CoordConv:给你的卷积加上坐标
摘要:本文主要对CoordConv的理论进行了介绍,对其进行了复现,并展示了其在网络结构中的用法。
本文分享自华为云社区《CoordConv:给你的卷积加上坐标》,作者: 李长安。
一、理论介绍
1.1 CoordConv理论详解
这是一篇考古的论文复现项目,在2018年作者提出这个CoordConv模块的时候有很多文章对其进行批评,认为这个不值得发布一篇论文,但是现在重新看一下这个idea,同时再对比一下目前Transformer中提出的位置编码(Position Encoding),你就会感概历史是个圈,在角点卷积中,为卷积添加两个坐标编码实际上与Transformer中提出的位置编码是同样的道理。
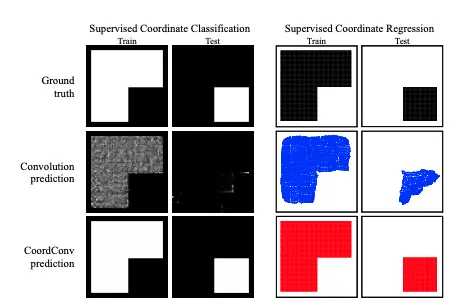
众所周知,深度学习里的卷积运算是具有平移等变性的,这样可以在图像的不同位置共享统一的卷积核参数,但是这样卷积学习过程中是不能感知当前特征在图像中的坐标的,论文中的实验证明如下图所示。通过该实验,作者证明了传统卷积在卷积核进行局部运算时,仅仅能感受到局部信息,并且是无法感受到位置信息的。CoordConv就是通过在卷积的输入特征图中新增对应的通道来表征特征图像素点的坐标,让卷积学习过程中能够一定程度感知坐标来提升检测精度。
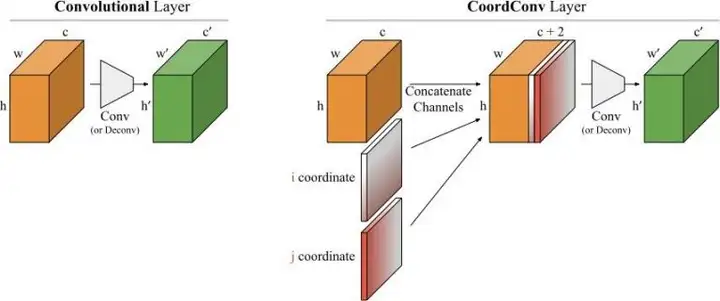
传统卷积无法将空间表示转换成笛卡尔空间中的坐标和one-hot像素空间中的坐标。卷积是等变的,也就是说当每个过滤器应用到输入上时,它不知道每个过滤器在哪。我们可以帮助卷积,让它知道过滤器的位置。这一过程需要在输入上添加两个通道实现,一个在i坐标,另一个在j坐标。通过上面的添加坐标的操作,我们可以的出一种新的卷积结构–CoordConv,其结构如下图所示:
二、代码实战
本部分根据CoordConv论文并参考飞桨的官方实现完成CoordConv的复现。
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
from paddle import ParamAttr
from paddle.regularizer import L2Decay
from paddle.nn import AvgPool2D, Conv2D
2.1 CoordConv类代码实现
首先继承nn.Layer基类,其次使用paddle.arange定义gx``gy两个坐标,并且停止它们的梯度反传gx.stop_gradient = True,最后将它们concat到一起送入卷积即可。
class CoordConv(nn.Layer):
def __init__(self, in_channels, out_channels, kernel_size, stride, padding):
super(CoordConv, self).__init__()
self.conv = Conv2D(
in_channels + 2, out_channels , kernel_size , stride , padding)
def forward(self, x):
b = x.shape[0]
h = x.shape[2]
w = x.shape[3]
gx = paddle.arange(w, dtype='float32') / (w - 1.) * 2.0 - 1.
gx = gx.reshape([1, 1, 1, w]).expand([b, 1, h, w])
gx.stop_gradient = True
gy = paddle.arange(h, dtype='float32') / (h - 1.) * 2.0 - 1.
