Win32编程之控制线程
0x01. 如何让线程停下来
让自己停下来:
Sleep() 函数
当程序执行到某段代码的时候可以使用sleep() 函数进行暂停
使用sleep()函数挂起的时候会自动恢复过来的
让别人停下来:
SuspendThread() 函数
使用这个函数挂起,也就是阻塞的时候,必须使用ResumeThread()函数来恢复
线程恢复:
ResumeThread() 函数
我们先讲Sleep函数:
以上章代码为例子:
#include <stdio.h>
#include <windows.h>
DWORD WINAPI ThreadProc(LPVOID lpParameter)
{
for (int i = 0; i < 100; i++)
{
Sleep(500);
printf("++++++++++++++ %d \n", i);
}
return 0;
}
int main()
{
int n;
n = 10;
HANDLE hThread = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
Sleep(5000); //main函数这个线程睡眠五秒
SuspendThread(hThread); //挂起线程,也就是阻塞状态
Sleep(5000); //再睡眠5秒
ResumeThread(hThread); //恢复线程
CloseHandle(hThread); //关闭线程句柄
getchar();
return 0;
}
注意:关闭线程的话要放在下面,不然无法控制。因为线程是时间型,你执行之后关闭句柄,线程还是在执行,但是执行完代码之后就关闭了
然而需要注意的是线程挂起几次,就需要使用函数ResumeThread()恢复
int main()
{
int n;
n = 10;
HANDLE hThread = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
Sleep(5000); //main函数这个线程睡眠五秒
SuspendThread(hThread); //挂起线程,也就是阻塞状态
SuspendThread(hThread);
Sleep(5000);
ResumeThread(hThread);
ResumeThread(hThread);
CloseHandle(hThread);
getchar();
return 0;
}
sleep的话睡眠之后是会自动启动,使用SuspendThread()函数是需要另外ResumeThread()恢复的
当线程执行做另外一件事的时候,怎么知道线程执行没执行完毕呢?
需要用到两个函数
1、WaitForSingleObject()
2、WaitForMultipleObjects()

第一个参数是句柄
dwMilliseconds : 等待的最长时间,时间终了,即使handle尚未成为激发状态,此函数还是要返回。
此值可以是0(代表立即返回),也可以是INFINITE(代表无穷等待)。

可以看出它一直在不断的跑,直到线程发生变化,这个函数就往下走了,我们接下来可以看看是不是把线程都执行完了,才打印那段话
#include <stdio.h>
#include <windows.h>
DWORD WINAPI ThreadProc(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 0;
}
int main()
{
int n;
n = 10;
HANDLE hThread[2];
hThread[0] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
hThread[1] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
WaitForSingleObject(hThread, INFINITE);
printf("线程执行完毕 \n");
//Sleep(5000); //main函数这个线程睡眠五秒
//SuspendThread(hThread); //挂起线程,也就是阻塞状态
//Sleep(5000);
//ResumeThread(hThread);
CloseHandle(hThread);
getchar();
return 0;
}
再次修改一下代码,再创建一个线程,线程是可以同一段代码,但是它们是两个堆栈,互相没关系的
当这两个线程执行完毕的时候,我们再执行 线程执行完毕 这段代码
那么这边就用到了新的 API,也就是WaitForMultipleObjects()

DWORD WaitForMultipleObjects(
DWORD nCount, //等几个内核对象
const HANDLE *lpHandles, //内核对象数组
BOOL bWaitAll, //等待模式
DWORD dwMilliseconds //等待时间,想一直等待的话 INFINITE
);
等待模式是什么?
