0_Simple__simpleCubemapTexture
立方体纹理贴图
▶ 源代码。用纹理方法把元素按原顺序从 CUDA3D 数组中取出来,求个相反数放入全局内存,输出。
#include <stdio.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <helper_functions.h>
#include <helper_cuda.h> #define MIN_EPSILON_ERROR 5e-3f texture<float, cudaTextureTypeCubemap> tex; __global__ void transformKernel(float *g_odata, int width)
{
unsigned int x = blockIdx.x*blockDim.x + threadIdx.x;
unsigned int y = blockIdx.y*blockDim.y + threadIdx.y; float u = ((x + 0.5f) / (float)width) * .f - .f;// [0, width-1] 间隔 1 的坐标变换为 [-1+1/width,1-1/width] 间隔 1/width 的坐标
float v = ((y + 0.5f) / (float)width) * .f - .f; float cx, cy, cz; for (unsigned int face = ; face < ; face++)
{
if (face == )// x 正层
{
cx = ;
cy = -v;
cz = -u;
}
else if (face == )// x 负层
{
cx = -;
cy = -v;
cz = u;
}
else if (face == )// y 正层
{
cx = u;
cy = ;
cz = v;
}
else if (face == )// y 负层
{
cx = u;
cy = -;
cz = -v;
}
else if (face == )// z 正层
{
cx = u;
cy = -v;
cz = ;
}
else if (face == )// z 负层
{
cx = -u;
cy = -v;
cz = -;
}
g_odata[face*width*width + y*width + x] = - texCubemap(tex, cx, cy, cz);// 纹理数据读取到全局内存中输出
}
} int main(int argc, char** argv)
{
unsigned int width = , num_faces = , num_layers = ;
unsigned int cubemap_size = width * width * num_faces;
unsigned int size = cubemap_size * num_layers * sizeof(float);
float *h_data = (float *)malloc(size);
float *h_data_ref = (float *)malloc(size); // 理论输出
float *d_data = NULL;
cudaMalloc((void **)&d_data, size); for (int i = ; i < (int)(cubemap_size * num_layers); i++)
h_data[i] = (float)i;
for (unsigned int layer = ; layer < num_layers; layer++)
{
for (int i = ; i < (int)(cubemap_size); i++)
h_data_ref[layer*cubemap_size + i] = -h_data[layer*cubemap_size + i] + layer;
} printf("\n\t\Input data.n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width *width) == )
printf("\n\t");
}
printf("\n\tIdeal output data\n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data_ref[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width *width) == )
printf("\n\t");
} // 设置 CUDA 3D 数组参数和数据拷贝
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(, , , , cudaChannelFormatKindFloat);
cudaArray *cu_3darray;
cudaMalloc3DArray(&cu_3darray, &channelDesc, make_cudaExtent(width, width, num_faces), cudaArrayCubemap);
cudaMemcpy3DParms myparms = { };
myparms.srcPos = make_cudaPos(, , );
myparms.dstPos = make_cudaPos(, , );
myparms.srcPtr = make_cudaPitchedPtr(h_data, width * sizeof(float), width, width);
