JETSON TK1 ~ 基于eclipse下开发ROS
此文档是在PC端开发后移植到TK1,并非在TK1上安装eclipse
官方使用IDE开发的文档: http://wiki.ros.org/IDEs
一:安装eclipse
1、下载eclipse安装包: eclipse
2、下载JDK安装包: JDK
3、按照下面步骤执行
1)把下载的文件移动到opt目录下
sudo mv eclipse-SDK-4.2.-linux-gtk.tar.gz /opt/
2)解压安装包
cd /opt/
sudo tar xzvf eclipse-SDK-4.2.-linux-gtk.tar.gz
3)在/usr/share/applications目录创建桌面快捷方式文件
sudo gedit /usr/share/applications/eclipse.desktop
4)在文件中填入如下内容
[Desktop Entry]
Name=Eclipse
Type=Application
Exec=bash -i -c "/opt/eclipse/eclipse"
Terminal=false
Icon=/opt/eclipse/icon.xpm
Comment=Integrated Development Environment
NoDisplay=false
Categories=Development;IDE
Name[en]=eclipse.desktop
5)将/usr/share/applications/下的 eclipse.desktop拖拽(或使用指令复制)到桌面。
4、安装Jre到eclipse目录
1)解压下载的JDK
sudo tar xzvf jdk-8u131-linux-x64.tar.gz
2)进入解压后目录 jdk1.8.0_131 复制jre到eclipse目录下
cd jdk1.8.0_131/
sudo cp -r jre/ /opt/eclipse
5、双击桌面图标即可启动eclipse
二:生成eclipse项目文件
1、创建工作空间,终端中按下面步骤执行
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
cd catkin_ws
catkin_make
2、创建一个程序包
cd catkin_ws/src
catkin_create_pkg first_pkg std_msgs rospy roscpp
3、到catkin的工作空间,利用catkin_make命令,建立一个eclipse的项目
cd catkin_ws
catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles"
项目的文件声称在目录 catkin_ws/build里
三:在eclipse导入项目
