hourglassnet网络解析
hourglassnet中文名称是沙漏网络,起初用于人体关键点检测,代码,https://github.com/bearpaw/pytorch-pose
后来被广泛的应用到其他领域,我知道的有双目深度估计,关于双目深度估计,自己最近会写一篇blog,这里先简单介绍一下。双目深度估计第一次用hourglassnet是在psmnet(https://github.com/JiaRenChang/PSMNet)中使用的的,后来的很多双目深度估计的工作也有很多继承这种hourglass的使用方法,比如gwcnet(https://github.com/xy-guo/GwcNet)
在这里就详细解说一下hourglassnet的网络结构,hourglassnet作者已经公开了代码,这里参考这个代码:https://github.com/bearpaw/pytorch-pose/blob/master/pose/models/hourglass.py
代码如下
import torch.nn as nn
import torch.nn.functional as F
from tensorboardX import SummaryWriter
# from .preresnet import BasicBlock, Bottleneck
import torch
from torch.autograd import Variable class Bottleneck(nn.Module):
expansion = 2 def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__() self.bn1 = nn.BatchNorm2d(inplanes)
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=True)
self.bn2 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=True)
self.bn3 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 2, kernel_size=1, bias=True)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride def forward(self, x):
residual = x out = self.bn1(x)
out = self.relu(out)
out = self.conv1(out) out = self.bn2(out)
out = self.relu(out)
out = self.conv2(out) out = self.bn3(out)
out = self.relu(out)
out = self.conv3(out) if self.downsample is not None:
residual = self.downsample(x) out += residual return out # houglass实际上是一个大的auto encoder
class Hourglass(nn.Module):
def __init__(self, block, num_blocks, planes, depth):
super(Hourglass, self).__init__()
self.depth = depth
self.block = block
self.hg = self._make_hour_glass(block, num_blocks, planes, depth) def _make_residual(self, block, num_blocks, planes):
layers = []
for i in range(0, num_blocks):
layers.append(block(planes*block.expansion, planes))
return nn.Sequential(*layers) def _make_hour_glass(self, block, num_blocks, planes, depth):
hg = []
for i in range(depth):
res = []
for j in range(3):
res.append(self._make_residual(block, num_blocks, planes))
if i == 0:
res.append(self._make_residual(block, num_blocks, planes))
hg.append(nn.ModuleList(res))
return nn.ModuleList(hg) def _hour_glass_forward(self, n, x):
up1 = self.hg[n-1][0](x)
low1 = F.max_pool2d(x, 2, stride=2)
low1 = self.hg[n-1][1](low1) if n > 1:
low2 = self._hour_glass_forward(n-1, low1)
else:
low2 = self.hg[n-1][3](low1)
low3 = self.hg[n-1][2](low2)
up2 = F.interpolate(low3, scale_factor=2)
out = up1 + up2
return out def forward(self, x):
return self._hour_glass_forward(self.depth, x) class HourglassNet(nn.Module):
'''Hourglass model from Newell et al ECCV 2016'''
def __init__(self, block, num_stacks=2, num_blocks=4, num_classes=16):
super(HourglassNet, self).__init__() self.inplanes = 64
self.num_feats = 128