myparms.dstArray = cu_3darray;
myparms.extent = make_cudaExtent(width, width, num_faces);
myparms.kind = cudaMemcpyHostToDevice;
cudaMemcpy3D(&myparms); // 设置纹理参数并绑定
tex.addressMode[] = cudaAddressModeWrap;
tex.addressMode[] = cudaAddressModeWrap;
tex.filterMode = cudaFilterModeLinear;
tex.normalized = true;
cudaBindTextureToArray(tex, cu_3darray, channelDesc); dim3 dimBlock(, , );
dim3 dimGrid(width / dimBlock.x, width / dimBlock.y, );
printf("\n\tCubemap data of %d * %d * %d: Grid size is %d x %d, each block has 8 x 8 threads.\n", width, width, num_layers, dimGrid.x, dimGrid.y);
transformKernel << < dimGrid, dimBlock >> >(d_data, width);// 预跑
cudaDeviceSynchronize(); StopWatchInterface *timer = NULL;// 新的计时工具
sdkCreateTimer(&timer);
sdkStartTimer(&timer); transformKernel << < dimGrid, dimBlock, >> >(d_data, width);
cudaDeviceSynchronize(); sdkStopTimer(&timer);
printf("\n\Time: %.3f msec, %.2f Mtexlookups/sec\n", sdkGetTimerValue(&timer), (cubemap_size / (sdkGetTimerValue(&timer) / 1000.0f) / 1e6));
sdkDeleteTimer(&timer); // 返回计算结果并检验
memset(h_data, , size);
cudaMemcpy(h_data, d_data, size, cudaMemcpyDeviceToHost);
if (checkCmdLineFlag(argc, (const char **)argv, "regression"))
sdkWriteFile<float>("./data/regression.dat", h_data, width * width, 0.0f, false);
else
printf("Comparing kernel output to expected data return %d\n", compareData(h_data, h_data_ref, cubemap_size, MIN_EPSILON_ERROR, 0.0f)); printf("\n\tActual output data\n\t");
for (int i = ; i < width * num_faces * num_layers; i++)
{
printf("%2.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n\t");
if ((i + ) % (width * width) == )
printf("\n\t");
} free(h_data);
free(h_data_ref);
cudaFree(d_data);
cudaFreeArray(cu_3darray); getchar();
return ;
}
▶ 输出结果
Input data.n 0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0 11.0 12.0 13.0 14.0 15.0 16.0 17.0 18.0 19.0 20.0 21.0 22.0 23.0 24.0 25.0 26.0 27.0 28.0 29.0 30.0 31.0 32.0 33.0 34.0 35.0 36.0 37.0 38.0 39.0 40.0 41.0 42.0 43.0 44.0 45.0 46.0 47.0 48.0 49.0 50.0 51.0 52.0 53.0 54.0 55.0 56.0 57.0 58.0 59.0 60.0 61.0 62.0 63.0
64.0 65.0 66.0 67.0 68.0 69.0 70.0 71.0 72.0 73.0 74.0 75.0 76.0 77.0 78.0 79.0 80.0 81.0 82.0 83.0 84.0 85.0 86.0 87.0 88.0 89.0 90.0 91.0 92.0 93.0 94.0 95.0 96.0 97.0 98.0 99.0 100.0 101.0 102.0 103.0 104.0 105.0 106.0 107.0 108.0 109.0 110.0 111.0 112.0 113.0 114.0 115.0 116.0 117.0 118.0 119.0 120.0 121.0 122.0 123.0 124.0 125.0 126.0 127.0