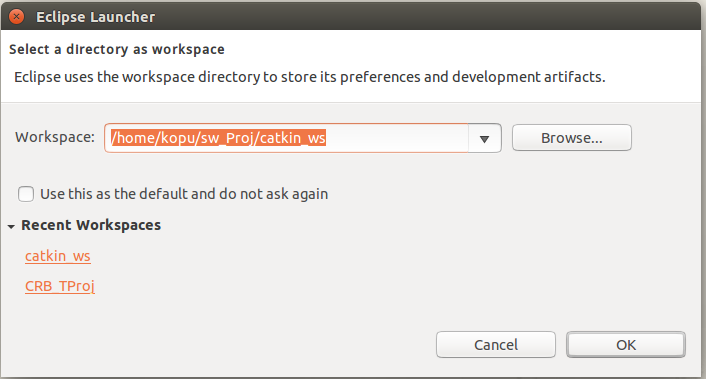
1、启动eclipse,选择catkin_ws作为工作空间
2
2
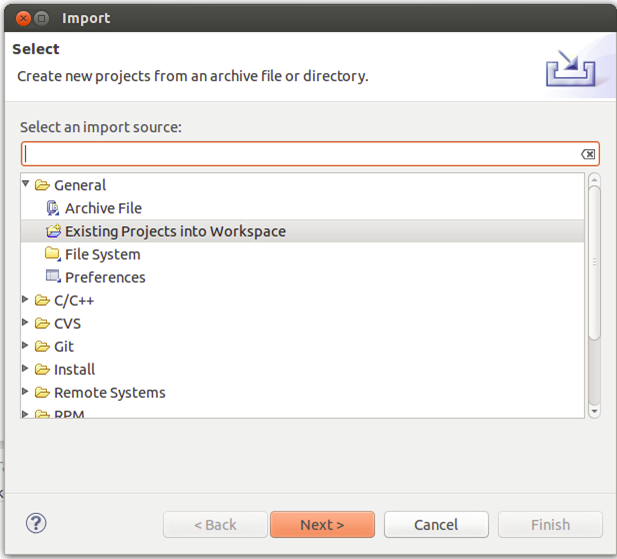
2、选择File --> Import --> General --> Existing Projects into Workspace
3、从文件夹~/catkin_ws/build中导入项目
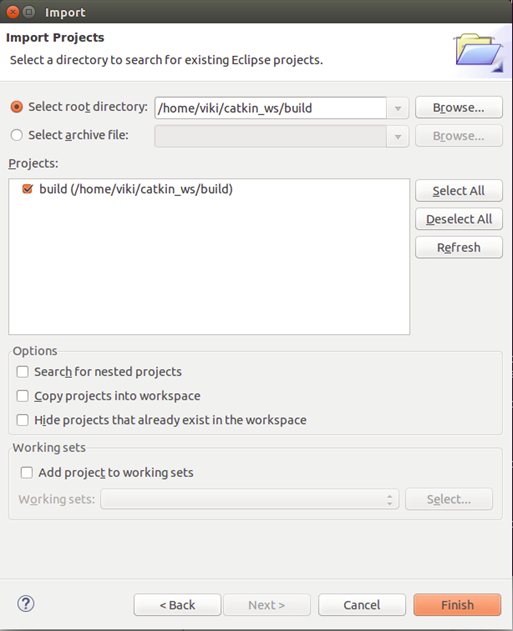
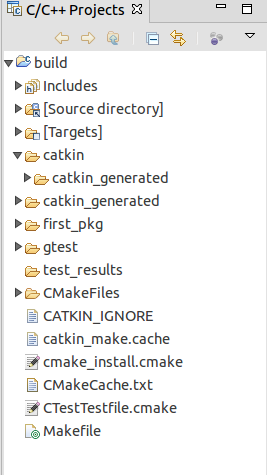
4、点击Finish 后把工程导入eclipse中,文件结构如下图
四:配置eclipse工作环境
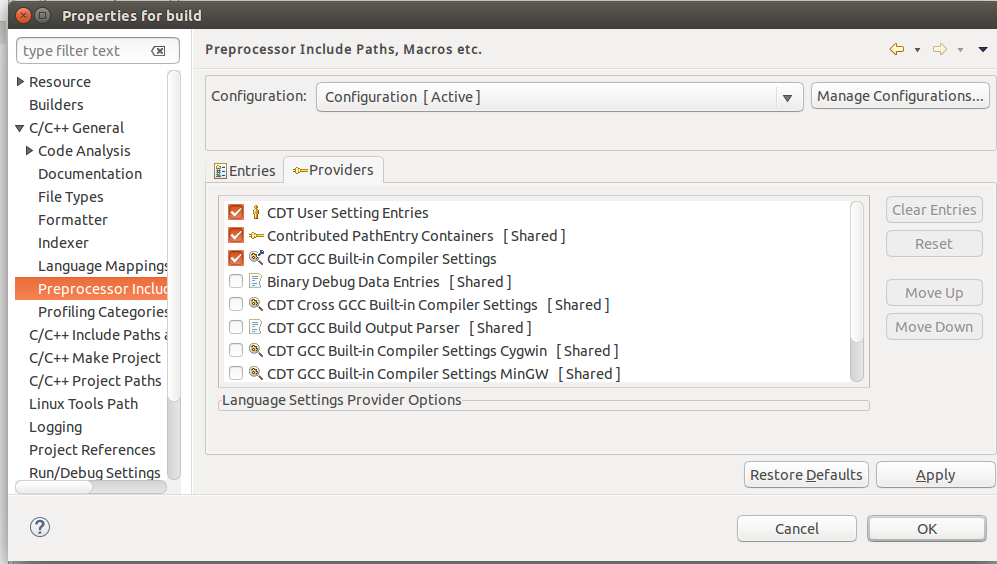
1、添加预编译头文件的路径
–到 Project Properties --> C/C++ General --> Preprocessor Include Paths, Macros, etc. --> Providers 选项卡
–勾选CDT GCC Built-in Compiler Settings [Shared]
2、添加项目文件
项目的源文件在文件夹 "Source directory"中,右键src选择NEW --> Source File, 创建文件 main.cpp

3、添加代码
双击main.cpp 复制如下代码
/*
* main.cpp
*
* Created on: 2017年5月25日
* Author: kopu
*/
#include "ros/ros.h" int main(int argc, char **argv)
{
ros::init(argc, argv, "hello"); ros::NodeHandle nh;
ros::Rate loop_rate(); int count = ;
while (ros::ok()) // Keep spinning loop until user presses Ctrl+C
{
ROS_INFO_STREAM("hello world" << count); ros::spinOnce(); // Allow ROS to process incoming messages
loop_rate.sleep(); // Sleep for the rest of the cycle
count++;
}
return ;
}
4、修改CMakeLists.txt文件
在编译前,需要在main.cpp文件目录下的CMakeLists.txt文件中添加新的编译内容(红色部分)
cmake_minimum_required(VERSION 2.8.)
