详解如何在RVIZ中用Marker显示机器人运动路径
写在前面
最近有道作业题需要将机器人的历史路径显示出来,但是网上很多相关的教程都是搬运了官网的链接,并没有详细的操作流程。。。因此我又花费了很多时间去ros官网上学习marker的用法,学习怎么写publisher和subscriber,最终成功将路径显示了出来。这篇文章是对这个过程的详细的介绍,原理和代码实践部分会分开,因此如果你赶时间只要一个结果的话,把详细的讲解跳过即可。不过我还是推荐看完,毕竟我花了这么多精力来写知其然也要知其所以然。
(我是ROS新手,从作业这一点也应该看出来了XD,有不对的地方欢迎指正)
你应该已经完成了的准备工作
- 已经配置好了ROS工作环境。这一点不用多说,参考ROS wiki。
- 这里我用的是Gazebo仿真环境和RVIZ可视化工具,这两个东西是安装ros时用官网上那个最全的安装包里自带(这里展示的是kinetic版本的安装命令,其他的版本到上面的链接里面找):
$ sudo apt install ros-kinetic-desktop-full
已经跟着ROS wiki建立了catkin工作区,我这里的工作区就是wiki上的
~/catkin_ws,如果你的不是在用户根目录下记得在后面执行命令的时候改掉。工作区目录下的
src目录在系统的ROS_PACKAGE_PATH环境变量中,不在的话可以这样设置:
$ export ROS_PACKAGE_PATH=${ROS_PACKAEG_PATH}:${HOME}/catkin_ws/src
写路径显示的执行结点
首先要创建一个package,名为show_path。如果用python倒是不需要,可我这用的是C++:
$ cd ~/catkin_ws/src
$ catkin_create_pkg show_path std_msgs roscpp visualization_msgs tf
源代码
将下面的代码放进一个cpp文件,放在刚建好的package下的src目录下。即~/catkin_ws/src/show_path/src/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, "showpath");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10);
ros::Rate r(10);
tf::TransformListener listener;
while (!ros::ok()){
r.sleep();
}
visualization_msgs::Marker points, line_strip;
points.header.frame_id = line_strip.header.frame_id = "/map";
points.header.stamp = line_strip.header.stamp = ros::Time::now();
points.ns = line_strip.ns = "showpath";
points.action = line_strip.action = visualization_msgs::Marker::ADD;
points.pose.orientation.w = line_strip.pose.orientation.w = 1.0;
points.id = 0;
line_strip.id = 1;
points.type = visualization_msgs::Marker::POINTS;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
line_strip.scale.x = 0.05;
line_strip.color.b = 1.0;
line_strip.color.a = 1.0;
float x(0), y(0);
int cnt(0);
