【Hector slam】A Flexible and Scalable SLAM System with Full 3D Motion Estimation
作者总结了SLAM前端和后端的区别
While SLAM frontends are used to estimate robot movement online in real-time,
the backend is used to perform optimization of the pose graph given constraints
between poses that have been generated before using the frontend.
前端 用来在线实时估计机器人运动,
后端用来优化位姿
而这篇文章服务于SLAM前端,并不提供后端优化。可以估计6DOF呢。
our system has to estimate the full 6DOF state consisting of translation and rotation of the platform.
To achieve this,the system consists of two major components.
A navigation filter fuses information from the inertial measurement unit
and other available sensors to form a consistent 3D solution,
while a 2D SLAM system is used to provide position and
heading information within the ground plane.
******** 我关注的重点在2D slam
数据点的预处理是必不可少的
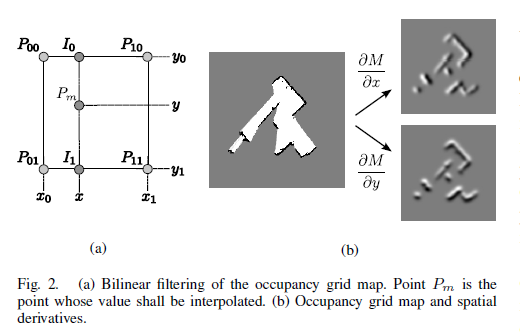
A 然后建图:双线性滤波估计占据栅格的概率
B 帧间匹配:高斯牛顿方法,不需要建立点之间的关系
Our approach is based on optimization of the alignment of beam endpoints with the map learnt so far.
The basic idea using a Gauss-Newton approach is inspired by work in computer vision
[19 An iterative image registration technique with an application to stereo vision (darpa)].
Using this approach, there is no need for a data association search between beam endpoints or an exhaustive pose search.
As scans get aligned with the existing map, the matching is implicitly performed with all preceding scans
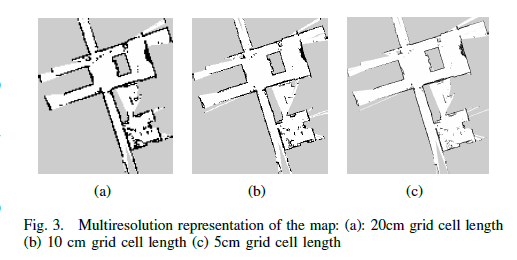
C 多分辨率地图表示
像图像金字塔一样,帧匹配的时候,从最粗的地图开始,结果作为下一精度匹配的初始估计。
The scan alignment process is started at the coarsest map level, with the resulting
estimated pose getting used as the start estimate for the next level
【Hector slam】A Flexible and Scalable SLAM System with Full 3D Motion Estimation的更多相关文章
- 论文阅读:hector_slam: A Flexible and Scalable SLAM System with Full 3D Motion Estimation.
参考:<A Flexible and Scalable SLAM System with Full 3D Motion Estimation.> 该论文是ROS中hector_mappin ...
- 【技巧总结】Penetration Test Engineer[5]-Operating System Security(SQL Server、MySQL提权)
4.数据库安全基础 4.1.MSSQL 数据库角色权限 sysadmin:执行SQL Server中的任何动作 db_owner:可以执行数据库中技术所有动作的用户 public:数据库的每个合法用户 ...
- 【AR实验室】mulberryAR : ORBSLAM2+VVSION
本文转载请注明出处 —— polobymulberry-博客园 0x00 - 前言 mulberryAR是我业余时间弄的一个AR引擎,目前主要支持单目视觉SLAM+3D渲染,并且支持iOS端,但是该引 ...
- 【Jquery mobile】动态加载ListView 转
[Jquery mobile]动态加载ListView 分类: Jquery Mobile2011-12-01 09:04 13984人阅读 评论(1) 收藏 举报 jquerylistviewmob ...