self.num_stacks = num_stacks
self.conv1 = nn.Conv2d(3, self.inplanes, kernel_size=7, stride=2, padding=3,
bias=True)
self.bn1 = nn.BatchNorm2d(self.inplanes)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self._make_residual(block, self.inplanes, 1)
self.layer2 = self._make_residual(block, self.inplanes, 1)
self.layer3 = self._make_residual(block, self.num_feats, 1)
self.maxpool = nn.MaxPool2d(2, stride=2) # build hourglass modules
ch = self.num_feats*block.expansion
hg, res, fc, score, fc_, score_ = [], [], [], [], [], []
for i in range(num_stacks):
hg.append(Hourglass(block, num_blocks, self.num_feats, 4))
res.append(self._make_residual(block, self.num_feats, num_blocks))
fc.append(self._make_fc(ch, ch))
score.append(nn.Conv2d(ch, num_classes, kernel_size=1, bias=True))
if i < num_stacks-1:
fc_.append(nn.Conv2d(ch, ch, kernel_size=1, bias=True))
score_.append(nn.Conv2d(num_classes, ch, kernel_size=1, bias=True))
self.hg = nn.ModuleList(hg)
self.res = nn.ModuleList(res)
self.fc = nn.ModuleList(fc)
self.score = nn.ModuleList(score)
self.fc_ = nn.ModuleList(fc_)
self.score_ = nn.ModuleList(score_) def _make_residual(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=True),
) layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes)) return nn.Sequential(*layers) def _make_fc(self, inplanes, outplanes):
bn = nn.BatchNorm2d(inplanes)
conv = nn.Conv2d(inplanes, outplanes, kernel_size=1, bias=True)
return nn.Sequential(
conv,
bn,
self.relu,
) def forward(self, x):
out = []
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x) x = self.layer1(x)
x = self.maxpool(x)
x = self.layer2(x)
x = self.layer3(x) for i in range(self.num_stacks):
y = self.hg[i](x)
y = self.res[i](y)
y = self.fc[i](y)
score = self.score[i](y)
out.append(score)
if i < self.num_stacks-1:
fc_ = self.fc_[i](y)
score_ = self.score_[i](score)
x = x + fc_ + score_ return out if __name__ == "__main__":
model = HourglassNet(Bottleneck, num_stacks=2, num_blocks=4, num_classes=2)
model2 = Hourglass(block=Bottleneck, num_blocks=4, planes=128, depth=4)
input_data = Variable(torch.rand(2, 3, 256, 256))
input_data2 = Variable(torch.rand(2, 256, 64, 64)) output = model(input_data)
print(output)
# writer = SummaryWriter(log_dir='../log', comment='source_arc')
# with writer:
# writer.add_graph(model2, (input_data2, ))
这里一步一步讲
以往的auto-ecoder最小的单元可能是一个卷积层,这里作者最小的单元是一个Bottleneck
作者先写了hourglss这个module,hourglass具体的网络结构如下,图片有点儿大,可以右键在新窗口中打开高清图片

为了区分我还是说明一下几个概念,
bottleneck构成hourglass模块
hourglass模块以及其他模块构成最后的hourglass net
bottle模块代码如下
class Bottleneck(nn.Module):
expansion = 2 def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__() self.bn1 = nn.BatchNorm2d(inplanes)