project(first_pkg) ## Add support for C++, supported in ROS Kinetic and newer
# add_definitions(-std=c++) ## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
) ###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if you package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES first_pkg
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
) ###########
## Build ##
########### ## Specify additional locations of header files
## Your package locations should be listed before other locations
# include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
) ## Declare a cpp executable
add_executable(RosProj src/main.cpp) ## Specify libraries to link a library or executable target against
target_link_libraries(RosProj ${catkin_LIBRARIES}) ## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/first_pkg.cpp
# )
5、编译项目生成可执行文件
快捷键Ctrl-B,编译项目,在/home/kopu/sw_Proj/catkin_ws/devel/lib/first_pkg目录下会生成二进制文件RosProj
6:在eclipse中运行代码
创建新的启动配置,点击 Run --> Run configurations... --> C/C++ Application (double click or click on New)。
选择相应的二进制执行程序 (use the Browse… button)
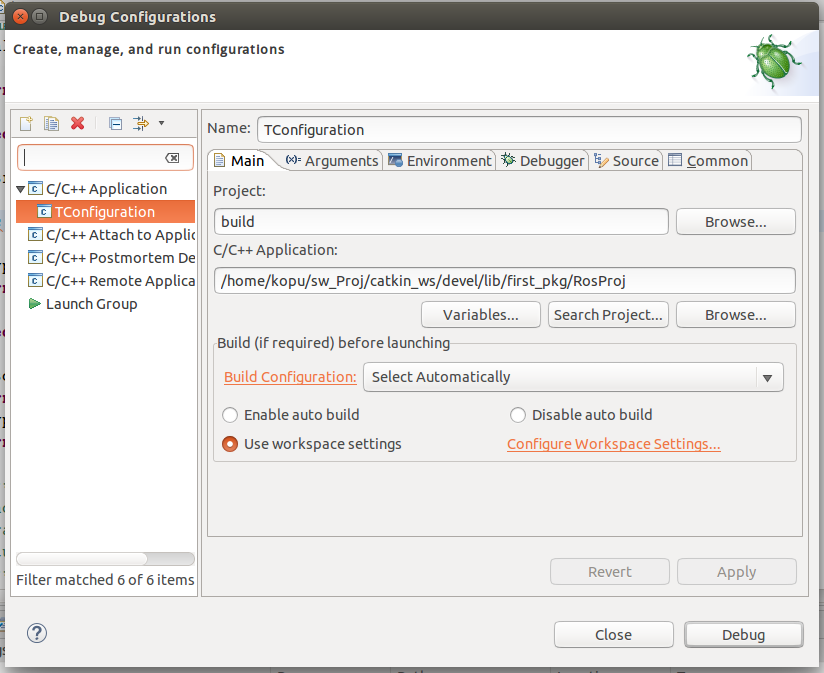
确保roscore已经在终端中运行,点击Run,运行程序。
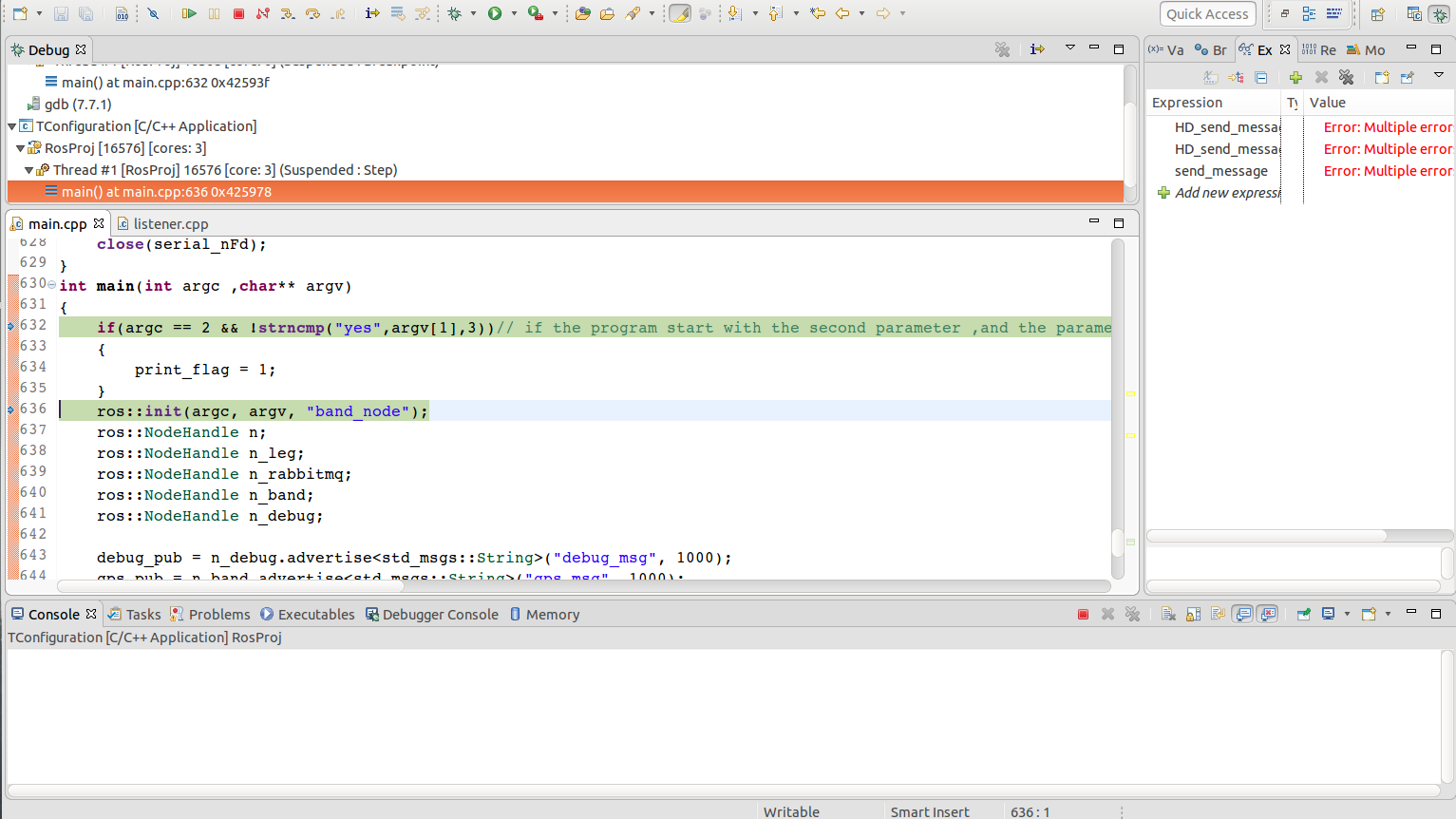
7:在eclipse中调试代码
为了调试,需要将编译器设置为调试模式,终端中,到catkin_ws/build目录执行如下代码:
cmake ../src -DCMAKE_BUILD_TYPE=Debug
重启Eclipse,这样就可以利用Eclipse的调试工具进行调试了,进入调试界面,如下图所示:
JETSON TK1 ~ 基于eclipse下开发ROS的更多相关文章
- 4-1eclipse & 4-2在eclipse下开发Java
ecplise是一款继承的开发工具,可以开发我们的java程序. 下载地址: https://www.eclipse.org/downloads/ 视频中ecplise的版本 安装Ecplise: 默 ...
- eclipse下开发简单的Web Service
service部分 在eclipse下新建一个动态web项目 在项目中新建一个service类 编写SayHello类的代码 package org.sunny.service; //包不要引用错了 ...