128.0 129.0 130.0 131.0 132.0 133.0 134.0 135.0 136.0 137.0 138.0 139.0 140.0 141.0 142.0 143.0 144.0 145.0 146.0 147.0 148.0 149.0 150.0 151.0 152.0 153.0 154.0 155.0 156.0 157.0 158.0 159.0 160.0 161.0 162.0 163.0 164.0 165.0 166.0 167.0 168.0 169.0 170.0 171.0 172.0 173.0 174.0 175.0 176.0 177.0 178.0 179.0 180.0 181.0 182.0 183.0 184.0 185.0 186.0 187.0 188.0 189.0 190.0 191.0
192.0 193.0 194.0 195.0 196.0 197.0 198.0 199.0 200.0 201.0 202.0 203.0 204.0 205.0 206.0 207.0 208.0 209.0 210.0 211.0 212.0 213.0 214.0 215.0 216.0 217.0 218.0 219.0 220.0 221.0 222.0 223.0 224.0 225.0 226.0 227.0 228.0 229.0 230.0 231.0 232.0 233.0 234.0 235.0 236.0 237.0 238.0 239.0 240.0 241.0 242.0 243.0 244.0 245.0 246.0 247.0 248.0 249.0 250.0 251.0 252.0 253.0 254.0 255.0
256.0 257.0 258.0 259.0 260.0 261.0 262.0 263.0 264.0 265.0 266.0 267.0 268.0 269.0 270.0 271.0 272.0 273.0 274.0 275.0 276.0 277.0 278.0 279.0 280.0 281.0 282.0 283.0 284.0 285.0 286.0 287.0 288.0 289.0 290.0 291.0 292.0 293.0 294.0 295.0 296.0 297.0 298.0 299.0 300.0 301.0 302.0 303.0 304.0 305.0 306.0 307.0 308.0 309.0 310.0 311.0 312.0 313.0 314.0 315.0 316.0 317.0 318.0 319.0
320.0 321.0 322.0 323.0 324.0 325.0 326.0 327.0 328.0 329.0 330.0 331.0 332.0 333.0 334.0 335.0 336.0 337.0 338.0 339.0 340.0 341.0 342.0 343.0 344.0 345.0 346.0 347.0 348.0 349.0 350.0 351.0 352.0 353.0 354.0 355.0 356.0 357.0 358.0 359.0 360.0 361.0 362.0 363.0 364.0 365.0 366.0 367.0 368.0 369.0 370.0 371.0 372.0 373.0 374.0 375.0 376.0 377.0 378.0 379.0 380.0 381.0 382.0 383.0 Ideal output data
0.0 -1.0 -2.0 -3.0 -4.0 -5.0 -6.0 -7.0 -8.0 -9.0 -10.0 -11.0 -12.0 -13.0 -14.0 -15.0 -16.0 -17.0 -18.0 -19.0 -20.0 -21.0 -22.0 -23.0 -24.0 -25.0 -26.0 -27.0 -28.0 -29.0 -30.0 -31.0 -32.0 -33.0 -34.0 -35.0 -36.0 -37.0 -38.0 -39.0 -40.0 -41.0 -42.0 -43.0 -44.0 -45.0 -46.0 -47.0 -48.0 -49.0 -50.0 -51.0 -52.0 -53.0 -54.0 -55.0 -56.0 -57.0 -58.0 -59.0 -60.0 -61.0 -62.0 -63.0
-64.0 -65.0 -66.0 -67.0 -68.0 -69.0 -70.0 -71.0 -72.0 -73.0 -74.0 -75.0 -76.0 -77.0 -78.0 -79.0 -80.0 -81.0 -82.0 -83.0 -84.0 -85.0 -86.0 -87.0 -88.0 -89.0 -90.0 -91.0 -92.0 -93.0 -94.0 -95.0 -96.0 -97.0 -98.0 -99.0 -100.0 -101.0 -102.0 -103.0 -104.0 -105.0 -106.0 -107.0 -108.0 -109.0 -110.0 -111.0 -112.0 -113.0 -114.0 -115.0 -116.0 -117.0 -118.0 -119.0 -120.0 -121.0 -122.0 -123.0 -124.0 -125.0 -126.0 -127.0
