ROS知识(13)----基于catkin的包安装
ROS软件包开发完成后,需要安装包,如果你用的是catkin创建的工作空间,那么即可使用命令"catkin_make install"完成此项任务.下面介绍其安装的过程:
1.源码准备
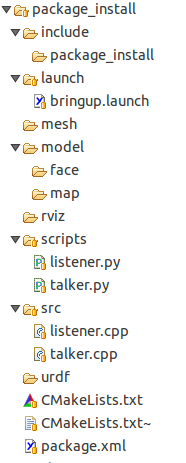
准备好需要安装的代码,通常可以使用catkin来创建工作空间,包和编译整个项目.本例子假定工作空间为catkin_ws,包名为package_install.目录如下图所示:
2.编辑CMakeLists.txt
打开package/CMakeLists.txt,在文件末尾添加添加如下的代码:
#############
## Install ##
############# # all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html ## Mark executable scripts (Python etc.) for installation
## 添加python程序.in contrast to setup.py, you can choose the destination
install(PROGRAMS
scripts/talker.py
scripts/listener.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
) ## 添加可执行文件或者库文件,Mark executables and/or libraries for installation
install(TARGETS talker_node listener_node
ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
) ## 添加头文件.Mark cpp header files for installation
install(DIRECTORY include/${PROJECT_NAME}/
DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
FILES_MATCHING PATTERN "*.h"
PATTERN ".svn" EXCLUDE
)
## 添加资源文件的目录,例如文件夹:urdf mesh rviz,其下的所有子目录的文件也会安装到相应的目录下.
install(DIRECTORY model
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install(DIRECTORY urdf
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install(DIRECTORY mesh
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install(DIRECTORY rviz
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
) ## 添加资源文件.Mark other files for installation (e.g. launch and bag files, etc.)
install(FILES
launch/bringup.launch
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/launch
)
3.编译
打开命令终端,到catkin_ws目录下,执行如下命令:
catkin_make install
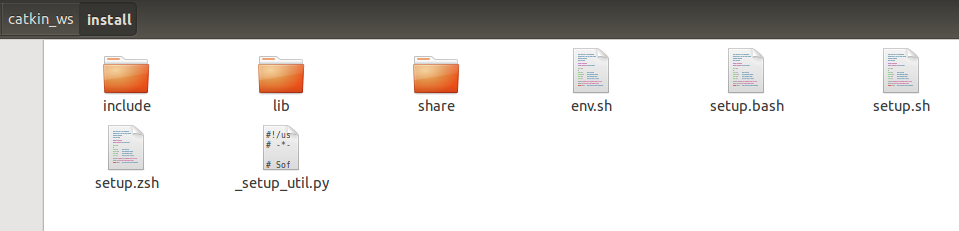
安装的文件会生成在目录catkin_ws/install下.目录的结构如下图所示
4.运行
a.首先,可将install整个文件夹随意拷贝到一个目录下;然后,打开命令终端,到该目录install下,执行如下命令:
source devel/setup.bash
b.打开命令终端,运行程序,执行如下命令:
roslaunch package_install bringup.launch
这样就可以把安装的程序跑起来了.
5.源码
源码下载:catkin_ws.rar
ROS知识(13)----基于catkin的包安装的更多相关文章
- Mysql安装 ----> 基于源码包安装
1)基于源码包安装MySQL [root@localhost ~]# rpm -q mysql mysql-server mariadb mairadb-server //检查有没 ...
- ROS知识(3)----功能包package编译的两种方式
ROS的包编译有两种方法(我知道的),一种是用rosmake,这种方法简单:另一种是用catkin_make,这种方法更方便包的管理和开发.这两种方法都是先建立工作空间workspace(类似于vs下 ...
- 【mysql】mac上基于tar.gz包安装mysql服务
一.准备工作 (1)下载mysql-5.7.21-macos10.13-x86_64.tar.gz,并将该压缩包移动至/usr/local目录下 (2)解压压缩包 二.安装 (1)将解压的包重命名为m ...