gy = gy.reshape([1, 1, h, 1]).expand([b, 1, h, w])
gy.stop_gradient = True
y = paddle.concat([x, gx, gy], axis=1)
y = self.conv(y)
return y
class dcn2(paddle.nn.Layer):
def __init__(self, num_classes=1):
super(dcn2, self).__init__()
self.conv1 = paddle.nn.Conv2D(in_channels=3, out_channels=32, kernel_size=(3, 3), stride=1, padding = 1)
self.conv2 = paddle.nn.Conv2D(in_channels=32, out_channels=64, kernel_size=(3,3), stride=2, padding = 0)
self.conv3 = paddle.nn.Conv2D(in_channels=64, out_channels=64, kernel_size=(3,3), stride=2, padding = 0)
self.offsets = paddle.nn.Conv2D(64, 18, kernel_size=3, stride=2, padding=1)
self.mask = paddle.nn.Conv2D(64, 9, kernel_size=3, stride=2, padding=1)
self.conv4 = CoordConv(64, 64, (3,3), 2, 1)
self.flatten = paddle.nn.Flatten()
self.linear1 = paddle.nn.Linear(in_features=1024, out_features=64)
self.linear2 = paddle.nn.Linear(in_features=64, out_features=num_classes)
def forward(self, x):
x = self.conv1(x)
x = F.relu(x)
x = self.conv2(x)
x = F.relu(x)
x = self.conv3(x)
x = F.relu(x)
x = self.conv4(x)
x = F.relu(x)
x = self.flatten(x)
x = self.linear1(x)
x = F.relu(x)
x = self.linear2(x)
return x
cnn3 = dcn2()
model3 = paddle.Model(cnn3)
model3.summary((64, 3, 32, 32))
---------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
===========================================================================
Conv2D-26 [[64, 3, 32, 32]] [64, 32, 32, 32] 896
Conv2D-27 [[64, 32, 32, 32]] [64, 64, 15, 15] 18,496
Conv2D-28 [[64, 64, 15, 15]] [64, 64, 7, 7] 36,928
Conv2D-31 [[64, 66, 7, 7]] [64, 64, 4, 4] 38,080
CoordConv-4 [[64, 64, 7, 7]] [64, 64, 4, 4] 0
Flatten-1 [[64, 64, 4, 4]] [64, 1024] 0
Linear-1 [[64, 1024]] [64, 64] 65,600
Linear-2 [[64, 64]] [64, 1] 65
===========================================================================
Total params: 160,065
Trainable params: 160,065
Non-trainable params: 0
---------------------------------------------------------------------------
Input size (MB): 0.75
Forward/backward pass size (MB): 26.09
Params size (MB): 0.61
Estimated Total Size (MB): 27.45
---------------------------------------------------------------------------
{'total_params': 160065, 'trainable_params': 160065}
class MyNet(paddle.nn.Layer):
def __init__(self, num_classes=1):
super(MyNet, self).__init__()
self.conv1 = paddle.nn.Conv2D(in_channels=3, out_channels=32, kernel_size=(3, 3), stride=1, padding = 1)
self.conv2 = paddle.nn.Conv2D(in_channels=32, out_channels=64, kernel_size=(3,3), stride=2, padding = 0)
self.conv3 = paddle.nn.Conv2D(in_channels=64, out_channels=64, kernel_size=(3,3), stride=2, padding = 0)
self.conv4 = paddle.nn.Conv2D(in_channels=64, out_channels=64, kernel_size=(3,3), stride=2, padding = 1)
self.flatten = paddle.nn.Flatten()
self.linear1 = paddle.nn.Linear(in_features=1024, out_features=64)
self.linear2 = paddle.nn.Linear(in_features=64, out_features=num_classes)
def forward(self, x):
x = self.conv1(x)
x = F.relu(x)
x = self.conv2(x)
x = F.relu(x)
x = self.conv3(x)
x = F.relu(x)
x = self.conv4(x)
x = F.relu(x)
x = self.flatten(x)
x = self.linear1(x)
x = F.relu(x)
x = self.linear2(x)
return x
# 可视化模型
cnn1 = MyNet()
model1 = paddle.Model(cnn1)
model1.summary((64, 3, 32, 32))
---------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
===========================================================================
Conv2D-1 [[64, 3, 32, 32]] [64, 32, 32, 32] 896
Conv2D-2 [[64, 32, 32, 32]] [64, 64, 15, 15] 18,496
Conv2D-3 [[64, 64, 15, 15]] [64, 64, 7, 7] 36,928
Conv2D-4 [[64, 64, 7, 7]] [64, 64, 4, 4] 36,928
Flatten-1 [[64, 64, 4, 4]] [64, 1024] 0
Linear-1 [[64, 1024]] [64, 64] 65,600
Linear-2 [[64, 64]] [64, 1] 65
===========================================================================
Total params: 158,913
Trainable params: 158,913
Non-trainable params: 0
---------------------------------------------------------------------------
Input size (MB): 0.75
Forward/backward pass size (MB): 25.59
Params size (MB): 0.61
Estimated Total Size (MB): 26.95
---------------------------------------------------------------------------
{'total_params': 158913, 'trainable_params': 158913}
总结
相信通过之前的教程,相信大家已经能够熟练掌握了迅速开启训练的方法。所以,之后的教程我都会关注于具体的代码实现以及相关的理论介绍。如无必要,不再进行对比实验。本次教程主要对CoordConv的理论进行了介绍,对其进行了复现,并展示了其在网络结构中的用法。大家可以根据的实际需要,将其移植到自己的网络中。
一些需要注意的点
- CoordConv的位置在网络中应该尽量靠前
- 最好的应用方向是姿态估计等对位置高度敏感的CV任务
CoordConv:给你的卷积加上坐标的更多相关文章
- An intriguing failing of convolutional neural networks and the CoordConv solution
An intriguing failing of convolutional neural networks and the CoordConv solution NeurIPS 2018 2019- ...
