μC/OS-III---I笔记3---时间管理
时间管理相关函数,其实深入根本的理解就是一些对时间任务相关变量,数据结果进行修改的函数这样方便对应任务查找延时等时间相关的任务有没有到期。前面的时间相关的函数是这些操作的基
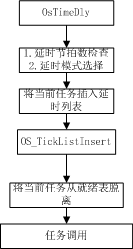
1.延时函数 OsTImeDly
函数是一个按时钟节拍定时的延时函数 ,默认是将当前执行的任务延时一定时钟节拍。
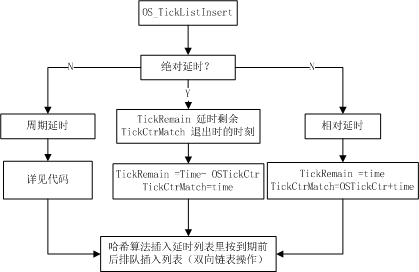
OS_OPT_TIME_DLY 此选项为相对延时 比如5S后
OS_OPT_TIME_TIMEOUT 同上
OS_OPT_TIME_MATCH 绝对延时 比如延时到系统开始运行后的一个时钟节拍点
OS_OPT_TIME_PERIODIC 周期延时 与相对延时差不多但是相对长时间周期性延时时更准确一些
void OSTimeDly (OS_TICK dly,
OS_OPT opt,
OS_ERR *p_err)
{
CPU_SR_ALLOC(); #ifdef OS_SAFETY_CRITICAL
if (p_err == (OS_ERR *)0) {
OS_SAFETY_CRITICAL_EXCEPTION();
return;
}
#endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u
if (OSIntNestingCtr > (OS_NESTING_CTR)0u) { /* Not allowed to call from an ISR */
*p_err = OS_ERR_TIME_DLY_ISR;
return;
}
#endif if (OSSchedLockNestingCtr > (OS_NESTING_CTR)0u) { /* Can't delay when the scheduler is locked */
*p_err = OS_ERR_SCHED_LOCKED;
return;
} switch (opt) {
case OS_OPT_TIME_DLY:
case OS_OPT_TIME_TIMEOUT:
case OS_OPT_TIME_PERIODIC:
if (dly == (OS_TICK)0u) { /* 0 means no delay! */
*p_err = OS_ERR_TIME_ZERO_DLY;
return;
}
break; case OS_OPT_TIME_MATCH:
break; default:
*p_err = OS_ERR_OPT_INVALID;
return;
} OS_CRITICAL_ENTER();
OSTCBCurPtr->TaskState = OS_TASK_STATE_DLY;
OS_TickListInsert(OSTCBCurPtr,
dly,
opt,
p_err);
if (*p_err != OS_ERR_NONE) {
OS_CRITICAL_EXIT_NO_SCHED();
return;
}
OS_RdyListRemove(OSTCBCurPtr); /* Remove current task from ready list */
OS_CRITICAL_EXIT_NO_SCHED();
OSSched(); /* Find next task to run! */
*p_err = OS_ERR_NONE;
}
OSTimeDly
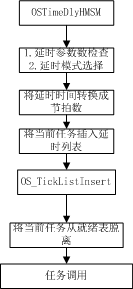
2.OSTimeDlyHMSM
函数是一个按时间定时的延时函数 ,默认是将当前执行的任务延时一段时间。
void OSTimeDlyHMSM (CPU_INT16U hours,
CPU_INT16U minutes,
CPU_INT16U seconds,
CPU_INT32U milli,
OS_OPT opt,
OS_ERR *p_err)
{
#if OS_CFG_ARG_CHK_EN > 0u
CPU_BOOLEAN opt_invalid;
CPU_BOOLEAN opt_non_strict;
#endif
OS_OPT opt_time;
OS_RATE_HZ tick_rate;
OS_TICK ticks;
CPU_SR_ALLOC(); #ifdef OS_SAFETY_CRITICAL
if (p_err == (OS_ERR *)0) {
OS_SAFETY_CRITICAL_EXCEPTION();
return;
}
#endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u
if (OSIntNestingCtr > (OS_NESTING_CTR)0u) { /* Not allowed to call from an ISR */
*p_err = OS_ERR_TIME_DLY_ISR;
return;
}
#endif if (OSSchedLockNestingCtr > (OS_NESTING_CTR)0u) { /* Can't delay when the scheduler is locked */
*p_err = OS_ERR_SCHED_LOCKED;