可以指定所有等待对象状态都发生变更的时候才返回,也可以指定任何一个对象发生变更就返回
True:这个函数当所有对象都发生改变,才返回
补充
DWORD WINAPI ThreadProc(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 0;
}
比如说这边,为什么会有个DWORD,因为我们可以看这个线程返回值,执行成功的话返回什么,执行失败的话返回什么
具体可以根据项目需求来定
这时候可以使用另外一个函数,GetExitCodeThread()函数

第一个就是Handle,也就是句柄,我们把刚刚的两个线程句柄放进去就行了
第二个参数就是接收的参数,IN 是输入;_OUT_是输出,这时候我们可以定义两个变量来接收这个参数
完整代码如下:
#include <stdio.h>
#include <windows.h>
DWORD WINAPI ThreadProc(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 0;
}
DWORD WINAPI ThreadProc2(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 1;
}
int main()
{
HANDLE arrhThread[2];
DWORD dwResult1;
DWORD dwResult2;
arrhThread[0] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
arrhThread[1] = CreateThread(NULL, 0, ThreadProc2, NULL, 0, NULL);
WaitForMultipleObjects(2, arrhThread, TRUE, INFINITE);
printf("线程执行完毕 \n");
GetExitCodeThread(arrhThread[0], &dwResult1);
GetExitCodeThread(arrhThread[1], &dwResult2);