- 【Spring实战】----开篇(包含系列目录链接)
[Spring实战]----开篇(包含系列目录链接) 置顶2016年11月10日 11:12:56 阅读数:3617 终于还是要对Spring进行解剖,接下来Spring实战篇系列会以应用了Sprin ...
- zz【清华NLP】图神经网络GNN论文分门别类,16大应用200+篇论文最新推荐
[清华NLP]图神经网络GNN论文分门别类,16大应用200+篇论文最新推荐 图神经网络研究成为当前深度学习领域的热点.最近,清华大学NLP课题组Jie Zhou, Ganqu Cui, Zhengy ...
- 【论文翻译】NIN层论文中英对照翻译--(Network In Network)
[论文翻译]NIN层论文中英对照翻译--(Network In Network) [开始时间]2018.09.27 [完成时间]2018.10.03 [论文翻译]NIN层论文中英对照翻译--(Netw ...
- 【Flutter实战】定位装饰权重组件及柱状图案例
老孟导读:Flutter中有这么一类组件,用于定位.装饰.控制子组件,比如 Container (定位.装饰).Expanded (扩展).SizedBox (固定尺寸).AspectRatio (宽 ...
- 【.net 深呼吸】细说CodeDom(1):结构大观
CodeDom 是啥东东?Html Dom听过吧,XML Dom听过吧.DOM一般可翻译为 文档对象模型,那 Code + DOM呢,自然是指代码文档模型了.如果你从来没接触过 CodeDom,你大概 ...
随机推荐
- c#-SimHash匹配相似-算法
使用场景:Google 的 simhash 算法 //通过大量测试,simhash用于比较大文本,比如500字以上效果都还蛮好,距离小于3的基本都是相似,误判率也比较低. //从我的经验,如果我们假定 ...
- Mount DVD on CentOS
Mount DVD on CentOS need to mount CD/DVD on CentOS Temporarily or Permanently? Here’s the Process Us ...
- 安装 whmcs
1.下载下来后(自己百度网盘),用scp 上传, 在网站能访问的地方新建目录,例如 whmcs 目录,解压到内 2.网站访问 http://ip/whmcs/index.php 提示需要安装 ionc ...
- jeesz源码下载
大型分布式企业架构 jeesz,百度去搜索jeesz
- 如何使用查尔斯代理抓取https请求
首先 查尔斯代理是一个很不错的抓包工具 有适合各种系统的版本 最近http的请求几乎铺天盖地的已经变为了https了 其中的好处有很多 更加安全(http://www.cnblogs.com/lo ...
- 使用JDOM操作XML
JDOM介绍 JDOM是使用Java语言编写的,用于读写及操作XML的一套组件,Jdom同时具有DOM修改文件的优点和SAX读取快速的优点. JDOM的使用 首先下载JDOM的JAR包,本文使用的是j ...
- 关于yuv格式
首先,内存分布 1:YUV420 (1):I420: YYYYYYYY UU VV =>YUV420P (2): ...
- GDB的深入研究
GDB的深入研究 一.GDB代码调试 (一)GDB调试实例 在终端中编译一个示例C语言小程序,保存为文件 gdblianxi.c 中,用GCC编译. 在上面的命令行中,使用-o参数指定了编译生成的可执 ...
- 转载:一幅图弄清DFT与DTFT,DFS的关系
转载:http://www.cnblogs.com/BitArt/archive/2012/11/24/2786390.html 很多同学学习了数字信号处理之后,被里面的几个名词搞的晕头转向,比如DF ...
- 伪共享和缓存行填充,从Java 6, Java 7 到Java 8
关于伪共享的文章已经很多了,对于多线程编程来说,特别是多线程处理列表和数组的时候,要非常注意伪共享的问题.否则不仅无法发挥多线程的优势,还可能比单线程性能还差.随着JAVA版本的更新,再各个版本上减少 ...