while (ros::ok())
{
tf::StampedTransform transform;
try{
listener.lookupTransform("/map", "/base_footprint",
ros::Time(0), transform);
}
catch (tf::TransformException ex){
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
}
x = transform.getOrigin().x();
y = transform.getOrigin().y();
geometry_msgs::Point p;
p.x = x;
p.y = y;
p.z = 0.1;
if (cnt > 1) {line_strip.points.push_back(p);}
else {cnt++;}
marker_pub.publish(line_strip);
r.sleep();
}
}
源代码详解
下面我分块讲解以下本例中的源代码,方便大家根据需要更改。
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <visualization_msgs/Marker.h>
引入必要的头文件。ros.h是C++的api;transform_listener.h的引入是为了获取机器人的坐标;Marker.h则是ros的message,本方法的主角。关于Marker的详细介绍参照ROS的Marker参考页。
ros::init(argc, argv, "showpath");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10);
ros::Rate r(10);
tf::TransformListener listener;
初始化结点,命名为“showpath”,发布话题为“visualization_marker”,频率为10。同时声明tf坐标听者对象listener。
while (!ros::ok()){
r.sleep();
}
等待ros连接
visualization_msgs::Marker points, line_strip;
points.header.frame_id = line_strip.header.frame_id = "/map";
points.header.stamp = line_strip.header.stamp = ros::Time::now();
points.ns = line_strip.ns = "showpath";
points.action = line_strip.action = visualization_msgs::Marker::ADD;
points.pose.orientation.w = line_strip.pose.orientation.w = 1.0;
定义了两个对象并且将它们初始化:
points是点,并不显示,但是是组成线的基本单元。line_strip线,用于标示历史路径。
points.id = 0;
line_strip.id = 1;
前面points和line_strip共用同一个namespace即showpath,这里把两者的id作出区别以免发生冲突。
points.type = visualization_msgs::Marker::POINTS;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
设置两种Marker的种类。
line_strip.scale.x = 0.05;
line_strip.color.b = 1.0;
line_strip.color.a = 1.0;
设置轨迹的宽度(scale)和颜色(color)。这里设置宽度为0.05, 颜色为蓝色不透明。
tf::StampedTransform transform;
