rIoTboard学习系列
刚在咸鱼买了块开发板,比较老了14年的,SOC为imx6solo,内核3.10,uboot2009的,准备先移植一个较新的uboot
到nxp的git下获取他们维护的uboot,网址http://git.freescale.com/git/cgit.cgi/imx/uboot-imx.git
选择imx_v2016.03_4.1.15_2.0_ga的brance,git太慢了,直接下载rel_imx_4.1.15_1.2.0_ga.tar.bz2源码包。
到Makefile中更改CROSS_COMPILE
make riotboard_defconfig
make -j8
出现
riotboard/rel_imx_4.1.15_1.2.0_ga/arch/arm/imx-common/cpu.c:199: undefined reference to `uclass_get_device'
查看配置文件是没定义CONFIG_DM相关的就是驱动模型,因为这个板子uboot是维护的,所以就换了个版本
仓库地址https://gitlab.denx.de/u-boot/u-boot/tree/v2016.09
这次顺利通过编译,下载到tf卡上启动没有反应,串口无输出。中间反复检查了很多方面,到最终成功启动有两个问题
1.烧写命令dd iflag=dsync oflag=dsync if=u-boot.imx of=/dev/sdb seek=2
seek=blocks:从输出文件开头跳过blocks个块后再开始复制
uboot.imx = ivt + dcd + uboot.bin
imx的soc通过sd启动时,u-boot.imx要有一个0x400的offset,也就是1024字节,sd卡一个扇区512byte,所以跳过2个扇区,从第三个扇区烧写
开始时没搞清seek的定义,一直用的seek=3....
2.拨码开关
使用手册的截图
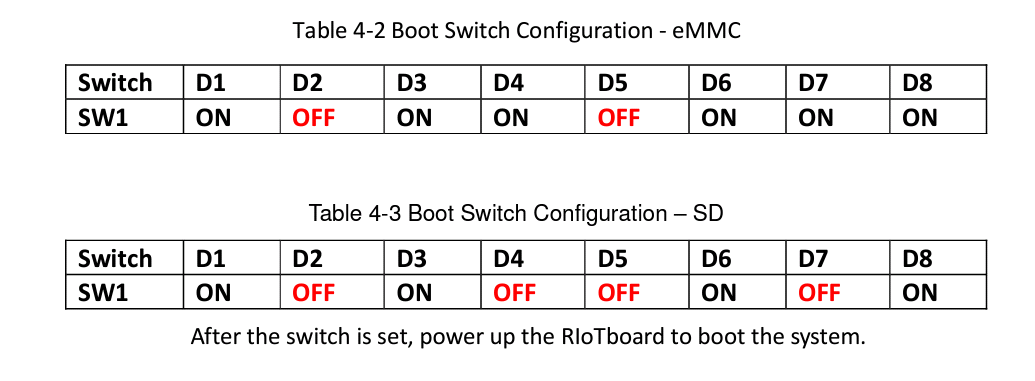
重点来了,这个是背后的SD大卡的启动选项。。。。
发现这点是在网上搜到的一个pdf

调整后顺利启动
调老板子运气真的挺重要的,这个开发板国内资料真的没多少,而且都是3.x的。
还有个小细节,上面说的u-boot.imx是通过uboot自带的工具./tool/imximage实现的在正常的uboot.bin前加上必要的数据(例如内存初始化等),其中的数据想DCD等都是保存在/board/xxx/xxx.cfg 里的,但是这块开发板下没有 .cfg,而在/configs/riotboard_defconfig中指定了CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/boundary/nitrogen6x/nitrogen6s1g.cfg,MX6S,DDR_MB=1024,ENV_IS_IN_MMC"
即nitrogen6s的板子,查看发现其中一句 BOOT_FROM spi ,修改为sd。后来测试即使是spi也可以正常启动,没有深入研究。
最终uboot还是用的rel_imx_4.1.15_2.0.0_ga,就是nxp git下的,make riotboard_defconfig 出现找不到ldo_mode_set这个函数的定义,
因为在board/embest/mx6boards/mx6boards.c中没有实现,在bug信息的xxx/cpu.c中有如下代码
#if defined(CONFIG_LDO_BYPASS_CHECK)
ldo_mode_set(check_ldo_bypass());
#endif
于是在include/configs/embestmx6boards.h 最后 #undef CONFIG_LDO_BYPASS_CHECK
编译通过。
启动后ping不通:
Using FEC device
ARP Retry count exceeded; starting again
ping failed; host 192.168.0.12 is not alive
试了网上说的增加TIMEOUT的值,试了也没有效果。后来参考embest维护的3.x的uboot
注释掉board/embest/mx6boards/mx6boards.c中
#if 1
int mx6_rgmii_rework(struct phy_device *phydev)
{
/* from linux/arch/arm/mach-imx/mach-imx6q.c :
* Ar803x phy SmartEEE feature cause link status generates glitch,
* which cause ethernet link down/up issue, so disable SmartEEE
*/
phy_write(phydev, MDIO_DEVAD_NONE, 0xd, 0x7);
phy_write(phydev, MDIO_DEVAD_NONE, 0xe, 0x805d);
phy_write(phydev, MDIO_DEVAD_NONE, 0xd, 0x4003);
return 0;
}
#endif
添加
int mx6_rgmii_rework(struct phy_device *phydev)
{
unsigned short val;
/* To enable AR8031 ouput a 125MHz clk from CLK_25M */
phy_write(phydev, MDIO_DEVAD_NONE, 0xd, 0x7);
phy_write(phydev, MDIO_DEVAD_NONE, 0xe, 0x8016);
phy_write(phydev, MDIO_DEVAD_NONE, 0xd, 0x4007);
val = phy_read(phydev, MDIO_DEVAD_NONE, 0xe);
val &= 0xffe3;
val |= 0x18;
phy_write(phydev, MDIO_DEVAD_NONE, 0xe, val);
/* introduce tx clock delay */
phy_write(phydev, MDIO_DEVAD_NONE, 0x1d, 0x5);
val = phy_read(phydev, MDIO_DEVAD_NONE, 0x1e);
val |= 0x0100;
phy_write(phydev, MDIO_DEVAD_NONE, 0x1e, val);
return 0;
}
顺利ping通。
rIoTboard学习系列的更多相关文章
- 分布式学习系列【dubbo入门实践】
分布式学习系列[dubbo入门实践] dubbo架构 组成部分:provider,consumer,registry,monitor: provider,consumer注册,订阅类似于消息队列的注册 ...
