OMPL RRTConnet 生成路径和可视化
默认规划路径算法和RRTConnet路径规划算法生成路径
1. 源代码
#include <ompl/base/SpaceInformation.h>
#include <ompl/base/spaces/SE3StateSpace.h>
#include <ompl/geometric/planners/rrt/RRTConnect.h>
#include <ompl/geometric/SimpleSetup.h>
#include <ompl/config.h>
#include <iostream>
#include <fstream>
#include <ostream>
namespace ob = ompl::base;
namespace og = ompl::geometric;
bool isStateValid(const ob::State *state)
{
// cast the abstract state type to the type we expect
const auto *se3state = state->as<ob::SE3StateSpace::StateType>();
// extract the first component of the state and cast it to what we expect
const auto *pos = se3state->as<ob::RealVectorStateSpace::StateType>(0);
// extract the second component of the state and cast it to what we expect
const auto *rot = se3state->as<ob::SO3StateSpace::StateType>(1);
// check validity of state defined by pos & rot
// return a value that is always true but uses the two variables we define, so we avoid compiler warnings
return (const void*)rot != (const void*)pos;
}
void planWithSimpleSetup()
{
// construct the state space we are planning in
auto space(std::make_shared<ob::SE3StateSpace>());
// set the bounds for the R^3 part of SE(3)
ob::RealVectorBounds bounds(3);
bounds.setLow(-1);
bounds.setHigh(1);
space->setBounds(bounds);
// define a simple setup class
og::SimpleSetup ss(space);
// set state validity checking for this space
ss.setStateValidityChecker([](const ob::State *state) { return isStateValid(state); });
// create a random start state
ob::ScopedState<> start(space);
start.random();
// create a random goal state
ob::ScopedState<> goal(space);
goal.random();
// set the start and goal states
ss.setStartAndGoalStates(start, goal);
// this call is optional, but we put it in to get more output information
ss.setup();
ss.print();
// set planner
ob::PlannerPtr planner(new og::RRTConnect(ss.getSpaceInformation()));
ss.setPlanner(planner);
// attempt to solve the problem within one second of planning time
ob::PlannerStatus solved = ss.solve(1.0);
if (solved)
{
std::cout << "Found solution:" << std::endl;
std::ofstream ofs0("../plot/path0.dat");
ss.getSolutionPath().printAsMatrix(ofs0);
// print the path to screen
ss.simplifySolution();
ss.getSolutionPath().print(std::cout);
std::ofstream ofs("../plot/path.dat");
ss.getSolutionPath().printAsMatrix(ofs);
}
else
std::cout << "No solution found" << std::endl;
}
int main(int /*argc*/, char ** /*argv*/)
{
std::cout << "OMPL version: " << OMPL_VERSION << std::endl;
planWithSimpleSetup();
return 0;
}
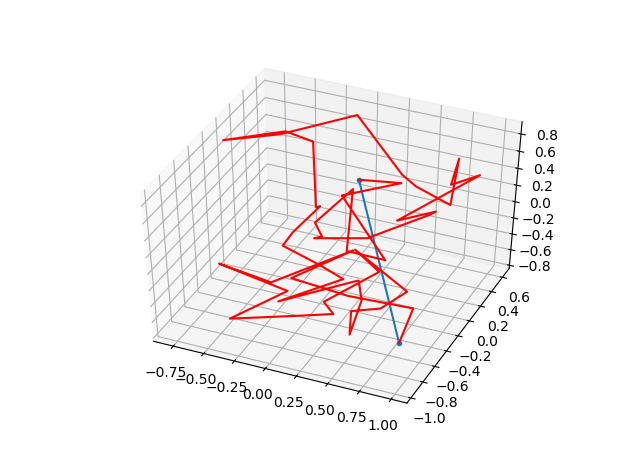
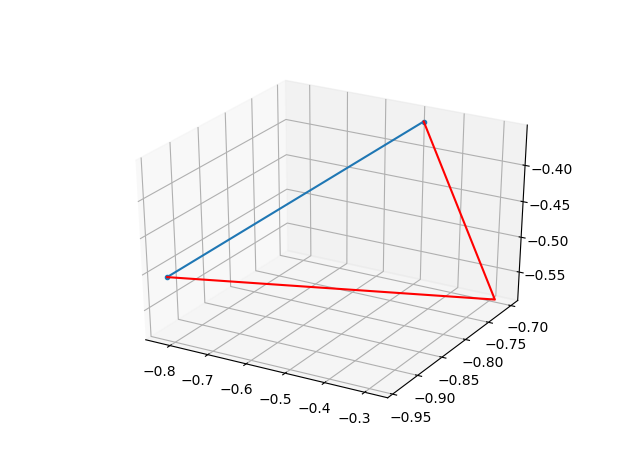
2. Python可视化生成的原始路径和简化路径
from mpl_toolkits.mplot3d import Axes3D
import numpy
import matplotlib.pyplot as plt
data = numpy.loadtxt('path.dat')
data1 = numpy.loadtxt('path0.dat')
fig = plt.figure()
ax = fig.gca(projection='3d')
ax.plot(data[:,0],data[:,1],data[:,2],'.-')
plt.hold('on')
plt.grid('on')
ax.plot(data1[:,0],data1[:,1],data1[:,2],'r-')
plt.show()
路径可视化方法可以参考官网 http://ompl.kavrakilab.org/pathVisualization.html
OMPL 参考列表
1. http://ompl.kavrakilab.org/group__demos.html
2. http://ompl.kavrakilab.org/tutorials.html
3. http://ompl.kavrakilab.org/gui.html#gui_paths
OMPL RRTConnet 生成路径和可视化的更多相关文章
- (转载)phpcms v9两步实现专题栏目生成路径去掉html和special
相信很多人都知道,phpcms v9专题是不支持自定义URL的,生成的专题路径是以/HTML/special/开头的.那么如何实现专题栏目生成路径去掉html和special呢?通过修改程序的PHP源 ...