try{
listener.lookupTransform("/map", "/base_footprint",
ros::Time(0), transform);
}
catch (tf::TransformException ex){
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
}
在连接的时间内,持续获取/map到/base_footprint的坐标,也就是机器人在地图上的坐标,返回到listener对象中。
x = transform.getOrigin().x();
y = transform.getOrigin().y();
geometry_msgs::Point p;
p.x = x;
p.y = y;
p.z = 0.1;
取出机器人在地图上的坐标,并且记录在点p内。
if (cnt > 1) {line_strip.points.push_back(p);}
else {cnt++;}
将点p加入line_strip内的点队列内。排除掉第一个点,第一个点有可能会初始化到原点,使路径中出现一段不该有的直线。当然,只是我个人遇到的问题,不敢说一定会这这样。
marker_pub.publish(line_strip);
r.sleep();
发布话题以及必要的sleep
后续工作
在刚建立的package里的CMakeList.txt中加入以下两行:
add_executable(showpath src/showpath.cpp)
target_link_libraries(showpath ${catkin_LIBRARIES})
之后就可以开始愉快地make啦。
$ cd ~/catkin_ws
$ catkin_make
之后
$ source devel/setup.bash
显示路径
首先还是将turtlebot放进我们的仿真环境。这里就用默认的做个范例:
$ roslaunch turtlebot_gazebo turtlebot_world.launch
之后,启动自动导航,调出地图。
$ roslaunch turtlebot_gazebo amcl_demo.launch
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
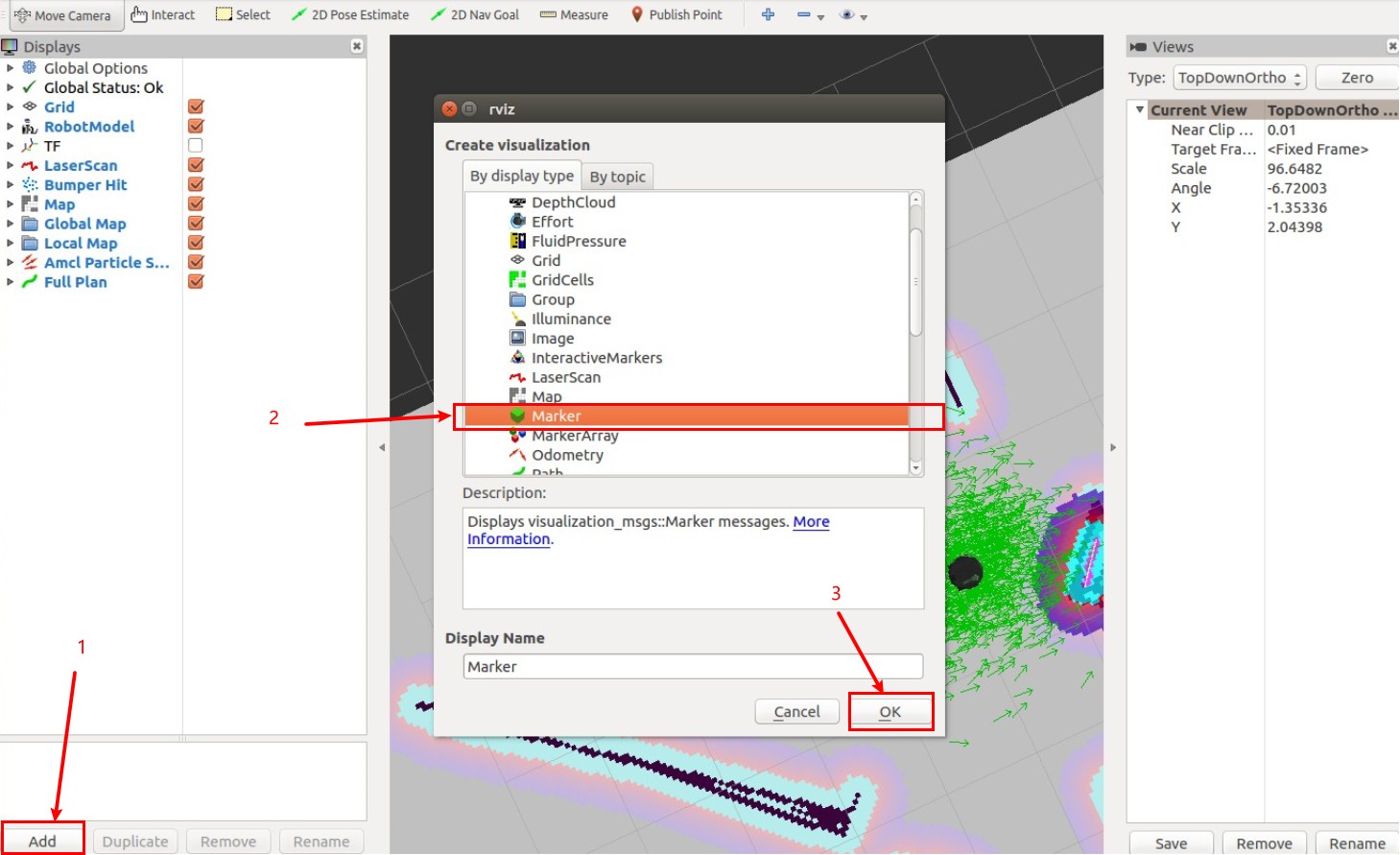
在rviz里订阅Marker话题:点击左下角的“add”,在弹出的对话框中选择Marker。
获取坐标需要一定的历史信息,所以可以先让机器人运动一下,再启动showpath节点:
$ rosrun show_path showpath
可能会有这样的报错信息,忽略就好,不影响最终效果(如果有知道为什么请赐教,在此谢过)

给机器人定个目标位姿,导航过去就可以看到路径用蓝色线条标出来啦。
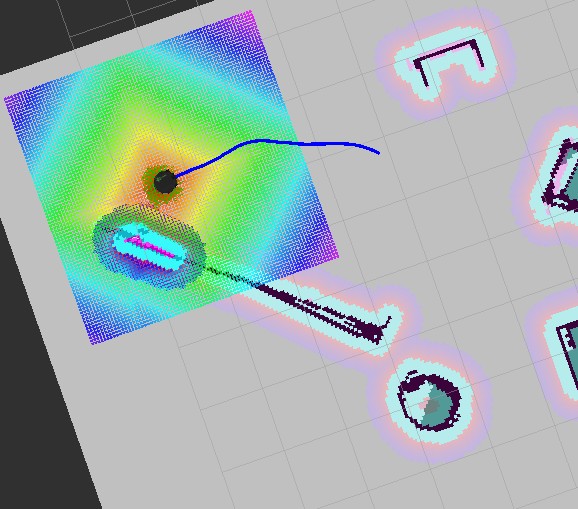
PS:虽然这里是用导航来移动机器人的,但是我们标记历史路径的程序并没有用到导航信息。事实上这里用别的方式去移动机器人,也是可以画出路径的,只是,没有地图的话,这个路径的意义就不是那么明显了。
参考链接
详解如何在RVIZ中用Marker显示机器人运动路径的更多相关文章
- 详解如何在CentOS7中使用Nginx和PHP7-FPM安装Nextcloud
转载地址:https://www.jb51.net/article/109382.htm 这篇文章主要介绍了详解如何在CentOS7中使用Nginx和PHP7-FPM安装Nextcloud,会通过 N ...
- 详解如何在Laravel中增加自定义全局函数
http://www.php.cn/php-weizijiaocheng-383928.html 如何在Laravel中增加自定义全局函数?在我们的应用里经常会有一些全局都可能会用的函数,我们应该怎么 ...