-128.0 -129.0 -130.0 -131.0 -132.0 -133.0 -134.0 -135.0 -136.0 -137.0 -138.0 -139.0 -140.0 -141.0 -142.0 -143.0 -144.0 -145.0 -146.0 -147.0 -148.0 -149.0 -150.0 -151.0 -152.0 -153.0 -154.0 -155.0 -156.0 -157.0 -158.0 -159.0 -160.0 -161.0 -162.0 -163.0 -164.0 -165.0 -166.0 -167.0 -168.0 -169.0 -170.0 -171.0 -172.0 -173.0 -174.0 -175.0 -176.0 -177.0 -178.0 -179.0 -180.0 -181.0 -182.0 -183.0 -184.0 -185.0 -186.0 -187.0 -188.0 -189.0 -190.0 -191.0
-192.0 -193.0 -194.0 -195.0 -196.0 -197.0 -198.0 -199.0 -200.0 -201.0 -202.0 -203.0 -204.0 -205.0 -206.0 -207.0 -208.0 -209.0 -210.0 -211.0 -212.0 -213.0 -214.0 -215.0 -216.0 -217.0 -218.0 -219.0 -220.0 -221.0 -222.0 -223.0 -224.0 -225.0 -226.0 -227.0 -228.0 -229.0 -230.0 -231.0 -232.0 -233.0 -234.0 -235.0 -236.0 -237.0 -238.0 -239.0 -240.0 -241.0 -242.0 -243.0 -244.0 -245.0 -246.0 -247.0 -248.0 -249.0 -250.0 -251.0 -252.0 -253.0 -254.0 -255.0
-256.0 -257.0 -258.0 -259.0 -260.0 -261.0 -262.0 -263.0 -264.0 -265.0 -266.0 -267.0 -268.0 -269.0 -270.0 -271.0 -272.0 -273.0 -274.0 -275.0 -276.0 -277.0 -278.0 -279.0 -280.0 -281.0 -282.0 -283.0 -284.0 -285.0 -286.0 -287.0 -288.0 -289.0 -290.0 -291.0 -292.0 -293.0 -294.0 -295.0 -296.0 -297.0 -298.0 -299.0 -300.0 -301.0 -302.0 -303.0 -304.0 -305.0 -306.0 -307.0 -308.0 -309.0 -310.0 -311.0 -312.0 -313.0 -314.0 -315.0 -316.0 -317.0 -318.0 -319.0
-320.0 -321.0 -322.0 -323.0 -324.0 -325.0 -326.0 -327.0 -328.0 -329.0 -330.0 -331.0 -332.0 -333.0 -334.0 -335.0 -336.0 -337.0 -338.0 -339.0 -340.0 -341.0 -342.0 -343.0 -344.0 -345.0 -346.0 -347.0 -348.0 -349.0 -350.0 -351.0 -352.0 -353.0 -354.0 -355.0 -356.0 -357.0 -358.0 -359.0 -360.0 -361.0 -362.0 -363.0 -364.0 -365.0 -366.0 -367.0 -368.0 -369.0 -370.0 -371.0 -372.0 -373.0 -374.0 -375.0 -376.0 -377.0 -378.0 -379.0 -380.0 -381.0 -382.0 -383.0 Cubemap data of * * : Grid size is x , each block has x threads. Time: 0.098 msec, 249.50 Mtexlookups/sec
Comparing kernel output to expected data return Actual output data
-0.0 -1.0 -2.0 -3.0 -4.0 -5.0 -6.0 -7.0 -8.0 -9.0 -10.0 -11.0 -12.0 -13.0 -14.0 -15.0 -16.0 -17.0 -18.0 -19.0 -20.0 -21.0 -22.0 -23.0 -24.0 -25.0 -26.0 -27.0 -28.0 -29.0 -30.0 -31.0 -32.0 -33.0 -34.0 -35.0 -36.0 -37.0 -38.0 -39.0 -40.0 -41.0 -42.0 -43.0 -44.0 -45.0 -46.0 -47.0 -48.0 -49.0 -50.0 -51.0 -52.0 -53.0 -54.0 -55.0 -56.0 -57.0 -58.0 -59.0 -60.0 -61.0 -62.0 -63.0
-64.0 -65.0 -66.0 -67.0 -68.0 -69.0 -70.0 -71.0 -72.0 -73.0 -74.0 -75.0 -76.0 -77.0 -78.0 -79.0 -80.0 -81.0 -82.0 -83.0 -84.0 -85.0 -86.0 -87.0 -88.0 -89.0 -90.0 -91.0 -92.0 -93.0 -94.0 -95.0 -96.0 -97.0 -98.0 -99.0 -100.0 -101.0 -102.0 -103.0 -104.0 -105.0 -106.0 -107.0 -108.0 -109.0 -110.0 -111.0 -112.0 -113.0 -114.0 -115.0 -116.0 -117.0 -118.0 -119.0 -120.0 -121.0 -122.0 -123.0 -124.0 -125.0 -126.0 -127.0