CloseHandle(arrhThread[0]);
CloseHandle(arrhThread[1]);
getchar();
return 0;
}
小Tips:
如果你当前的电脑只有一个核,当你的A线程跑一半,切换到了B线程,A线程怎么办?
因为程序跑的时候需要一堆寄存器,比如eax,ebx,ecx,edx ,那A线程要不要保留呢?
其实丢不了,每个线程都有一个结构体,当自己被切换的时候,会把当前运行情况,寄存器里面的值存到结构体
这个结构体叫CONTEXT;
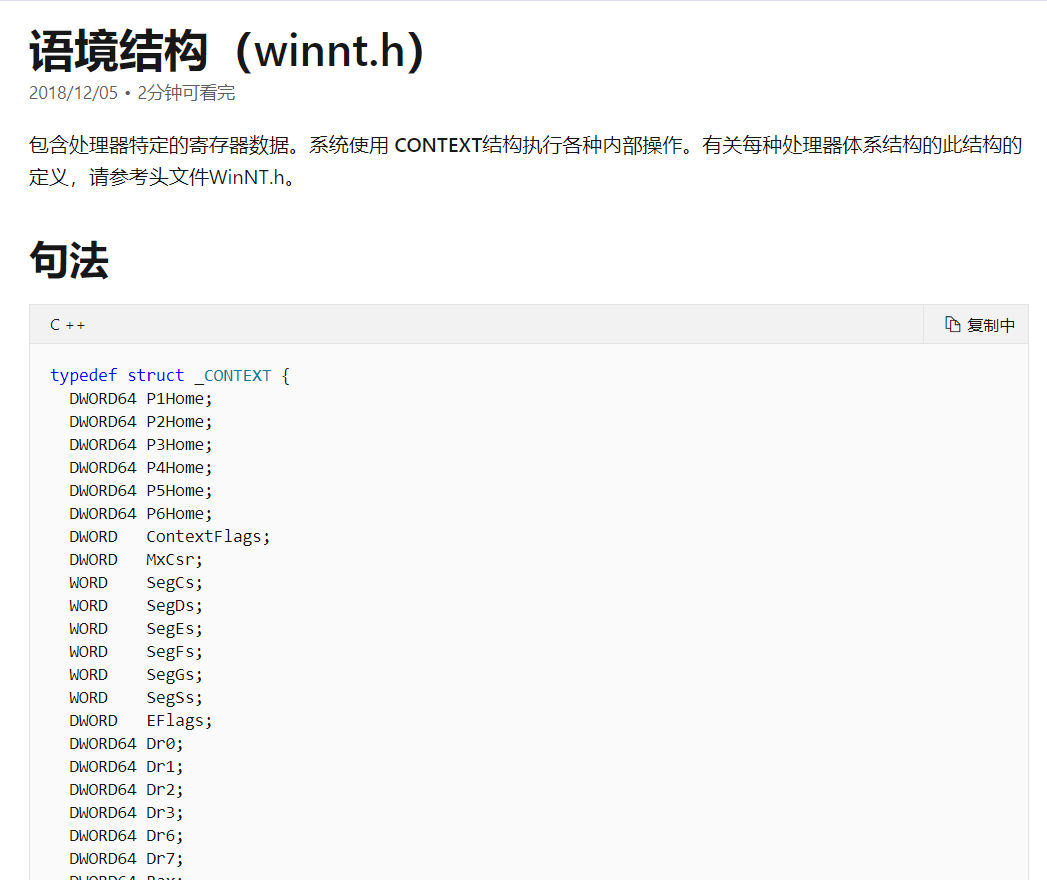
然后我们跟进去,可以发现一大堆的寄存器
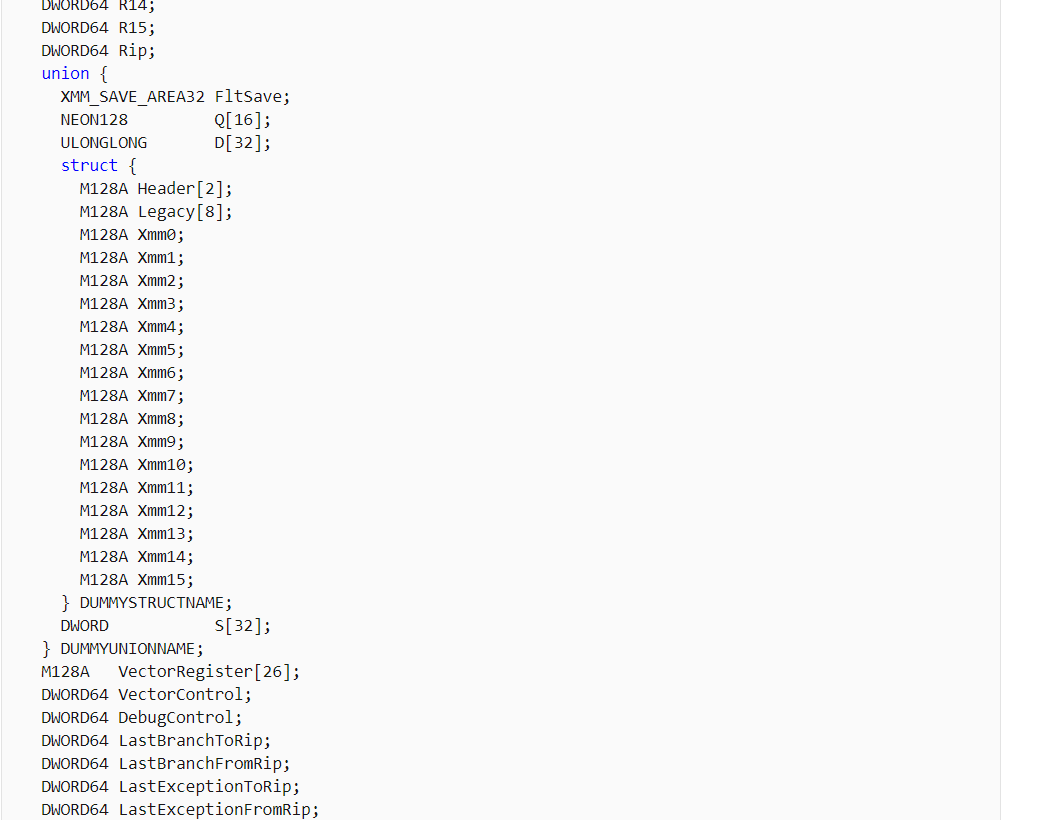
接下来我们就可以写代码,体会一下CONTEXT;
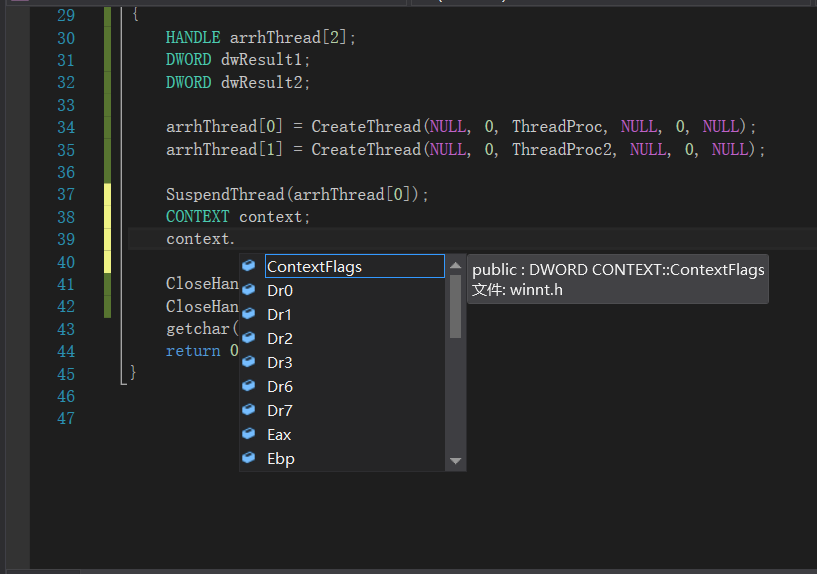
因为这个结构体里面好多寄存器,所以微软给了个方便的方法,那就是一段一段的获取

比如我们想要这一段的寄存器
context.ContextFlags = CONTEXT_INTEGER;
我们可以这样写,就更方便了,想看其他段就把 CONTEXT_INTEGER 改成那个段对应的参数
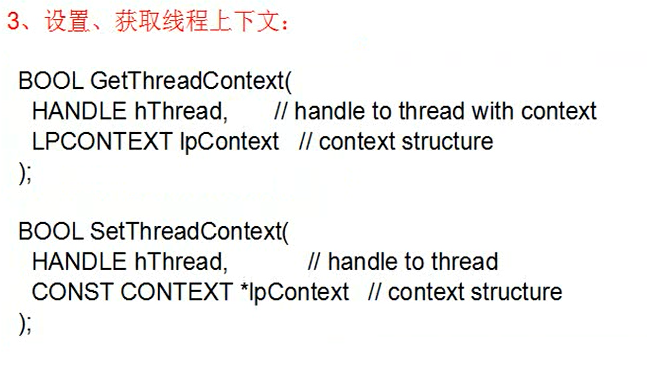
设置、获取线程上下文
通过上面我们已经赋好值了,代码如下:
#include <stdio.h>
#include <windows.h>
DWORD WINAPI ThreadProc(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 0;
}
DWORD WINAPI ThreadProc2(LPVOID lpParameter)
{
for (int i = 0; i < 30; i++)
{
Sleep(50);
printf("++++++++++++++ %d \n", i);
}
return 1;
}
int main()
{
HANDLE arrhThread[2];
DWORD dwResult1;
DWORD dwResult2;
