CAN总线报文浅析
CAN的报文格式
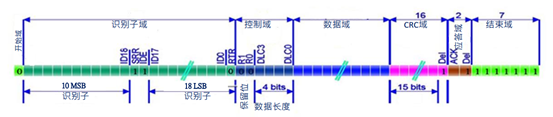
在总线中传送的报文,每帧由7部分组成。CAN协议支持两种报文格式,其唯一的不同是标识符(ID)长度不同,标准格式为11位,扩展格式为29位。
在标准格式中,报文的起始位称为帧起始(SOF),然后是由11位标识符和远程发送请求位(RTR)组成的仲裁场。RTR位标明是数据帧还是请求帧,在请求帧中没有数据字节。
控制场包括标识符扩展位(IDE),指出是标准格式还是扩展格式。它还包括一个保留位 (ro),为将来扩展使用。它的最后四个位用来指明数据场中数据的长度(DLC)。数据场范围为0~8个字节,其后有一个检测数据错误的循环冗余检查(CRC)。
应答场(ACK)包括应答位和应答分隔符。发送站发送的这两位均为隐性电平(逻辑1),这时正确接收报文的接收站发送主控电平(逻辑0)覆盖它。用这种方法,发送站可以保证网络中至少有一个站能正确接收到报文。
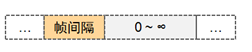
报文的尾部由帧结束标出。在相邻的两条报文间有一很短的间隔位,如果这时没有站进行总线存取,总线将处于空闲状态。
如图11所示,具体某一位或某几位下面会详细介绍。
图11 CAN总线报文结构
数据帧
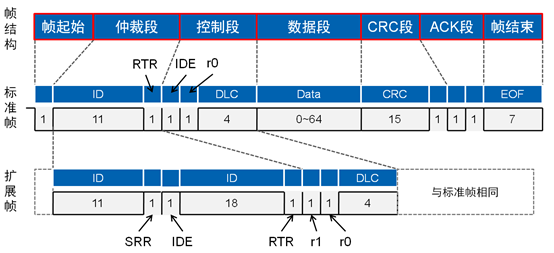
数据帧是使用最多的帧,结构上由7段组成,其中根据仲裁段ID码长度的不同,分为标准帧(CAN2.0A)和扩展帧(CAN2.0B)。
数据帧是由:帧起始,仲裁断,控制端,数据段,CRC段,ACK段和帧结束构成。
如图21所示(具体的帧结构下面会详细介绍)。
图2–1数据帧类型及结构
帧起始和帧结束
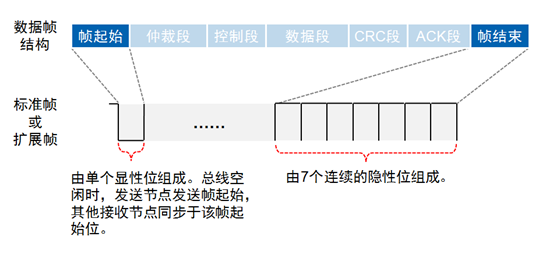
帧起始:由单个显性位组成,总线空闲时,发送节点发送帧起始,其他接收节点同步于该帧起始位。
帧结束:由7个连续的隐形位组成。
(注:显性电平和隐性电平是相对于CAN_H和CAN_L而言的差分信号电平,并非TTL电平上的高低电平,需要注意)如图2-2所示。
图2–2帧起始和帧结束
仲裁段
CAN-bus是如何解决多个节点同时发送数据,即总线竞争的问题?该问题由仲裁段给出答案。
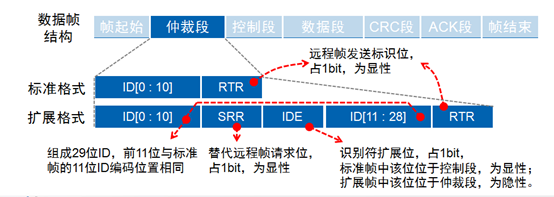
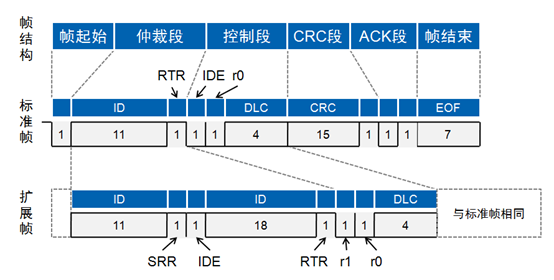
CAN-bus并没有规定节点的优先级,但通过仲裁段帧ID规定了数据帧的优先级。根据CAN2.0标准版本不同,帧ID分为11位和29位两种。如图23所示