- Entity Framework Code First学习系列目录
Entity Framework Code First学习系列说明:开发环境为Visual Studio 2010 + Entity Framework 5.0+MS SQL Server 2012, ...
- WCF学习系列汇总
最近在学习WCF,打算把一整个系列的文章都”写“出来,包括理论和实践,这里的“写”是翻译,是国外的大牛写好的,我只是搬运工外加翻译.翻译的不好,大家请指正,谢谢了.如果觉得不错的话,也可以给我点赞,这 ...
- EF(Entity Framework)系统学习系列
好久没写博客了,继续开启霸屏模式,好了,废话不多说,这次准备重新系统学一下EF,一个偶然的机会找到了一个学习EF的网站(http://www.entityframeworktutorial.net/) ...
- MVC学习系列4--@helper辅助方法和用户自定义HTML方法
在HTML Helper,帮助类的帮助下,我们可以动态的创建HTML控件.HTML帮助类是在视图中,用来呈现HTML内容的.HTML帮助类是一个方法,它返回的是string类型的值. HTML帮助类, ...
- YYKit学习系列 ---- 开篇
准备花半年时间系统学习YYKit, 学习过程会放入"YYKit学习系列"这个分类, 喜欢YYKit的可以随时留意我的文章, 一起学习!!!
- RabbitMQ学习系列(四): 几种Exchange 模式
上一篇,讲了RabbitMQ的具体用法,可以看看这篇文章:RabbitMQ学习系列(三): C# 如何使用 RabbitMQ.今天说些理论的东西,Exchange 的几种模式. AMQP协议中的核心思 ...
- RabbitMQ学习系列(三): C# 如何使用 RabbitMQ
上一篇已经讲了Rabbitmq如何在Windows平台安装,还不了解如何安装的朋友,请看我前面几篇文章:RabbitMQ学习系列一:windows下安装RabbitMQ服务 , 今天就来聊聊 C# 实 ...
- [翻译svg教程]svg学习系列 开篇
目录 [翻译svg教程]svg学习系列 开篇 [翻译svg教程 ]svg 的坐标系统 [翻译svg教程]svg 中的g元素 [翻译svg教程]svg中矩形元素 rect [翻译svg教程]svg中的c ...
随机推荐
- HTML+css基础 css选择器的种类
css选择器的种类 标签 权重是001 类 class权重是0010 相当于255个标签选择器 Id 权重是0100相当于255个类 *通配符 代表所有的标签 权重是0000 后代选 ...
- 简述vue props和非props的2个特性
props的2个特性 ①:父组件通过属性的方式传值(比如下面截图中的content)给子组件,content不会显示在DOM节点中 ②:父组件向子组件传递值 ...
- ubuntu删除文件和文件夹的rm命令
在Ubuntu中好多文件或文件夹是不能使用右键删除的,因此知道删除文件或文件夹的rm命令显得尤为重要. rm命令的语法 rm [选项] 文件名或文件夹名 rm命令的一些选项 -f.--force 强力 ...
- idea 项目在一般模式下可以正常启动,在debug模式下无法启动,像是卡住了的感觉
项目一般模式下可以启动,debug模式下就是启动不了,后经过排查发现打的有断点,断点取消在重启立马就可以啦. Method breakpoints may dramatically slow down ...
- Java面试- JVM 内存模型讲解
经常有人会有这么一个疑惑,难道 Java 开发就一定要懂得 JVM 的原理吗?我不懂 JVM ,但我照样可以开发.确实,但如果懂得了 JVM ,可以让你在技术的这条路上走的更远一些. JVM 的重要性 ...
- 高强度学习训练第四天总结:JVM+Redis
JVM 复习了JVM堆内存的几个模块. 复习了JVM的几个控制工具. 复习了JVM发展历史 Redis 复习了Redis的事务控制.
- Qt 连接MySQL
工程文件 QT += sql 举例 QSqlDatabase db = QSqlDatabase::addDatabase("QMYSQL"); db.setHostName(&q ...
- vue-cli3.0创建项目之完成登录页面
借鉴博客:https://www.cnblogs.com/KenFine/p/10850386.html 接着上一个创建的新项目vue-mydemo01来: 1.创建一个login.vue组件页面:如 ...
- 基于记忆性的中值滤波O(r)与O(1)复杂度的算法实现
本文参考博客:https://www.cnblogs.com/Imageshop/archive/2013/04/26/3045672.html 原生的中值滤波是基于排序算法的,这样的算法复杂度基本在 ...
- Lnmp搭建zabbix运维监控系统
使用目的? 在公司项目中需要做一个日志监控,最开始选择的是efk,但是efk的资料相对较少并且之前对这几个产品都没接触过,使用起来难度.于是选择了zabbix作为项目的运维监控系统. zabbix能做 ...