: s3c Edge ohci_hcd:usb1
: s3c Edge .i2c
: s3c Edge s3c2410-rtc alarm
: s3c-level Level .serial
: s3c-level Level .serial
: s3c-level Edge int_ts
: s3c-level Edge int_adc_s
: s3c-level Edge .watchdog
Err:
使用hexdump /dev/input/event0:
[root@tq2440 ]# hexdump /dev/input/event0
cb74 386e bc0b 000b
cb74 386e bc0b 000b 01e4
cb74 386e bc0b 000b 014a
cb74 386e bc0b 000b
cb74 386e bc0b 000b
cb74 386e 0a4e 000c 01dc
cb74 386e 0a4e 000c 01fa
cb74 386e 0a4e 000c
cb74 386e 585a 000c 014a
cb74 386e 585a 000c
二、移植tslib
#!/bin/bash ./autogen.sh mkdir install ./configure \
--prefix="`pwd`/install" \
--host=arm-linux \
ac_cv_func_malloc_0_nonnull=yes make
make install
安装完成后,可以看到:
$ls install
bin/ etc/ include/ lib/ share/
echo "Set Env for Tslib"
export TSLIB_ROOT=/
export TSLIB_TSDEVICE=/dev/input/event0
export TSLIB_CONFFILE=$TSLIB_ROOT/etc/ts.conf
export TSLIB_PLUGINDIR=$TSLIB_ROOT/lib/ts
export TSLIB_CALIBFILE=/etc/pointercal
export TSLIB_CONSOLEDEVICE=none
export TSLIB_FBDEVICE=/dev/fb0
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$TSLIB_ROOT/lib
修改完成后,重新启动开发板。
三、测试
[root@tq2440 ]# ts_calibrate
xres = , yres =
Took samples...
Top left : X = Y =
Took samples...
Top right : X = Y =
Took samples...
Bot right : X = Y =
Took samples...
Bot left : X = Y =
Took samples...
Center : X = Y =
582.617065 -0.602301 -0.108929
-72.806641 0.023253 0.396149
Calibration constants: - - -
[root@tq2440 ]# ts_test
946785862.424089:
946785862.444036:
946785865.264038:
946785865.284058:
946785865.519036:
946785865.539107:
946785865.559054:
946785865.829038:
基于设备树的TQ2440触摸屏驱动移植的更多相关文章
- 基于设备树的TQ2440的中断(2)
下面以按键中断为例看看基于设备数的中断的用法: 设备树: tq2440_key { compatible = "tq2440,key"; interrupt-parent = &l ...
- 基于设备树的TQ2440的中断(1)
作者 姓名:彭东林 E-mail:pengdonglin137@163.com QQ:405728433 平台 板子:TQ2440 内核:Linux-4.9 u-boot: 2015.04 工具链: ...
- 基于设备树的TQ2440 DMA学习(3)—— DMA控制器驱动
作者 彭东林pengdonglin137@163.com 平台 TQ2440Linux-4.9 概述 上一篇直接操作DMA控制器实现了一个mem2mem的DMA传输,但是这样不符合linux driv ...
- 基于设备树的TQ2440 DMA学习(4)—— client驱动
作者 彭东林pengdonglin137@163.com 平台 TQ2440Linux-4.9 概述 前面分析了DMA控制器驱动,下面我们调用DMAENGINE的API写一个MEM2MEM的驱动 正文 ...
- 基于设备树的TQ2440 DMA学习(1)—— 芯片手册
作者 彭东林pengdonglin137@163.com 平台 TQ2440内核Linux4.9 概述 一直想抽时间学习一下DMA驱动,今天就以S3C2440为例,这款芯片的DMA控制器足够简单,也比 ...
- 基于设备树的TQ2440 DMA学习(2)—— 简单的DMA传输
作者 彭东林 pengdonglin137@163.com 平台 TQ2440 Linux-4.9 概述 上一篇博客分析了DMA控制器的寄存器,循序渐进,下面我们直接操作DMA控制器的寄存器实 ...
- 基于设备树的controller学习(2)
作者 彭东林 pengdonglin137@163.com 平台 TQ2440 Linux-4.10.17 概述 上一篇大概介绍了一下demo-controller的结构,下面结合驱动分析. 正文 ...
- 基于设备树的controller学习(1)
作者 彭东林pengdonglin137@163.com 平台 TQ2440Linux-4.10.17 概述 在设备树中我们经常见到诸如"#clock-cells"."# ...
- 基于设备树的led驱动程序
#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include ...
随机推荐
- python代码在IDE下调试设置命令行参数
带命令行参数的代码在IDE下调试,需要把参数赋值,本文mark一下具体的命令行参数在代码中赋值方法. if __name__ == "__main__": sys.argv = [ ...
- centos6.5环境DNS-本地DNS服务器bind的搭建
centos6.5环境DNS-本地DNS服务器bind的搭建 域名系统(英文:Domain Name System,缩写:DNS)是因特网的一项服务.它作为将域名和IP地址相互映射的一个分布式数据库, ...
- 二十三、springboot之session共享
通过redis实现session共享 SpringBoot集成springsession 1.引入依赖(gradle方式) dependencies { compile('org.springfram ...
- Java多态概述
多态 所谓多态,实际上就是一个对象的多种状态: 下面例子中,Tiger可以看做Tiger,也可以看做Animal Cat 可以看做Cat,也可以看做Animal Dog 可以看做Dog,也可以看做A ...
- private,protected,public和default的区别
private,protected,public和default的区别 private,protected,public和default作为Java中的访问修饰符,他们的最大区别就在于访问权限不同: ...
- iis6 和iis7s上整个网站重定向
iis6 和iis7s上整个网站重定向 重定向作用: 重定向(Redirect)就是通过各种方法将各种网络请求重新定个方向转到其它位置.举例说明:就像我XX公司,之前用的网络域名是“www.bb. ...
- IOC创建对象的几种方式
接上一篇IOC入门 IOC创建对象的几种方式 1)调用无参数构造器 2)带参数构造器 3)工厂创建对象 工厂类:静态方法创建对象 工厂类:非静态方法创建对象 1.对之前的User类进行一些修改,加上一 ...
- 发送统计邮件shell脚本
#!/bin/bash#作者:Presley#时间:2018.07.16#监控阿里云aaa库的py_weixin_product_close_rating_info 和 py_weixin_produ ...
- 9-2 The Tower of Babylon uva437 (DP)
题意:有n种立方体 每种都有无穷多个 要求选一些立方体叠成一根尽量高的柱子 (可以自行选择哪条边为高 )使得每个立方体的底面都严格小于他下方的立方体 为DAG模型 在任何时候 只有顶面的尺寸会影响到 ...
- 深刻理解this的指向和var 定义的变量的问题
一般来说,在编程语言里我们常见的变量作用域就是词法作用域与动态作用域(Dynamic Scope),绝大部分的编程语言都是使用的词法作用域.词法作用域注重的是所谓的Write-Time,即编程时的上下 ...