图2–3数据帧结构
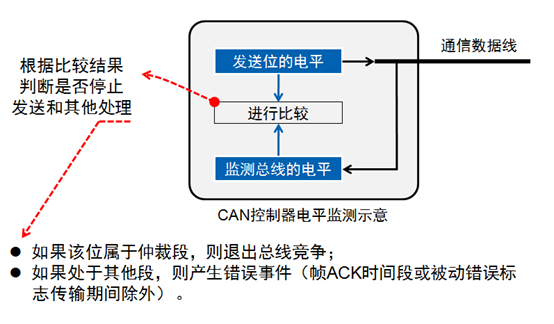
如图24所示CAN控制器在发送数据的同时监测数据线的电平是否与发送数据对应电平相同,如果不同,则停止发送并做其他处理。
图2–4仲裁处理
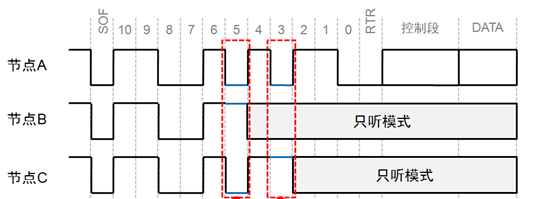
假设节点A、B和C都发送相同格式相同类型的帧,如标准格式数据帧,它们竞争总线的过程是(如图16所示):
图2–5仲裁机制
从该分析过程得出结论是:帧ID值越小,优先级越高;
对于同为扩展格式数据帧、标准格式远程帧和扩展格式远程帧的情况同理
控制段
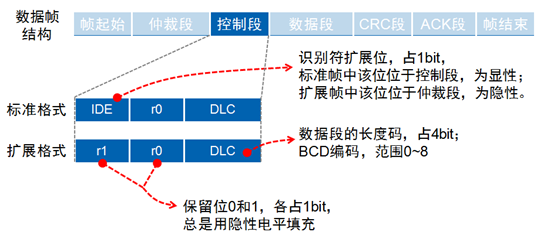
控制段共6位,标准帧的控制段由扩展帧标志位IDE、保留位r0和数据长度代码DLC组成;扩展帧控制段则由IDE、r1、r0和DLC组成如图17所示。
图2–6数据帧结构
数据段
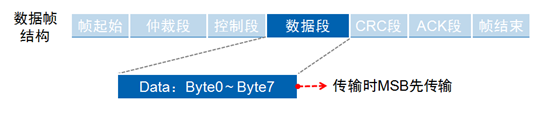
一个数据帧传输的数据量为0~8个字节,这种短帧结构使得CAN-bus实时性很高,非常适合汽车和工控应用场合如图27所示。
图2–7数据段
数据量小,发送和接收时间短,实时性高,被干扰的概率小,抗干扰能力强。
CRC段
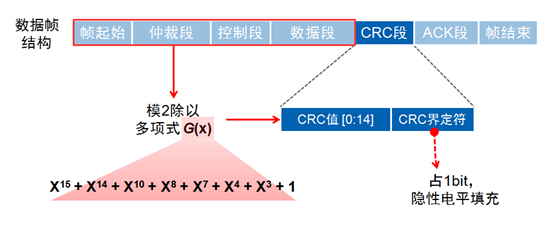
CAN-bus使用CRC校验进行数据检错,CRC校验值存放于CRC段。 CRC校验段由15位CRC值和1位CRC界定符构成如图28所示。
图2–8CRC段
ACK段
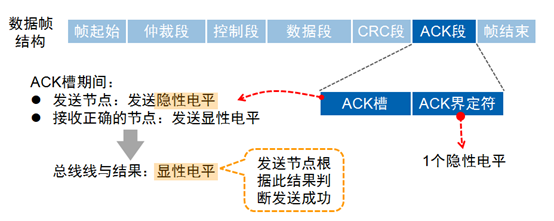
当一个接收节点接收的帧起始到CRC段之间的内容没发生错误时,它将在ACK段发送一个显性电平如图29所示。
图2–9 ACK段
远程帧
与数据帧相比,远程帧结构上无数据段,由6个段组成,同理分为标准格式和扩展格式,且RTR位为1(隐性电平)如图31所示。
图3–1远程帧结构
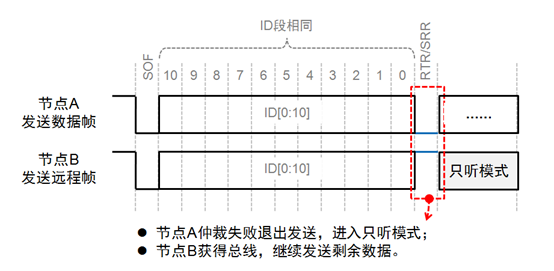
如下图所示由于数据帧的RTR位为显性电平,远程帧的RTR位为隐性电平。
所以帧格式和帧ID都相同情况下,数据帧的优先级比远程帧优先级高如图32所示:
图3–2数据帧于远程帧仲裁机制
图3–3数据帧远程帧比较
数据帧与远程帧的区别如图33所示。
错误帧
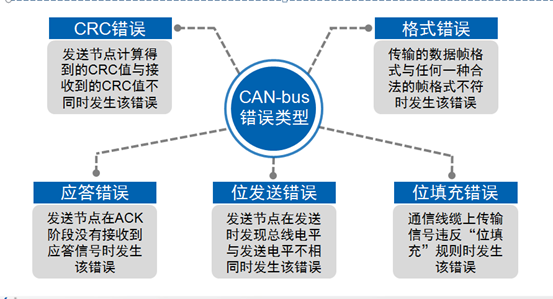