arrhThread[0] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
arrhThread[1] = CreateThread(NULL, 0, ThreadProc2, NULL, 0, NULL);
SuspendThread(arrhThread[0]);
CONTEXT context;
context.ContextFlags = CONTEXT_INTEGER;
CloseHandle(arrhThread[0]);
CloseHandle(arrhThread[1]);
getchar();
return 0;
}
我们需要用到新的API来获取上下文
1、GetThreadContext() //获取值
BOOL WINAPI GetThreadContext(
_In_ HANDLE hThread, //线程句柄
_Inout_ LPCONTEXT lpContext //指针
);
2、SetThreadContext() //设置修改值
BOOL WINAPI SetThreadContext(
_In_ HANDLE hThread,
_In_ CONST CONTEXT * lpContext
);
int main()
{
HANDLE arrhThread[2];
DWORD dwResult1;
DWORD dwResult2;
arrhThread[0] = CreateThread(NULL, 0, ThreadProc, NULL, 0, NULL);
//arrhThread[1] = CreateThread(NULL, 0, ThreadProc2, NULL, 0, NULL);
SuspendThread(arrhThread[0]);
CONTEXT context;
context.ContextFlags = CONTEXT_INTEGER;
GetThreadContext(arrhThread[0], &context);
printf("%#x %#x\n", context.Eax, context.Ebx);
ResumeThread(arrhThread[0]);