return;
} opt_time = opt & OS_OPT_TIME_MASK; /* Retrieve time options only. */
switch (opt_time) {
case OS_OPT_TIME_DLY:
case OS_OPT_TIME_TIMEOUT:
case OS_OPT_TIME_PERIODIC:
if (milli == (CPU_INT32U)0u) { /* Make sure we didn't specify a 0 delay */
if (seconds == (CPU_INT16U)0u) {
if (minutes == (CPU_INT16U)0u) {
if (hours == (CPU_INT16U)0u) {
*p_err = OS_ERR_TIME_ZERO_DLY;
return;
}
}
}
}
break; case OS_OPT_TIME_MATCH:
break; default:
*p_err = OS_ERR_OPT_INVALID;
return;
} #if OS_CFG_ARG_CHK_EN > 0u /* Validate arguments to be within range */
opt_invalid = DEF_BIT_IS_SET_ANY(opt, ~OS_OPT_TIME_OPTS_MASK);
if (opt_invalid == DEF_YES) {
*p_err = OS_ERR_OPT_INVALID;
return;
} opt_non_strict = DEF_BIT_IS_SET(opt, OS_OPT_TIME_HMSM_NON_STRICT);
if (opt_non_strict != DEF_YES) {
if (milli > (CPU_INT32U)999u) {
*p_err = OS_ERR_TIME_INVALID_MILLISECONDS;
return;
}
if (seconds > (CPU_INT16U)59u) {
*p_err = OS_ERR_TIME_INVALID_SECONDS;
return;
}
if (minutes > (CPU_INT16U)59u) {
*p_err = OS_ERR_TIME_INVALID_MINUTES;
return;
}
if (hours > (CPU_INT16U)99u) {
*p_err = OS_ERR_TIME_INVALID_HOURS;
return;
}
} else {
if (minutes > (CPU_INT16U)9999u) {
*p_err = OS_ERR_TIME_INVALID_MINUTES;
return;
}
if (hours > (CPU_INT16U)999u) {
*p_err = OS_ERR_TIME_INVALID_HOURS;
return;
}
}
#endif /* Compute the total number of clock ticks required.. */
/* .. (rounded to the nearest tick) */
tick_rate = OSCfg_TickRate_Hz;
ticks = ((OS_TICK)hours * (OS_TICK)3600u + (OS_TICK)minutes * (OS_TICK)60u + (OS_TICK)seconds) * tick_rate
+ (tick_rate * ((OS_TICK)milli + (OS_TICK)500u / tick_rate)) / (OS_TICK)1000u; if (ticks > (OS_TICK)0u) {
OS_CRITICAL_ENTER();
OSTCBCurPtr->TaskState = OS_TASK_STATE_DLY;
OS_TickListInsert(OSTCBCurPtr,
ticks,
opt_time,
p_err);
if (*p_err != OS_ERR_NONE) {
OS_CRITICAL_EXIT_NO_SCHED();
return;
}
OS_RdyListRemove(OSTCBCurPtr); /* Remove current task from ready list */
OS_CRITICAL_EXIT_NO_SCHED();
OSSched(); /* Find next task to run! */
*p_err = OS_ERR_NONE;
} else {
*p_err = OS_ERR_TIME_ZERO_DLY;
}
}
OSTimeDlyHMSM
3.任务插入节拍列表操作
void OS_TickListInsert (OS_TCB *p_tcb,
OS_TICK time,
OS_OPT opt,
OS_ERR *p_err)
{
OS_TICK tick_delta;
OS_TICK tick_next;
OS_TICK_SPOKE *p_spoke;
OS_TCB *p_tcb0;
OS_TCB *p_tcb1;
OS_TICK_SPOKE_IX spoke; if (opt == OS_OPT_TIME_MATCH) { /* Task time is absolute. */