尽管CAN-bus是可靠性很高的总线,但依然可能出现错误;CAN-bus的错误类型共有5种(如图41所示)。
图4–1错误帧类型
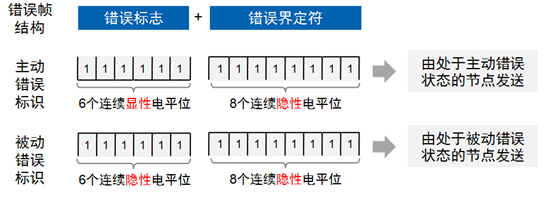
当出现5种错误类型之一时,发送或接收节点将发送错误帧。错误帧的结构如下,其中错误标识分为主动错误标识和被动错误标识如图42所示。
图4–2错误帧电平结构
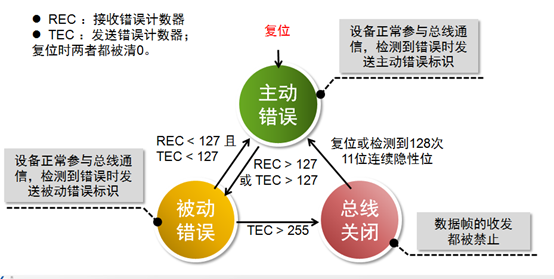
为防止自身由于某些原因导致无法正常接收的节点一直发送错误帧,干扰其他节点通信,CAN-bus规定了节点的3种状态及其行为如图43所示。
图4–3错误处理机制
(注:这些错误处理的机制是由硬件自主完成的这样做的目的就是只要CAN在收到数据肯定是正确的数据)。
过载帧与帧间隔
过载帧
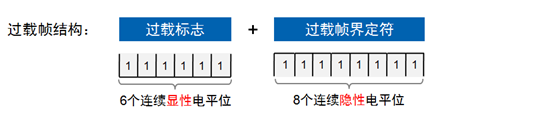
当某个接收节点没有做好接收下一帧数据的准备时,将发送过载帧以通知发送节点;过载帧由过载标志和过载帧界定符组成如所示图51。
图5–1过载帧结构
由于存在多个节点同时过载且过载帧发送有时间差问题,可能出现过载标志叠加后超过6个位的现象如所示图52。
图5–2过载帧具体结构
帧间隔
帧间隔用于将数据帧或远程帧和他们之前的帧分离开,但过载帧和错误帧前面不会插入帧间隔。
帧间隔过后,如果无节点发送帧,则总线进入空闲。
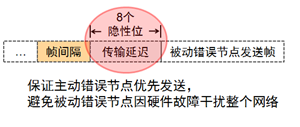
帧间隔过后,如果被动错误节点要发送帧,则先发送8个隐性电平的传输延迟,再发送帧。
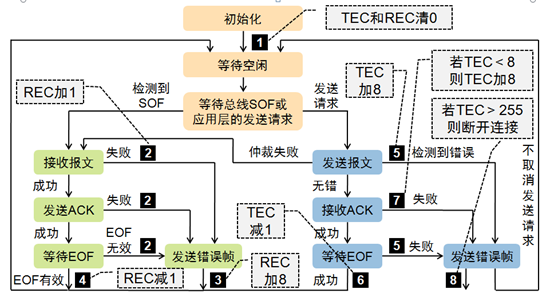
CAN总线发送总流程
CAN-bus整个链路层处理数据的流程是如图61所示:
图6–1CAN总线发送总流程
参考资料
《项目驱动--CAN-BUS现场总线基础教程----周立功,黄晓清》。
《现场总线技术及其应用第二版–清华大学出版社》。



CAN总线报文浅析的更多相关文章
- Android Otto框架浅析
今天要介绍的是一个Android中使用得比較多的android 事件总线 EventBus模式的一个框架Otto. Otto 官网:http://square.github.io/otto/ 一.An ...
- Intel格式与Motorola格式的区别
Intel低字节在前 Motorola高字节在前 在进行CAN总线通信设计或者测试过程中,经常看到CAN总线信号的编码格式有两种定义:Intel格式与Motorola格式.究竟两种编码格式有 ...