CloseHandle(arrhThread[0]);
//CloseHandle(arrhThread[1]);
getchar();
return 0;
}
我们获取的话也可以修改,但是我们就打印一下就可以了
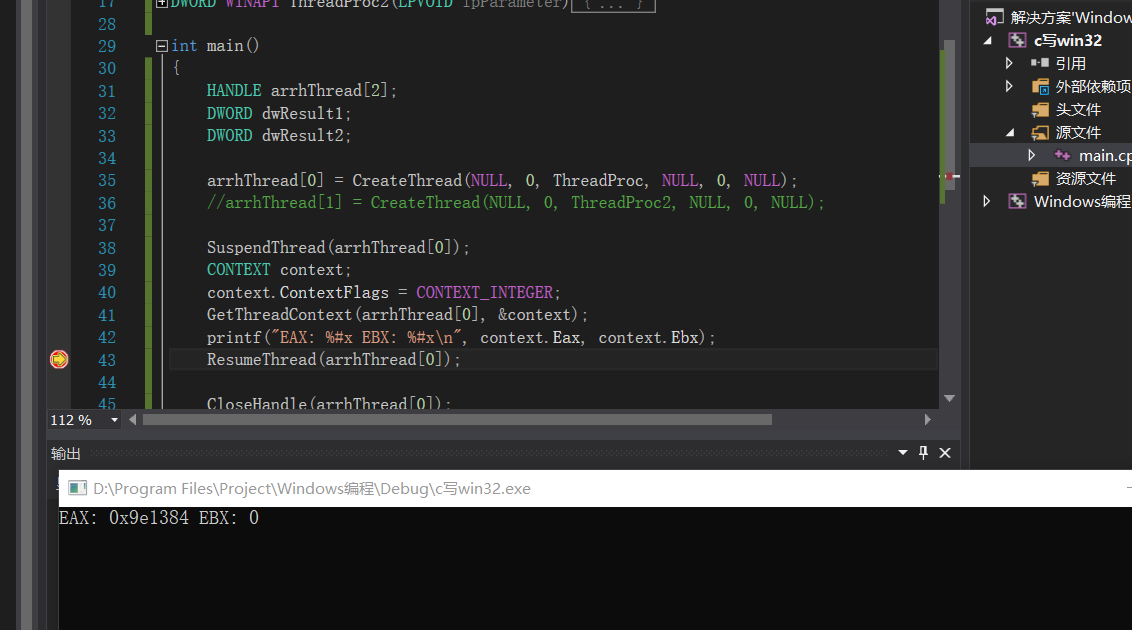
成功得到了寄存器的值
这时候就可以知道为什么一个核也可以跑那么快了,因为线程被切换会把寄存器数据存入结构体,当个再次启用的时候
再把结构体的值取出来,放到当前CPU的寄存器里
总结:

Win32编程之控制线程的更多相关文章
- (十) 一起学 Unix 环境高级编程 (APUE) 之 线程控制
. . . . . 目录 (一) 一起学 Unix 环境高级编程 (APUE) 之 标准IO (二) 一起学 Unix 环境高级编程 (APUE) 之 文件 IO (三) 一起学 Unix 环境高级编 ...
- Unix环境高级编程(十二)线程控制
本章介绍了一个进程中多个线程之间如何保持数据的似有性及进程的系统调用如何与线程进行交互. 1.线程限制: Single Unix定义了一线线程操作的限制,和其他的限制一样,可以通过sysconf来查询 ...
- (九) 一起学 Unix 环境高级编程 (APUE) 之 线程
. . . . . 目录 (一) 一起学 Unix 环境高级编程 (APUE) 之 标准IO (二) 一起学 Unix 环境高级编程 (APUE) 之 文件 IO (三) 一起学 Unix 环境高级编 ...
- win32编程简介
win32编程简介 复习Win32整理下知识. 为什么学习win32? 我们要编写windos程序.都离不开API. 也就是我们所说的win32程序. 所以学好win32是你能不能再windows下编 ...
- Java并发编程:Java线程池核心ThreadPoolExecutor的使用和原理分析
目录 引出线程池 Executor框架 ThreadPoolExecutor详解 构造函数 重要的变量 线程池执行流程 任务队列workQueue 任务拒绝策略 线程池的关闭 ThreadPoolEx ...
