SAMP论文学习



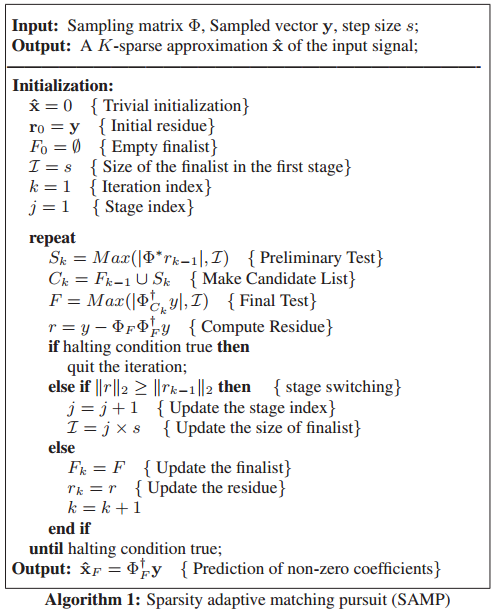



function [xr, iter_num] =SAMP(y, Phi, step_size, sigma)
% SAMP: Sparsity Adaptive Matching Pursuit algoritm for compressed sensing.
% For theoretical analysis, please refer to the paper :
% Thong. T. Do, Lu Gan and Trac D. Tran ,"Sparsity Adaptive Matching
% Purusit for practical compressed sensing" available at http://dsp.ece.rice.edu/cs
% Written by Thong Do(thongdo@jhu.edu)
% Updated on July, 26th 2008
% parameter usage:
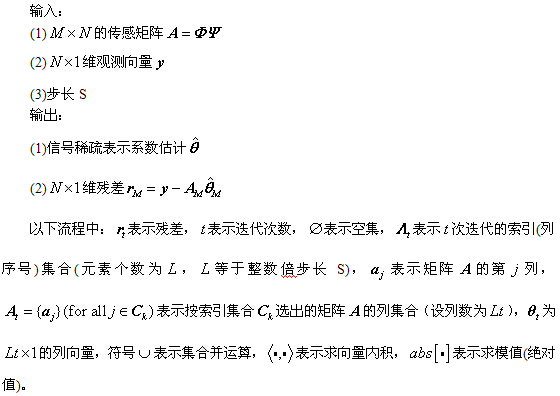
% y: Mx1 observation vector
% Phi: MxN measurement matrix
% step_size: any positive integer value not larger than sparsity
% sigma: noise energy when sensing
% xr: reconstructed sparse signal
% iter_num: number of iterations
% Initialization
iter_num = 0;
actset_size = step_size;
active_set = [];
res = y;
stg_idx = 1; % stage index
while (norm(res)>sigma)
% candidate list
[val, idx] = sort(abs(Phi'*res), 'descend');
candidate_set = union(active_set, idx(1:actset_size));
% finalist
[val, idx] = sort(abs(pinv(Phi(:,candidate_set))*y), 'descend');
new_active_set = candidate_set(idx(1:actset_size));
new_res = y-Phi(:,new_active_set)*pinv(Phi(:,new_active_set))*y;
if (norm(new_res) >= norm(res))
% shift into a new stage
stg_idx = stg_idx + 1;
actset_size = stg_idx*step_size; else
% update residual and active set
res = new_res;
active_set= new_active_set; end iter_num = iter_num +1; %while的次数
end % loop
% reconstruction
N = size(Phi,2);
xr = zeros(N,1);
xr_active_set = pinv(Phi(:,active_set))*y;
xr(active_set) = xr_active_set;
SAMP论文学习的更多相关文章
- Faster RCNN论文学习
Faster R-CNN在Fast R-CNN的基础上的改进就是不再使用选择性搜索方法来提取框,效率慢,而是使用RPN网络来取代选择性搜索方法,不仅提高了速度,精确度也更高了 Faster R-CNN ...
- 《Explaining and harnessing adversarial examples》 论文学习报告
<Explaining and harnessing adversarial examples> 论文学习报告 组员:裴建新 赖妍菱 周子玉 2020-03-27 1 背景 Sz ...