- Xcode如何找到默认的生成路径?
我最近刚刚入门ObjectiveC,在研习<Objective C程序设计(第6版)>一书. 今天看到有关文件和归档的章节,但是我对XCode的生成文件路径并不了解,然后,在调试代码的时候 ...
- npm run build生成路径问题
vue项目中可以使用npm run build 命令生成静态文件夹dist,开发者可以直接点击dist文件夹下面的index.html问价来访问自己的项目,但是用vue-cli生成的项目,当运行npm ...
- mac自动生成路径问题
使用myBatis的逆向工程,一直无法生成.最后找同事帮忙,最终发现是 :路径前面少加一个反斜杠... 也就是 mac的绝对路径 前面需要加上 反斜杠.
- Linux下设置Core文件生成路径及文件名
修改core dump文件路径: 方法1:临时修改: 修改/proc/sys/kernel/core_pattern文件/proc目录本身动态加载每次系统重启都会重新加载因此种方法只能作临时修改/p ...
- Cadence Allegro小技巧之指定Gerber生成路径
Allegro生成Gerber数据时,默认会保存在与pcb文件相同目录路径下,Gerber数据本身就会生成好几个文件,然后与pcb文件,log文件,临时文件等混杂在一起,不易整理打包Gerber数据, ...
- 修改maven的war包生成路径
因为要配合jenkins,所以控制了war包的生成目录: <plugins> <!--打war包到指定的目录下 --> <plugin> <groupId&g ...
- symfony中模板生成路径两种方式
1. 使用url('route_a_b_c') 这种方式会是全路径 : http://www.test.com/a/b/c 2. 使用path('route_a_b_c') 这种方式只是路径: /a ...
- .NetCore利用Swagger生成 XML文档需要注意生成路径的地址
发布的时候如果用 release dotnet publish --configuration release dotnet publish 默认都是debug 会出现 XML丢失问题,其实可以看下工 ...
随机推荐
- 0030redis主从复制以及哨兵模式的搭建
------------------------------redis主从备份以及哨兵模式------------------------------------------------------- ...
- Idea和eclipse安装activiti插件
eclipse安装:help>install new software>add 有外网状态下 输入 :http://www.activiti.org/design ...
- Window10安装linux
准备材料:安装虚拟机工具 VMware-workstation-full-12.5.5-5234757.exe 虚拟机CentOS CentOS-7-x86_64-DVD-1511.ios或者Ce ...
- 学习Spring-Data-Jpa(四)---Naming命名策略,源码跟踪
1.首先在Entity实体中,命名方式有两种: 一种是显示命名,即通过@Table的name属性指定对应的数据库表名称,@Column的name属性指定实体字段对应数据库字段的名称. 另一种是隐式命名 ...
- 180908 python 字符串内建函数
Python 的字符串内建函数 Python 的字符串常用内建函数如下: 序号 方法及描述 1 capitalize()将字符串的第一个字符转换为大写 2 center(width, fillchar ...
- Oracle误删除数据恢复。Oracle删除后恢复数据
发现误删除时需要及时处理,速度要快,姿势要帅.晚了就恢复不了额 1.查询时间 以确保恢复到某个时间点 select SQL_TEXT, LAST_ACTIVE_TIME from v$sqlarea ...
- Pytest权威教程27-Bash自动补全设置
目录 Bash自动补全设置 返回: Pytest权威教程 Bash自动补全设置 在Linux/Mac bash shell环境下,可以使用argcomplete对pytest命令进行自动补全.首先要安 ...
- HDU 6086 Rikka with String ——(AC自动机 + DP)
这是一个AC自动机+dp的问题,在中间的串的处理可以枚举中断点来插入自动机内来实现,具体参见代码. 在这题上不止为何一直MLE,一直找不到结果(lyf相同写法的代码消耗内存较少),还好考虑到这题节点应 ...
- shell脚本实例,通向shell脚本大师的必经之路
概述 读书百遍其义自见,shell脚本也是,只要例子看得多了,自然就知道怎么写了.这里主要整理了20几个例子,因为内容比较多,所以分了几次来做介绍了.下面的实例最好先自己思考怎么去实现,然后再看下实现 ...
- 为什么要监控sql语句,以及如何监控,都有哪几种方式可以监控。
快速阅读 为什么要监控sql语句,以及如何监控,都有哪几种方式可以监控. 我们知道sql server 中有个工具叫sql profile ,可以实时监控sql server中 执行的sql 语句,以 ...