- 《2013传智播客视频》-wmv,avi,mp4.目录
\!--14俄罗斯方块\视频\.复习.avi; \!--14俄罗斯方块\视频\ 复习.avi; \!--14俄罗斯方块\视频\ 形状旋转.avi; \!--14俄罗斯方块\视频\ 判断形状能否变形.a ...
- 自学工业控制网络之路1.3-典型的现场总线介绍FF
返回 自学工业控制网络之路 自学工业控制网络之路1.3-典型的现场总线介绍FF 1994年6月,ISP和WORLDFIP合并成立现场总线基金会FF.1998年,FF基金会开发了HSE 10/100Mb ...
- 【车联网T-BOX】基于CANoe实现的远程服务业务自动化测试方案
为满足项目过程中不同阶段绝大部分测试需求,更方便快捷构造测试场景,支持异常场景测试.更早介入,不依赖周边ECU的稳定情况,专注于被测ECU.更经济,不加油,不充电,时间节省,物料节省等维度考虑.我们需 ...
- Go入门教程
本人录制的Go入门视频 20小时快速入门go语言视频:https://pan.baidu.com/s/1jJPsThk 基础编程 01.Go语言介绍02.环境搭建03.第一个Go程序 04.命名.变量 ...
- Intel与Motorola区别
Intel低字节在前 Motorola高字节在前 在进行CAN总线通信设计或者测试过 程中,经常看到CAN总线信号的编码格式有两种定义:Intel格式与Motorola格式.究竟两种编码格式有什 ...
- 列车网络智能诊断工具链—MVB智能诊断仪
由于MVB网络采用分布式网络结构,各组网设备分布在不同电气柜,甚至是在不同车辆上,各组网设备往往来自于不同供应商,这给MVB网络调试及诊断带来了很大的难度.目前MVB网络调试及故障排查,主要是通过仪器 ...
- 浅析HTTP协议的请求报文和响应报文
1.HTTP协议与报文简介 HTTP(hypertext transport protocol),即超文本传输协议.这个协议详细规定了浏览器和万维网服务器之间互相通信的规则. 而客户端与服务端通信时 ...
随机推荐
- Easyui datagrid 实现表格记录拖拽
datagrid 实现表格记录拖拽 by:授客 QQ:1033553122 测试环境 jquery-easyui-1.5.3 jquery-easyui-datagrid-dnd 下载地址: http ...
- 基于WanAndroid开放API实现的文章阅读APP
简介 基于WanAndroid开放API开发的技术文章阅读App.主要功能包括:首页.体系.项目.公众号.搜索.登录.收藏.夜间模式等. 用到的第三方框架 RxJava RxAndroid Retro ...
- c/c++ linux 进程间通信系列3,使用socketpair,pipe
linux 进程间通信系列3,使用socketpair,pipe 1,使用socketpair,实现进程间通信,是双向的. 2,使用pipe,实现进程间通信 使用pipe关键点:fd[0]只能用于接收 ...
- pycharm导入自定义py文件出错
1. 被导入的py文件不能以数字开头,否则会报错,红色波浪线
- python--继承--方法的重写---和父类的扩展
1.方法的重写 父类的方法不能满足子类的需要,可以对方法重写 具体的实现方式,就相当于在子类中定义了一个和父类同名的方法并实现 重写之后只会对子类的方法调用,而不会调用父类封装的方法 2.对父类方法进 ...
- windows下安装MongoDB扩展和配置
windows下安装MongoDB扩展和配置 1.下载mongoDB扩展,根据当前php版本进行下载 地址如下:http://pecl.php.net/package/mongo 我本地php版本是 ...
- 我的第一个python web开发框架(34)——后台管理系统权限设计
框架底层和接口终于改造完成了,小白再次找到老菜. 小白:老大,上次你对后台权限系统简单的讲了一下,我一点头绪都没有,现在有空完整的说一说吗? 老菜:说到权限系统,要讲明白真不容易,权限系统并不是越复杂 ...
- Kerberos原理
前些日子为了搞清楚Kerberos原理,把MIT的Kerberos经典对话看了几遍,终于有了一个稍微清晰的认识,这里稍微记录下,因为Kerberos是使用传统加密技术实现的一个认证机制,所以顺便备忘下 ...
- Java之匿名内部类详解
前言 本文讲解Java中最后一种内部类,叫做匿名内部类.顾名思义,所谓的匿名内部类就是一个没有显式的名字的内部类,在实际开发中,此种内部类用的是非常多的. 匿名内部类 本质:匿名内部类会隐式的继承一个 ...
- web框架开发-路由控制
URL配置(URLconf)就像Django 所支撑网站的目录.它的本质是URL与要为该URL调用的视图函数之间的映射表:你就是以这种方式告诉Django,对于客户端发来的某个URL调用哪一段逻辑代码 ...