tick_delta = time - OSTickCtr - 1u;
if (tick_delta > OS_TICK_TH_RDY) { /* If delay already occurred, ... */
p_tcb->TickCtrMatch = (OS_TICK )0u;
p_tcb->TickRemain = (OS_TICK )0u;
p_tcb->TickSpokePtr = (OS_TICK_SPOKE *)0;
*p_err = OS_ERR_TIME_ZERO_DLY; /* ... do NOT delay. */
return;
}
p_tcb->TickCtrMatch = time;
p_tcb->TickRemain = tick_delta + 1u; } else if (time > (OS_TICK)0u) {
if (opt == OS_OPT_TIME_PERIODIC) { /* Task time is periodic. */
tick_next = p_tcb->TickCtrPrev + time;
tick_delta = tick_next - OSTickCtr - 1u;
if (tick_delta < time) { /* If next periodic delay did NOT already occur, ... */
p_tcb->TickCtrMatch = tick_next; /* ... set next periodic delay; ... */
} else {
p_tcb->TickCtrMatch = OSTickCtr + time; /* ... else reset periodic delay. */
}
p_tcb->TickRemain = p_tcb->TickCtrMatch - OSTickCtr;
p_tcb->TickCtrPrev = p_tcb->TickCtrMatch; } else { /* Task time is relative to current. */
p_tcb->TickCtrMatch = OSTickCtr + time;
p_tcb->TickRemain = time;
} } else { /* Zero time delay; ... */
p_tcb->TickCtrMatch = (OS_TICK )0u;
p_tcb->TickRemain = (OS_TICK )0u;
p_tcb->TickSpokePtr = (OS_TICK_SPOKE *)0;
*p_err = OS_ERR_TIME_ZERO_DLY; /* ... do NOT delay. */
return;
} spoke = (OS_TICK_SPOKE_IX)(p_tcb->TickCtrMatch % OSCfg_TickWheelSize);
p_spoke = &OSCfg_TickWheel[spoke]; if (p_spoke->NbrEntries == (OS_OBJ_QTY)0u) { /* First entry in the spoke */
p_tcb->TickNextPtr = (OS_TCB *)0;
p_tcb->TickPrevPtr = (OS_TCB *)0;
p_spoke->FirstPtr = p_tcb;
p_spoke->NbrEntries = (OS_OBJ_QTY)1u;
} else {
p_tcb1 = p_spoke->FirstPtr; /* Point to current first TCB in the list */
while (p_tcb1 != (OS_TCB *)0) {
p_tcb1->TickRemain = p_tcb1->TickCtrMatch /* Compute time remaining of current TCB in list */
- OSTickCtr;
if (p_tcb->TickRemain > p_tcb1->TickRemain) { /* Do we need to insert AFTER current TCB in list? */
if (p_tcb1->TickNextPtr != (OS_TCB *)0) { /* Yes, are we pointing at the last TCB in the list? */
p_tcb1 = p_tcb1->TickNextPtr; /* No, Point to next TCB in the list */
} else {
p_tcb->TickNextPtr = (OS_TCB *)0;
p_tcb->TickPrevPtr = p_tcb1;
p_tcb1->TickNextPtr = p_tcb; /* Yes, TCB to add is now new last entry in the list */
p_tcb1 = (OS_TCB *)0; /* Break loop */
}
} else { /* Insert before the current TCB */
if (p_tcb1->TickPrevPtr == (OS_TCB *)0) { /* Are we inserting before the first TCB? */