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=True)
self.bn2 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=True)
self.bn3 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 2, kernel_size=1, bias=True)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride def forward(self, x):
residual = x out = self.bn1(x)
out = self.relu(out)
out = self.conv1(out) out = self.bn2(out)
out = self.relu(out)
out = self.conv2(out) out = self.bn3(out)
out = self.relu(out)
out = self.conv3(out) if self.downsample is not None:
residual = self.downsample(x) out += residual return out
hourglass模块代码如下
# houglass实际上是一个大的auto encoder
class Hourglass(nn.Module):
def __init__(self, block, num_blocks, planes, depth):
super(Hourglass, self).__init__()
self.depth = depth
self.block = block
self.hg = self._make_hour_glass(block, num_blocks, planes, depth) def _make_residual(self, block, num_blocks, planes):
layers = []
for i in range(0, num_blocks):
layers.append(block(planes*block.expansion, planes))
return nn.Sequential(*layers) def _make_hour_glass(self, block, num_blocks, planes, depth):
hg = []
for i in range(depth):
res = []
for j in range(3):
res.append(self._make_residual(block, num_blocks, planes))
if i == 0:
res.append(self._make_residual(block, num_blocks, planes))
hg.append(nn.ModuleList(res))
return nn.ModuleList(hg) def _hour_glass_forward(self, n, x):
up1 = self.hg[n-1][0](x)
low1 = F.max_pool2d(x, 2, stride=2)
low1 = self.hg[n-1][1](low1) if n > 1:
low2 = self._hour_glass_forward(n-1, low1)
else:
low2 = self.hg[n-1][3](low1)
low3 = self.hg[n-1][2](low2)
up2 = F.interpolate(low3, scale_factor=2)
out = up1 + up2
return out def forward(self, x):
return self._hour_glass_forward(self.depth, x)
不仅仅是这里用到了bottleneck模块,后面的整体网络中也用到了此模块
如上图,bottleneck这个模块作为一个基本的单元构成了hourglass模块,可以看出网络还是挺庞大的,中间用pool进行降维,之后用F.interpolate函数进行升维,F.interpolate有一个参数是缩放多少倍,代替了反卷积复杂的步骤,直接进行成倍缩放。关于这个函数和反卷积之间的区别,我也不是特别理解
这样就基本上构成了一个大的auto-encoder,传统意义上来说,比如说分割,或者是其他的dense prediction的任务,到这里就结束了,因为一个auto-encoder就能够解决问题,但是作者不这样做,作者把这个架构作为一个基本的单元进行叠加,还可以重复很多这样的单元来提高精度,显然显存是一个很大的瓶颈,所以作者在实验的时候只叠了两层,见下图
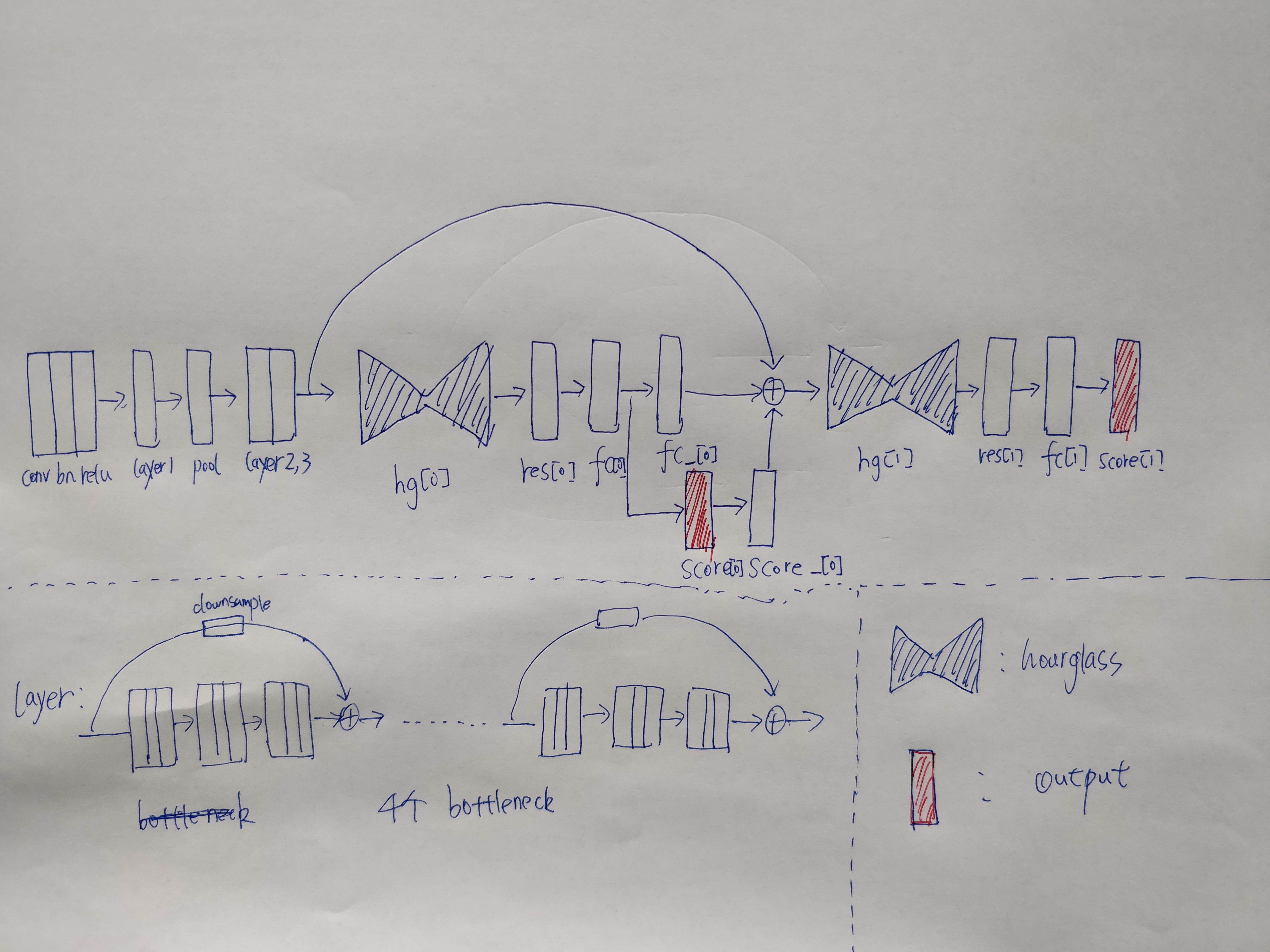
而在叠两层之前,显然需要对feature进行降维, 作者这里也是比较粗暴,用了三个大的layer,每个layer用4个基本的bottleneck,所以一共是12个bottleneck对图像进行降维以及提取high-level的feature,这个作者也在paper说明了,因为关键点检测依赖于高层次的语义信息,所以需要多加一些网络层。
实际上到这里,网络的参数已经少了,但是作者后面还跟了两个hourglass结构,每个hourglass网络结构后面跟一个输出,如上图的红色部分,所以作者实际上有两个输出,相当与是对中间提前加上监督信息。为了保证所有的channel是一致的,需要用一个score_模块进行通道的重新映射,然后和fc_得到的结果相加
上图中的一个hourglass后面跟了一个res模块,res模块是由4个bottleneck组成,不太清楚作者这里为何还用一个res模块
以及fc模块进行通道融合,最后score模块来保证正输出的channel和ground truth是一样的
大概就是这样的
hourglassnet网络解析的更多相关文章
- IOS 网络解析
网络解析同步异步 /*------------------------get同步-------------------------------------*/ - (IBAction)GET_TB:( ...