- [转]Eclipse下开发Struts奇怪异常:org.apache.struts.taglib.bean.CookieTei
今天早上开始在Eclipse下学习struts,于是按照李兴华老师的<struts入门视频教程>一步一步地充满快乐的学习,等把登陆程序写完,打开浏览器准备运行的时候,奇怪的异常产生了,异常 ...
- 1.3……Eclipse下开发Android相关知识
Android应用目录结构 src -------------------------------------------java原代码存放目录 gen ----------------------- ...
- Windows, Eclipse下开发Heritrix 3.1 (一)环境搭建
国内私募机构九鼎控股打造APP,来就送 20元现金领取地址:http://jdb.jiudingcapital.com/phone.html内部邀请码:C8E245J (不写邀请码,没有现金送)国内私 ...
- 基于Eclipse下的python图像识别菜鸟版(利用pytesseract以及tesseract)
这是我注册博客后写的第一篇博客,希望对有相关问题的朋友有帮助. 在图像识别前,首先我们要做好准备工作. 运行环境:windows7及以上版本 运行所需软件:(有基础的可以跳过这一段)eclipse,p ...
- eclipse下开发winform的插件WindowBuilder
可以开发swt,xwt等c/s应用 WindowBuilder插件可以在MarketPlace下载到,Help->Eclipse MarketPlace 可视化开发界面:
- Eclipse下配置javaweb项目快速部署到tomcat
用惯了VS,再用Eclipse,完全有一种从自动挡到手动挡的感觉啊. 很多同学在Eclipse下开发web项目,每一次修改代码,看效果的时候都有右键项目->Run as -> Run on ...
- Eclipse&Spring开发开发环境配置
下载Eclipse,打开http://www.eclipse.org/downloads/,选择J2EE开发版: 根据操作系统选择32位还是64位. 开发工具:SpringSource Tool Su ...
随机推荐
- matplotlib画图实例:pyplot、pylab模块及作图參数
http://blog.csdn.net/pipisorry/article/details/40005163 Matplotlib.pyplot画图实例 {使用pyplot模块} matplotli ...
- swift 可变參数
func sumof(numbers:Int...)->Int{ var sum = 0; for number in numbers{ sum+=number; } return ...
- MVC组件分析
MVC组件分析 2 System.Web.Mvc V 4.0.0.0 组件分析 2.1 Routing组件(路由选择) Routing的作用就是负责分析Url Action的要求• 必须是一个公有 ...
- zabbix自动发现监控远程端口
zabbix监控远程服务器端口,simple checks是zabbix用来监控无agent的主机 脚本和模板地址: https://github.com/mikeluwen/tcpmonitor
- Atitit.swift 的新特性 以及与java的对比 改进方向attilax 总结
Atitit.swift 的新特性 以及与java的对比 改进方向attilax 总结 1. defer关键字1 2. try!形式存在的“不失败”机制3 3. Guard 4 4. swift的新语 ...
- 使用mescroll实现上拉加载与下拉刷新
现在上拉加载与下拉刷新几乎已经是移动端必备功能之一了,自己实现一个太麻烦,但是好用的插件又非常少.之前看到网上很多人都在用iScroll,于是也尝试用它做了几个DEMO,但或多或少都有一些问题,比如这 ...
- php 如何把中文写入json中 当json文件中还显示的是中文
/*** * 更新版本 */ function showupversionsub(){ #接受post 过来的数据 $app_type=$_POST['aap_type']; if($app_type ...
- CLR内存回收总结,代龄机制
关键字:对象可达图,代龄机制,终止化对象. 代龄机制: 0代满了之后,GC开始回收,剩下的对象升级为1代.(只有不可达的对象才会被回收.) 0代再回收几次之后,1代的对象慢慢增多然后达到阈值,GC同时 ...
- 嵌入式开发之手机arm汇总---科普手机arm
http://www.leiphone.com/news/201406/1102-zzl-arm.html
- 微信小程序的官方文档
虽然不知道微信小程序今后的发展情况,不过做为一名it人员的我还是去了解它. 这是他的文档路径,里面有详细的使用和申请内测号的全部流程,这里就不再过多解释了. 看后那个开发小程序的文档记得分析你感觉微信 ...