p_tcb->TickPrevPtr = (OS_TCB *)0;
p_tcb->TickNextPtr = p_tcb1;
p_tcb1->TickPrevPtr = p_tcb;
p_spoke->FirstPtr = p_tcb;
} else { /* Insert in between 2 TCBs already in the list */
p_tcb0 = p_tcb1->TickPrevPtr;
p_tcb->TickPrevPtr = p_tcb0;
p_tcb->TickNextPtr = p_tcb1;
p_tcb0->TickNextPtr = p_tcb;
p_tcb1->TickPrevPtr = p_tcb;
}
p_tcb1 = (OS_TCB *)0; /* Break loop */
}
}
p_spoke->NbrEntries++;
}
if (p_spoke->NbrEntriesMax < p_spoke->NbrEntries) { /* Keep track of maximum # of entries in each spoke */
p_spoke->NbrEntriesMax = p_spoke->NbrEntries;
}
p_tcb->TickSpokePtr = p_spoke; /* Link back to tick spoke */
*p_err = OS_ERR_NONE;
}
OS_TickListInsert
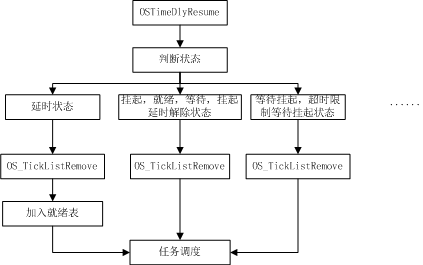
4.取消任务延时
#if OS_CFG_TIME_DLY_RESUME_EN > 0u
void OSTimeDlyResume (OS_TCB *p_tcb,
OS_ERR *p_err)
{
CPU_SR_ALLOC(); #ifdef OS_SAFETY_CRITICAL
if (p_err == (OS_ERR *)0) {
OS_SAFETY_CRITICAL_EXCEPTION();
return;
}
#endif #if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u
if (OSIntNestingCtr > (OS_NESTING_CTR)0u) { /* Not allowed to call from an ISR */
*p_err = OS_ERR_TIME_DLY_RESUME_ISR;
return;
}
#endif #if OS_CFG_ARG_CHK_EN > 0u
if (p_tcb == (OS_TCB *)0) { /* Not possible for the running task to be delayed! */
*p_err = OS_ERR_TASK_NOT_DLY;
return;
}
#endif CPU_CRITICAL_ENTER();
if (p_tcb == OSTCBCurPtr) { /* Not possible for the running task to be delayed! */
*p_err = OS_ERR_TASK_NOT_DLY;
CPU_CRITICAL_EXIT();
return;
} switch (p_tcb->TaskState) {
case OS_TASK_STATE_RDY: /* Cannot Abort delay if task is ready */
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; case OS_TASK_STATE_DLY:
OS_CRITICAL_ENTER_CPU_EXIT();
p_tcb->TaskState = OS_TASK_STATE_RDY;
OS_TickListRemove(p_tcb); /* Remove task from tick list */
OS_RdyListInsert(p_tcb); /* Add to ready list */
OS_CRITICAL_EXIT_NO_SCHED();
*p_err = OS_ERR_NONE;
break; case OS_TASK_STATE_PEND:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; case OS_TASK_STATE_PEND_TIMEOUT:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; case OS_TASK_STATE_SUSPENDED:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; case OS_TASK_STATE_DLY_SUSPENDED:
OS_CRITICAL_ENTER_CPU_EXIT();
p_tcb->TaskState = OS_TASK_STATE_SUSPENDED;
OS_TickListRemove(p_tcb); /* Remove task from tick list */
OS_CRITICAL_EXIT_NO_SCHED();