- 【读书笔记】iOS网络-解析响应负载
Web Service可以通过多种格式返回结构化数据, 不过大多数时候使用的是XML与JSON.也可以让应用只接收HTML结构的数据.实现了这些Web Service或是接收HTML文档的应用必须能解 ...
- GET/POST请求的使用《极客学院 --AFNetworking 2.x 网络解析详解--2》学习笔记
AFNetworking是开源代码排名第一的开源库. GET请求的请求正文 一般都是明文显示的,携带的数据量小. POST用于处理复杂的业务,并不用明文的请求,其实POST请求可以携带更多的参数,只 ...
- docker网络解析
Docker概念和默认网络 什么是Docker网络呢?总的来说,网络中的容器们可以相互通信,网络外的又访问不了这些容器.具体来说,在一个网络中,它是一个容器的集合,在这个概念里面的一个容器,它会通过容 ...
- openshift pod对外访问网络解析
openshift封装了k8s,在网络上结合ovs实现了多租户隔离,对外提供服务时报文需要经过ovs的tun0接口.下面就如何通过tun0访问pod(172.30.0.0/16)进行解析(下图来自理解 ...
- 网络请求的基本知识《极客学院 --AFNetworking 2.x 网络解析详解--1》学习笔记
网络请求的基本知识 我们网络请求用的是HTTP请求 Http请求格式:请求的方法,请求头,请求正文 Http请求的Request fields:请求的头部,以及被请求头部的一些设置 Http请求的 ...
- 网络解析之XML及JSON
首先要加入类库GDataXMLNode和JSON 解析本地文件Students.txt <students> <student> <name>汤姆 </nam ...
- 网络解析 get 和post
//get同步 - (IBAction)getT:(id)sender { //准备一个Url NSURL *url=[NSURL URLWithString:BASE_URL]; //创建一个请求对 ...
- 网络解析(一):LeNet-5详解
https://cuijiahua.com/blog/2018/01/dl_3.html 一.前言 LeNet-5出自论文Gradient-Based Learning Applied to Docu ...
随机推荐
- SoundPool 播放短声音
SoundPool 最大只能申请1M的内存空间,只能用一些很短的声音片段,而不是用它来播放歌曲或者做游戏背景音乐. 使用 SoundPool 播放短声音实现步骤如下: // 创建SoundPool实例 ...
- iOS UIBarButtonItem 固定尺寸
自定义UIBarButtonItem的时候发现 有时候UIBarButtonItem尺寸会发生变化 通过以下方式可以很好的解决问题 [button.widthAnchor constraintEqua ...
- 异步IO和协程
1-1.并行:真的多任务执行(CPU核数>=任务数):即在某个时刻点上,有多个程序同时运行在多个CPU上 1-2.并发:假的多任务执行(CPU核数<任务数):即一段时间内,有多个程序在同一 ...
- 用Python解方程
一元一次方程 例题1: 这是北师大版小学六年级上册课本95页的一道解方程练习题: 大家可以先口算一下,这道题里面的x的值为200 接下来我们用python来实现,代码如下,每一句代码后面都写有解释语: ...
- MongoDB 实体映射
@Id主键,不可重复,自带索引,可以在定义的列名上标注,需要自己生成并维护不重复的约束.如果自己不设置@Id主键,mongo会自动生成一个唯一主键,并且插入时效率远高于自己设置主键.在实际业务中不建议 ...
- 【VS开发】【Live555-rtsp】RTSP服务器实例live555源代码分析
原文地址:RTSP服务器实例live555源代码分析作者:mozheer 1. RTSP连接的建立过程 RTSPServer类用于构建一个RTSP服务器,该类同时在其内部定义了一个RTSPClient ...
- vue-router跳转相同路径报错
import Vue from 'vue' import Router from 'vue-router' // hack router push callback const originalPus ...
- airflow的web任务管理
ariflow里绿的代表都跑完了:红的表示有问题:点红的图标进去: 点tree view 红色表示那一天失败: 点进去看可以看log: 点clear则是重跑任务:
- [转帖]CentOS7安装xrdp(windows远程桌面连接linux)
CentOS7安装xrdp(windows远程桌面连接linux) https://blog.csdn.net/sgrrmswtvt/article/details/81869208 You Konw ...
- mysql数据库设计字符类型及长度
1.数字类型 小数的我就不聊了,因为有小数点的一般都是用字符串保存.关于整数,有几种可以选TINYINT.SMALLINT.MEDIUMINT.INT和BIGINT,分别占1.2.4.8字节.如果无符 ...