- Delphi中ShellExecute使用详解(详细解释10种显示状态)
有三个API函数可以运行可执行文件WinExec.ShellExecute和CreateProcess.1.CreateProcess因为使用复杂,比较少用.2.WinExec主要运行EXE文件.如: ...
- 详解如何在linuxmint上用源码包安装nodejs
第一步:安装依赖包 因为Linuxmint 和 Ubuntu 同属 Debian系的Linux,而且Linuxmint是建立在Ubuntu的基础上的,所以Ubuntu下的命令和包,Linuxmin ...
- 详解如何在 Linux 中安装最新的 Python 3.6 版本
# 下载源码包安装,先装wget,或curl. yum install wget # 再安装解压缩和编译环境: yum install zlib-devel bzip2-devel openssl-d ...
- 详解如何在vue项目中引入饿了么elementUI组件
在开发的过程之中,我们也经常会使用到很多组件库:vue 常用ui组件库:https://blog.csdn.net/qq_36538012/article/details/82146649 今天具体说 ...
- 详解如何在 Linux 启动时自动执行命令或脚本
我一直很好奇,在启动 Linux 系统并登录的过程中到底发生了什么事情.按下开机键或启动一个虚拟机,你就启动了一系列事件,之后会进入到一个功能完备的系统中,有时,这个过程不到一分钟.当你注销或者关机时 ...
- 详解嵌套ListView、ScrollView布局显示不全的问题
在项目开发中,可能经常遇到嵌套ListView.ScrollView的问题,就是重写onMeasure方法.解决如下 public class ExpandListView extends ListV ...
- 一文聊透 Netty IO 事件的编排利器 pipeline | 详解所有 IO 事件的触发时机以及传播路径
欢迎关注公众号:bin的技术小屋,本文图片加载不出来的话可查看公众号原文 本系列Netty源码解析文章基于 4.1.56.Final版本 1. 前文回顾 在前边的系列文章中,笔者为大家详细剖析了 Re ...
随机推荐
- 用c语言实现linux cat
话不多说,直接上代码: #include <stdio.h> void file_copy(FILE * file1,FILE * file2); int main(int argc,ch ...
- Eating Peach (peach)
Description On this day, the little monkey went looking for food. He came to a rectangular peach gar ...
- Oracle报错>记录被另外一个用户锁定
原因 当一个用户对数据进行修改时,若没有进行提交或者回滚,Oracle不允许其他用户修改该条数据,在这种情况下修改,就会出现:"记录被另外一个用户锁定"错误. 解决 查询用户.数据 ...
- 多测试_mysql数据库_09
什么是数据库? 是存放数据的电子仓库.以某种方式存储百万条,上亿条数据,供多个用户访问共享. 每个数据库都有一个或多个不同的api用于创建.访问,管理和复制所保存的数据. 数据库分关系型数据库和非关系 ...
- 并发压测 jmeter使用教程
百度网盘下载软件 提取码: 2nur 第一步:首先从jmeter的官网下载jmeter,目前最新版本为4.0,支持的JDK最高为1.8 下载地址: jmeter:http://jmeter.apach ...
- css中伪元素before或after中content的特殊用法attr【转】
[原文]https://segmentfault.com/a/1190000002750033 CSS中主要的伪元素有四个:before/after/first-letter/first-line,在 ...
- 第二十一章 PHP编译安装(centos7)
一.环境准备 主机 IP 身份 web01 10.0.0.7 编译安装PHP 二.准备安装 1.新建目录 [root@jindada ~]# mkdir /php 2.上传源码包并解压 [root@j ...
- 【Azure Redis 缓存 Azure Cache For Redis】当使用Jedis客户端连接Redis时候,遇见JedisConnectionException: Could not get a resource from the pool / Redis connection lost
问题情形 当在执行Redis一直指令时,有可能会遇见如下几种错误: 1) redis.clients.jedis.exceptions.JedisConnectionException: Could ...
- vue知识点12
知识点归纳整理如下: 1. 数组用下标改变,或者对象增加属性,这样的改变数据 是不能触发视图更新的,要用 Vue.set(对象,属性,值) 或this.$set(对象,属性,值) 2. this. ...
- JS 计算日期相减得天数
言简意赅不呼哨直接懂,可以封装的可以根据自己的需求封装一下 var date1="2020-10-23";var date2="2020-10-26";var ...