- ROS知识(1)----ROS Jade安装
ROS入门难,进去之后会是很简单,这是很多人的经验.但是今天安装ROS就吃了闭门羹,安装成功后,回顾发现,关键是操作系统Ubantu14.04没有安装好,一些系统包没有及时更新导致的.这里总结下ROS ...
- 基于linux下的NIST数字测试包安装过程
基于linux下的NIST数字测试包安装过程 1. 首先解决windows文件不能粘贴到Ubuntu的问题 选择利用VMware Tools进行解决 打开虚拟机VMware Workstation,启 ...
- ROS知识(5)----消息与服务的示例
ROS中已经定义了较多的标准类型的消息,你可以用在这些标准类型的消息上再自定义自己的消息类型.这个在复杂数据传输很有用,例如节点和服务器进行交互时,就可能用到传输多个参数到服务器,并返回相应的结果.为 ...
- (转)-编写第一个ROS(创建工作空间workspace和功能包package)
原文网址:http://www.cnblogs.com/liuamin/p/5704281.html 刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配 ...
- 编写第一个ROS(创建工作空间workspace和功能包package)
刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配置好ROS. 1.创建工作空间(workspace) 我们所创建功能包package,应该全部放到一个 ...
- Linux知识(1)----U盘安装Ubantu14.04系统
由于需要用到ROS(Robot Operating System)机器人操作系统,该系统是基于Linux系统Ubantu14.04的,第一次安装接触Linux点点生惧,但我知道并没那么难弄,况且还是U ...
随机推荐
- 新浪的wap网站,发现原来我们的head存在着这样的差异
前一段时间一直被wap网站的自适应困惑…… 仔细研究了一下新浪的wap网站,发现原来我们的head存在着这样的差异…… <%@page contentType="text/html;c ...
- structc 开源框架介绍
引言 - 一切才刚刚开始 structc 是 C 结构基础库. 简单可复用. structc - https://github.com/wangzhione/structc 之前也描述过几次 stru ...
- linux系统时钟和硬件时钟不一致
在做DB2 集群复制的时候要求两台主机时间相互一致. 但是在一台主机上系统时间和硬件时间相差12个小时左右:手动同步后,重启后又相差12个小时左右. 为什么会是这样的,先介绍下系统时钟和硬件时钟的区别 ...
- Go 命令行总结
go build:已当前目录作为package进行编译,将当前目录下的所有文件编译成package文件,文件名与所在的目录同名. go install: 分两步操作:1.先执行go build进行编译 ...
- python基础--类的方法
一:类的方法说明 类的方法分为实例方法,析构方法,构造方法,类方法,静态方法,属性方法,等等 类方法和静态方法都可以被类和类实例调用,类实例方法仅可以被类实例调用 类方法的隐含调用参数是类,而类实例方 ...
- 读书笔记--C陷阱与缺陷(六)
第六章 1.预处理器:预处理器先对代码进行必要的转换处理,简化编程者的工作. 它的重要原因有以下两点: a. 假如要将程序中出现的所有实例都加以修改,但希望只改动程序一处数值,重新编译实现. 预处理器 ...
- SQL语句资料
--语 句 功 能 --数据操作 SELECT --从数据库表中检索数据行和列 INSERT --向数据库表添加新数据行 DELETE --从数据库表中删除数据行 UPDATE --更新数据 ...
- CVE-2012-0003 Microsoft Windows Media Player ‘winmm.dll’ MIDI文件解析远程代码执行漏洞 分析
[CNNVD]Microsoft Windows Media Player ‘winmm.dll’ MIDI文件解析远程代码执行漏洞(CNNVD-201201-110) Microsoft Wi ...
- 搜索入门之dfs--经典的迷宫问题解析
今天来谈一下dfs的入门,以前看到的dfs入门,那真的是入门吗,都是把dfs的实现步骤往那一贴,看完是知道dfs的步骤了,但是对于代码实现还是没有概念.今天准备写点自己的心得,真的是字面意思--入门. ...
- Jquery Datatable自动生成序号
公司项目里,使用的是jquerydatatable框架来展示数据的,在使用的时候遇到一个问题,就是要自动生成序号,且在分页的时候,下一页的序号紧跟着前一页的序号,下面是代码: "fnDraw ...