*p_err = OS_ERR_TASK_SUSPENDED;
break; case OS_TASK_STATE_PEND_SUSPENDED:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; case OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_DLY;
break; default:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_STATE_INVALID;
break;
} OSSched();
}
#endif
OSTimeDlyResume
TickList数据结构:

μC/OS在一些变量 的处理上用到了一个技巧:
#ifdef OS_GLOBALS
#define OS_EXT
#else
#define OS_EXT extern
#endif
#if OS_CFG_APP_HOOKS_EN > 0u
OS_EXT OS_APP_HOOK_TCB OS_AppTaskCreateHookPtr; /* Application hooks */
OS_EXT OS_APP_HOOK_TCB OS_AppTaskDelHookPtr;
OS_EXT OS_APP_HOOK_TCB OS_AppTaskReturnHookPtr; OS_EXT OS_APP_HOOK_VOID OS_AppIdleTaskHookPtr;
OS_EXT OS_APP_HOOK_VOID OS_AppStatTaskHookPtr;
OS_EXT OS_APP_HOOK_VOID OS_AppTaskSwHookPtr;
OS_EXT OS_APP_HOOK_VOID OS_AppTimeTickHookPtr;
#endif /* IDLE TASK -------------------------------- */
OS_EXT OS_IDLE_CTR OSIdleTaskCtr;
OS_EXT OS_TCB OSIdleTaskTCB; /* MISCELLANEOUS ---------------------------- */
OS_EXT OS_NESTING_CTR OSIntNestingCtr; /* Interrupt nesting level */
#ifdef CPU_CFG_INT_DIS_MEAS_EN
OS_EXT CPU_TS OSIntDisTimeMax; /* Overall interrupt disable time */
#endif OS_EXT OS_STATE OSRunning; /* Flag indicating that kernel is running */ /* ISR HANDLER TASK ------------------------- */
#if OS_CFG_ISR_POST_DEFERRED_EN > 0u
OS_EXT OS_INT_Q *OSIntQInPtr;
OS_EXT OS_INT_Q *OSIntQOutPtr;
OS_EXT OS_OBJ_QTY OSIntQNbrEntries;
OS_EXT OS_OBJ_QTY OSIntQNbrEntriesMax;
OS_EXT OS_OBJ_QTY OSIntQOvfCtr;
OS_EXT OS_TCB OSIntQTaskTCB;
OS_EXT CPU_TS OSIntQTaskTimeMax;
#endif
示例代码
对于声明了OS_GLOBALS的文件内后面的变量就是定义,否则就是声明;
μC/OS-III---I笔记3---时间管理的更多相关文章
- 《Linux内核设计与实现》读书笔记(十一)- 定时器和时间管理【转】
转自:http://www.cnblogs.com/wang_yb/archive/2013/05/10/3070373.html 系统中有很多与时间相关的程序(比如定期执行的任务,某一时间执行的任务 ...
- (笔记)Linux内核学习(八)之定时器和时间管理
一 内核中的时间观念 内核在硬件的帮助下计算和管理时间.硬件为内核提供一个系统定时器用以计算流逝的时间.系 统定时器以某种频率自行触发,产生时钟中断,进入内核时钟中断处理程序中进行处理. 墙上时间和系 ...
- Linux内核入门到放弃-时间管理-《深入Linux内核架构》笔记
低分辨率定时器的实现 定时器激活与进程统计 IA-32将timer_interrupt注册为中断处理程序,而AMD64使用的是timer_event_interrupt.这两个函数都通过调用所谓的全局 ...
- Linux内核设计与实现 总结笔记(第十一章)定时器和时间管理
时间管理在内核中占用非常重要的地位,内核中有大量的函数都需要基于时间驱动的,内核对相对时间和绝对时间都非常需要. 一.内核中的时间概念 内核必须在硬件的帮助下才能计算和管理时间,系统定时器以某种频率自 ...
- Mongodb Manual阅读笔记:CH4 管理
4 管理 Mongodb Manual阅读笔记:CH2 Mongodb CRUD 操作Mongodb Manual阅读笔记:CH3 数据模型(Data Models)Mongodb Manual阅读笔 ...