-128.0 -129.0 -130.0 -131.0 -132.0 -133.0 -134.0 -135.0 -136.0 -137.0 -138.0 -139.0 -140.0 -141.0 -142.0 -143.0 -144.0 -145.0 -146.0 -147.0 -148.0 -149.0 -150.0 -151.0 -152.0 -153.0 -154.0 -155.0 -156.0 -157.0 -158.0 -159.0 -160.0 -161.0 -162.0 -163.0 -164.0 -165.0 -166.0 -167.0 -168.0 -169.0 -170.0 -171.0 -172.0 -173.0 -174.0 -175.0 -176.0 -177.0 -178.0 -179.0 -180.0 -181.0 -182.0 -183.0 -184.0 -185.0 -186.0 -187.0 -188.0 -189.0 -190.0 -191.0
-192.0 -193.0 -194.0 -195.0 -196.0 -197.0 -198.0 -199.0 -200.0 -201.0 -202.0 -203.0 -204.0 -205.0 -206.0 -207.0 -208.0 -209.0 -210.0 -211.0 -212.0 -213.0 -214.0 -215.0 -216.0 -217.0 -218.0 -219.0 -220.0 -221.0 -222.0 -223.0 -224.0 -225.0 -226.0 -227.0 -228.0 -229.0 -230.0 -231.0 -232.0 -233.0 -234.0 -235.0 -236.0 -237.0 -238.0 -239.0 -240.0 -241.0 -242.0 -243.0 -244.0 -245.0 -246.0 -247.0 -248.0 -249.0 -250.0 -251.0 -252.0 -253.0 -254.0 -255.0
-256.0 -257.0 -258.0 -259.0 -260.0 -261.0 -262.0 -263.0 -264.0 -265.0 -266.0 -267.0 -268.0 -269.0 -270.0 -271.0 -272.0 -273.0 -274.0 -275.0 -276.0 -277.0 -278.0 -279.0 -280.0 -281.0 -282.0 -283.0 -284.0 -285.0 -286.0 -287.0 -288.0 -289.0 -290.0 -291.0 -292.0 -293.0 -294.0 -295.0 -296.0 -297.0 -298.0 -299.0 -300.0 -301.0 -302.0 -303.0 -304.0 -305.0 -306.0 -307.0 -308.0 -309.0 -310.0 -311.0 -312.0 -313.0 -314.0 -315.0 -316.0 -317.0 -318.0 -319.0
-320.0 -321.0 -322.0 -323.0 -324.0 -325.0 -326.0 -327.0 -328.0 -329.0 -330.0 -331.0 -332.0 -333.0 -334.0 -335.0 -336.0 -337.0 -338.0 -339.0 -340.0 -341.0 -342.0 -343.0 -344.0 -345.0 -346.0 -347.0 -348.0 -349.0 -350.0 -351.0 -352.0 -353.0 -354.0 -355.0 -356.0 -357.0 -358.0 -359.0 -360.0 -361.0 -362.0 -363.0 -364.0 -365.0 -366.0 -367.0 -368.0 -369.0 -370.0 -371.0 -372.0 -373.0 -374.0 -375.0 -376.0 -377.0 -378.0 -379.0 -380.0 -381.0 -382.0 -383.0
▶ 涨姿势
● helper_time.h 中新定义的计时函数
// 关键步骤
StopWatchInterface *timer = NULL;
sdkCreateTimer(&timer);
sdkStartTimer(&timer); sdkStopTimer(&timer);
sdkGetTimerValue(&timer);
sdkDeleteTimer(&timer); // helper_time.h
class StopWatchInterface
{
public:
StopWatchInterface() {};
virtual ~StopWatchInterface() {}; public:
virtual void start() = ;
virtual void stop() = ;
virtual void reset() = ;
virtual float getTime() = ;// 获取计时(计时器不停)
virtual float getAverageTime() = ;