- GPU编程自学5 —— 线程协作
深度学习的兴起,使得多线程以及GPU编程逐渐成为算法工程师无法规避的问题.这里主要记录自己的GPU自学历程. 目录 <GPU编程自学1 -- 引言> <GPU编程自学2 -- CUD ...
- ROS Learning-028 (提高篇-006 A Mobile Base-04) 控制移动平台 --- (Python编程)控制虚拟机器人的移动(不精确的制定目标位置)
ROS 提高篇 之 A Mobile Base-04 - 控制移动平台 - (Python编程)控制虚拟机器人的移动(不精确的制定目标位置) 我使用的虚拟机软件:VMware Workstation ...
- Python学习笔记整理总结【网络编程】【线程/进程/协程/IO多路模型/select/poll/epoll/selector】
一.socket(单链接) 1.socket:应用层与TCP/IP协议族通信的中间软件抽象层,它是一组接口.在设计模式中,Socket其实就是一个门面模式,它把复杂的TCP/IP协议族隐藏在Socke ...
- Java并发编程系列-(2) 线程的并发工具类
2.线程的并发工具类 2.1 Fork-Join JDK 7中引入了fork-join框架,专门来解决计算密集型的任务.可以将一个大任务,拆分成若干个小任务,如下图所示: Fork-Join框架利用了 ...
随机推荐
- 利用Z.Expressions.Eval表达式求值
Z.Expression.Eval是一个开源的(OpenSource),可扩展的(Extensible),超轻量级(Super lightweight)的公式化语言解析执行工具包. 使用方法:1.从n ...
- Pycharm默认输入状态是insert状态,选中文字无法直接输入替换或删除
最近在学习Python,使用pycharm的时候,我的光标处于加粗状态,也就是编程软件经常出现的insert插入编辑模式,我就点击了一下insert按键,退出了这个模式,但是我每次打开都是会处于这种模 ...
- 从 ES6 高阶箭头函数理解函数柯里化
前言:第一次看到多个连续箭头函数是在一个 react 项目中,然鹅确认了下眼神,并不是对的人,因为看得一脸懵逼.em......于是开始各种搜索,先是知道了多个连续箭头函数就是 es6 的多次柯里化的 ...
- Actor:人生如戏全靠演技--“三维度”逻辑编程语言的设计(3)
在上一篇介绍了逻辑编程的作用,介绍了逻辑编程中的一些概念,包括逻辑程序的结构:事实.规则和问题:知识的表达方式:谓词演算.产生式规则,以及这些概念与三维度(角色+场景+时间)理论的契合关系,正式提出了 ...
- Python-local variable 'raw_password' referenced before assignment
where? 执行Python程序的时候,报这个错 why? 变量作用域问题,在分支中定义的变量,当满足条件的时候则可以正确得到变量,当不满足条件的时候则报这个错 way? 把变量从分支中抽离到分支上 ...
- CS:APP配套实验 Data Lab
刚刚完成注册博客,想写一篇随笔,方便以后自己回顾.如果恰好也能帮助到你,是我的荣幸. 这次随笔是记载我的计算机系统(CS:APP,Computer Systems:A Programer's Pers ...
- mysql-16-variables
#变量 /* 系统变量: 全局变量 会话变量 自定义变量: 用户变量 局部变量 */ # 一.系统变量 #由系统提供,属于服务器层面 #1.查看所有的系统变量 show global variable ...
- obj2opengl:转换OBJ 3D模型到iPhone OpenGL ES兼容的数组中
原文如下:obj2opengl: convert obj 3D models to arrays compatible with iPhone OpenGL ES obj2opengl在GitHub中 ...
- 实验 3:Mininet 实验——测量路径的损耗率
一.实验目的 在实验 2 的基础上进一步熟悉 Mininet 自定义拓扑脚本,以及与损耗率相关的设定;初步了解 Mininet 安装时自带的 POX 控制器脚本编写,测试路径损耗率. 二.实验任务 h ...
- matlab中repmat函数的用法
转载:https://blog.csdn.net/facetosea1/article/details/83573859 B = repmat(A,m,n)B = repmat(A,[m n])B = ...