- 基于μC/OS—III的CC1120驱动程序设计
基于μC/OS—III的CC1120驱动程序设计 时间:2014-01-21 来源:电子设计工程 作者:张绍游,张贻雄,石江宏 关键字:CC1120 嵌入式操作系统 STM32F103ZE ...
- uC/OS-III 时钟节拍,时间管理,时间片调度
uC/OS-III 时钟节拍,时间管理,时间片调度 时钟节拍 时钟节拍可谓是 uC/OS 操作系统的心脏,它若不跳动,整个系统都将会瘫痪. 时钟节拍就是操作系统的时基,操作系统要实现时间上的管理, ...
- PMP备考_第六章_项目时间管理
项目时间管理 前言 项目时间管理是项目管理中最难的一个环节,与个人时间管理类似,团体的效率如果管理不当,是低于个人效率的,为了管理好时间,从预估,执行到反馈均需要严格的分析和处理.如果制定的计划是无法 ...
- 【uTenux实验】时间管理(系统时间/周期性处理/警报处理)
1.系统时间管理 系统时间管理函数用来对系统时间进行操作,是OS的一个基础性的东西.个人认为,设置系统时间和获取系统时间对OS来说基本是可有可无的. uTenux提供了三个系统时间相关API.分别用于 ...
- 【CC评网】2013.第42周 话说时间管理
时间管理 工作几年之后,大家都会有意识的培养时间管理的概念:但如何真正做到位,并持续坚持,并不是一件容易的事: 虽然关注时间管理已有几年,但目前我对于时间的利用并不高效: 理论上的东西就是那些,但真正 ...
随机推荐
- JavaScript学习总结(基础知识)
js代码引入 方式1: <script> alert('欢迎来到德玛西亚!') </script> 方式2:外部文件引入 src属性值为js文件路径 <script sr ...
- std::async的使用总结
C++98标准中并没有线程库的存在,直到C++11中才终于提供了多线程的标准库,提供了管理线程.保护共享数据.线程间同步操作.原子操作等类.多线程库对应的头文件是#include <thread ...
- uni-app开发经验分享八: 实现微信APP支付的全过程详解
背景 最近项目使用uni-app实现微信支付,把过程简单记录下,帮助那些刚刚基础uni-app,苦于文档的同学们.整体来说实现过程和非uni-app的实现方式没有太大不同,难点就在于uni-app对于 ...
- Mybatis总结(一)
Mybatis总结(一) 一.Mybatis启动流程(代码层面) 关于config.xml <?xml version="1.0" encoding="UTF-8& ...
- 并发编程:Actors 模型和 CSP 模型
https://mp.weixin.qq.com/s/emB99CtEVXS4p6tRjJ2xww 并发编程:Actors 模型和 CSP 模型 ImportNew 2017-04-27
- 服务端渲染 数据驱动 不是渲染后的网页,而是一个由html和Javascript组成的app ssr 隐藏接口服务器
小结: 1. 服务端渲染主要的工作是把组件渲染为服务器端的 HTML 字符串,将它们直接发送到浏览器,最后将静态标记"混合"为客户端上完全交互的应用程序. 服务器给到客户端的已经是 ...
- windows IOCP 实践
关于 windows IOCP 有人说 windows IOCP 是 windows 上最好的东西. IOCP 是真正的异步 IO,意味着每次发起一个 IO 请求,该调用本身则立即返回, 而包括 IO ...
- CF976B
这是一道考验思维找规律的题,很有可做性. 正文 题意 一个 n * m 的矩阵,从左上角(1 , 1) 开始,先向下走直到最下方,再向右走到最右,再向上走一个,再走到最左......一直走到(1 , ...
- C语言--指针数组大小
#include <stdio.h> #include <string.h> int main(void) { char *str[3]={ "Hello,thisi ...
- mysql修改最大连接数
root@localhost ~]# nano /etc/my.cnf编辑my.cnf在[mysqld]中加入:set-variable=max_connections=1000 更改 MySQL 在 ...