}; inline bool sdkCreateTimer(StopWatchInterface **timer_interface)
{
#if defined(WIN32) || defined(_WIN32) || defined(WIN64) || defined(_WIN64)
*timer_interface = (StopWatchInterface *)new StopWatchWin();
#else
*timer_interface = (StopWatchInterface *)new StopWatchLinux();
#endif
return (*timer_interface != NULL) ? true : false;
} inline bool sdkDeleteTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
{
delete *timer_interface;
*timer_interface = NULL;
}
return true;
} inline bool sdkStartTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
(*timer_interface)->start();
return true;
} inline bool sdkStopTimer(StopWatchInterface **timer_interface)
{
if (*timer_interface)
(*timer_interface)->stop();
return true;
} inline float sdkGetTimerValue(StopWatchInterface **timer_interface)
{
if (*timer_interface)
return (*timer_interface)->getTime();
else
return 0.0f;
}
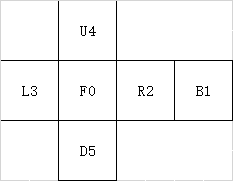
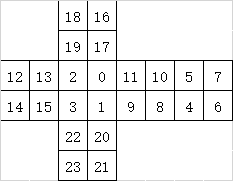
● 立方体纹理贴图。六个面分别为 x = 1 正面、x = -1 轴负面、y = 1 正面、y = -1 负面、z = 1 正面、x = -1 负面,对应前、后、右、左、上、下。按照线性下标 [0, width * width * 6 - 1] 顺序访问时,各元素存储位置如下图所示(width == 2 为例)。
0_Simple__simpleCubemapTexture的更多相关文章
随机推荐
- ElasticSearch—分页查询
ElasticSearch查询—分页查询详解 Elasticsearch中数据都存储在分片中,当执行搜索时每个分片独立搜索后,数据再经过整合返回.那么,如何实现分页查询呢? 按照一般的查询流程来说,如 ...
- LeetCode-Microsoft-Remove K Digits
Given a non-negative integer num represented as a string, remove k digits from the number so that th ...
- 不用webservice wcf提供服务,用Rest更轻量
从2005年开始就开始有基于服务的开发方式,到08年时候 微软和sun等公司都已经提供了很多基于服务的开发框架 . 微软 .net 平台的基于服务的框架主要有:.NET Remoting.webser ...
- day31 python学习 并发编程之多进程理论部分
一 什么是进程 进程:正在进行的一个过程或者说一个任务.而负责执行任务则是cpu. 举例(单核+多道,实现多个进程的并发执行): 二 进程与程序的区别 程序仅仅只是一堆代码而已,而进程指的是程序的运行 ...
- dbt seed 以及base ephemeral使用
seed 可以方便的进行数据的导入,可以方便的进行不变数据(少量)以及测试数据的导入, base 设置为 ephemeral(暂态),这个同时也是官方最佳实践的建议 项目依赖的gitlab 数据可以参 ...
- 可靠的推送IM消息
一. 报文类型: 1.请求报文(request,后简称为为R): 2.应答报文(acknowledge,后简称为A): 3.通知报文(notify,后简称为N). R:客户端主动发送给服务器 ...
- Microsoft Dynamics CRM 2011 如何导入组织
一.首先备份数据库,还原数据库(前面SQL server 2008数据库的备份与还原(转)已经说明),这里就不说明了. 二.怎么删除组织? 先要在组织管理器里禁用组织,然后删除组织,再从数据库里删除. ...
- sysbench 0.5 基准测试
sysbench 介绍 SysBench是一个模块化的.跨平台.多线程基准测试工具,主要用于评估测试各种不同系统参数下的数据库负载情况.它主要包括以下几种方式的测试: cpu性能 磁盘io性能 调度程 ...
- 常用Web框架
1.Aliceui Aliceui是支付宝的样式解决方案,是一套精选的基于 spm 生态圈的样式模块集合,是 Arale 的子集,也是一套模块化的样式命名和组织规范,是写 CSS 的更好方式. git ...
- REDHAT中的iptable设置(nginx或者apache80端口访问不了解决)转 亲测
来自:http://johnnychenjun.blog.163.com/blog/static/137493406201010284598972/ 查看当前防火墙里的状态:#/etc/init.d/ ...