- mnist卷积网络实现
加载MNIST数据 from tensorflow.examples.tutorials.mnist import input_data mnist = input_data.read_data_se ...
- 【NOIP2005】过河
感觉这题好玄--最后看了chty的代码才过,我现在这样必须看题解才能A题怎么办嘛qaq 原题: 在河上有一座独木桥,一只青蛙想沿着独木桥从河的一侧跳到另一侧.在桥上有一些石子,青蛙很讨厌踩在这些石子上 ...
- gnuplot 学习笔记
1 如何运行 gnuplot是一个命令行输入的工具,把命令行写入一个文本file1 file2.使用下列方式运行. gnuplot {option} file1 file2 2 产生一个图标,不管数据 ...
- 【SDOI2008】解题汇总
好叭我真的是闲的了... /---------------------------------------------/ BZOJ-2037 [SDOI2008]Sue的小球 DP+相关费用提前计算 ...
- BZOJ-2190 仪仗队 数论+欧拉函数(线性筛)
今天zky学长讲数论,上午水,舒爽的不行..后来下午直接while(true){懵逼:}死循全程懵逼....(可怕)Thinking Bear. 2190: [SDOI2008]仪仗队 Time Li ...
- PAT-乙级-1044. 火星数字(20)
1044. 火星数字(20) 时间限制 400 ms 内存限制 65536 kB 代码长度限制 8000 B 判题程序 Standard 作者 CHEN, Yue 火星人是以13进制计数的: 地球人的 ...
- GIS:揭开你神秘的面纱
转自:http://www.cnblogs.com/gisangela/archive/2013/02/20/2918884.html#!comments GIS从出现到为人所知,只不过经历了短短的几 ...
- AHK(1)之运行程序或打开文档
小鸟学AHK(1)之运行程序或打开文档 AHK就是AutoHotKey,是一款免费的.Windows平台下开放源代码的热键脚本语言. 亲爱的朋友,叫我怎么向你推荐它呢! COOL,对,就是酷,那么 ...
- openlayers应用“四”:百度地图纠偏续
续前一篇,上一篇提到百度地图纠偏的基本思路,经过经过一天的努力,实现了百度地图坐标偏移参数的提取,步骤以及实现效果如下: 1.数据来源:四川省的省道矢量数据 2.提取坐标偏移参数的过程如下: A.将四 ...
随机推荐
- linux资源查看与监控命令
- iOS 为 textView 添加 placeholder
OC : //自定义一个 placeholder 样式的 label UILabel *placeholder = [UILabel new]; placeholder.text = @"请 ...
- C++ 函数参数与按值传递
C++ 函数参数与按值传递 C++ 通常安值传递参数,这意味着将数值参数传递给函数,而后者将其赋给一个新的变量. double volume = cube(side); 其中,side 是一个变量. ...
- C语言初级阶段7——指针3
C语言初级阶段7--指针3 指针数组:描述的是一个数组,存储的是指针 #include<stdio.h> void fun(int(*arr)[2]) { for (int i = 0; ...
- 【SQL】数据库日志文件过大 4条命令删除日志
USE DATATABLE GO ALTER DATABASE DATATABLE SET RECOVERY SIMPLE DBCC SHRINKFILE (DATATABLE_Log, 1) ALT ...
- 华为服务器修改ibmc账号密码、配置raid5、安装系统
修改ibmc账号密码 转载自:https://www.cnblogs.com/mtactor/p/2288V5.html 昵称: mtactor 方法一:采用网线直连管理口 1.使用网线直接连接服务 ...
- 【技术指北】通过SMB协议在iOS和Windows之间传输文件
windows操作 新建文件夹 设置文件夹的属性,选择共享 设置高级共享,权限选择完全控制 选择共享,选择Everyone cmd - ipcofig,获取ipv4地址 iOS操作 打开文件管理器 选 ...
- SQL SERVER 2014 双机热备操作流程-数据库双向同步 (第二篇:订阅)
1.登录从服务器数据库,从数据库左侧菜单栏找到->复制->本地订阅->右击新建订阅->选择查找SQL Server 发布服务器,数据库服务器名称要是主服务器计算机名称,输入登录 ...
- C#实现控制台打印年历
C#实现控制台打印年历 1 using System; 2 using System.Collections.Generic; 3 using System.Linq; 4 using System. ...
- 116、商城业务---分布式事务---seata的AT模式存在的问题&&最终一致性库存解锁逻辑
seata的AT模式不适合高并发的项目,因为它需要加锁来保证回滚.因此我们的订单服务方法中就尽量不能使用@GlobalTransactional来管理分布式事务. 因此在订单服务中,我们使用下面这种方 ...