- 论文学习笔记 - 高光谱 和 LiDAR 融合分类合集
A³CLNN: Spatial, Spectral and Multiscale Attention ConvLSTM Neural Network for Multisource Remote Se ...
- Apache Calcite 论文学习笔记
特别声明:本文来源于掘金,"预留"发表的[Apache Calcite 论文学习笔记](https://juejin.im/post/5d2ed6a96fb9a07eea32a6f ...
- GoogleNet:inceptionV3论文学习
Rethinking the Inception Architecture for Computer Vision 论文地址:https://arxiv.org/abs/1512.00567 Abst ...
- IEEE Trans 2008 Gradient Pursuits论文学习
之前所学习的论文中求解稀疏解的时候一般采用的都是最小二乘方法进行计算,为了降低计算复杂度和减少内存,这篇论文梯度追踪,属于贪婪算法中一种.主要为三种:梯度(gradient).共轭梯度(conjuga ...
- Raft论文学习笔记
先附上论文链接 https://pdos.csail.mit.edu/6.824/papers/raft-extended.pdf 最近在自学MIT的6.824分布式课程,找到两个比较好的githu ...
- 论文学习-系统评估卷积神经网络各项超参数设计的影响-Systematic evaluation of CNN advances on the ImageNet
博客:blog.shinelee.me | 博客园 | CSDN 写在前面 论文状态:Published in CVIU Volume 161 Issue C, August 2017 论文地址:ht ...
- 论文学习笔记--无缺陷样本产品表面缺陷检测 A Surface Defect Detection Method Based on Positive Samples
文章下载地址:A Surface Defect Detection Method Based on Positive Samples 第一部分 论文中文翻译 摘要:基于机器视觉的表面缺陷检测和分类可 ...
随机推荐
- [vxlan] 一 Why VXLAN
想了解一个事物/概念,最好的办法是知道它是为什么出现的,为了解决那些问题而出现.这里,就用这种方式来学习一下VXLAN VXLAN (Virtual eXtensible Local Area Net ...
- Android拍照、摄像方向旋转的问题 代码具体解释
近期做了个拍照.摄像的应用.遇到了拍照.摄像的图像相对于现实.翻转了90度.原因:相机这个硬件的角度是横屏的角度,所以会出现都是横屏的. 1.照相.摄影预览图像的正确角度显 示: public sta ...
- 改动Android启动画面
一.Android的启动步骤 1.启动Linux 2.载入Android 3.显示Android桌面 二.分析 Android载入开机动画的源代码文件是: /opt/android4.3/framew ...
- thinkphp3.2.3 数据库写入add 方法的一些问题。
最近在做项目中遇到的一个数据操作add()方法,在不开启debug的模式下会漏掉一些字段没写入数据库. 当时并不知道是这个原因,明明在开发的时候都是没问题的,怎么突然出现这个问题,找了好久都没有头绪, ...
- 【iOS系列】-UITableViewCell的展开与收缩的实现思路
UITableViewCell的展开与收缩的实现思路 现在项目中很多地方都会用到,所以我这里介绍一种可以复用的思路,这与文章后面的Swift的实现思路不同,具体大家可自行对比. Demo项目地址 开始 ...
- 用UltraEdit比較两个文件
在编写代码的过程中,经常碰到两个文件之间的逐行比較.特别是新代码与源码之间的文字比較,这里介绍用UltraEdit实现新代码与源码之间的比較方法. //源码:Bearing.mac FINISH /C ...
- Vue实例及生命周期
1,Vue实例生命周期. 有时候,我们需要在实例创建过程中进行一些初始化的工作,以帮助我们完成项目中更复杂更丰富的需求,开发,针对这样的需求,Vue提供给我们一系列的钩子函数 2,Vue生命周期的阶段 ...
- how to create modals with Bootstrap
In this tutorial you will learn how to create modals with Bootstrap. Creating Modals with Bootstrap ...
- LeetCode 7. Reverse Integer (JS)
Given a 32-bit signed integer, reverse digits of an integer. Example 1: Input: 123 Output: 321 Examp ...
- AnimatorCompatHelper clearInterpolator
supportLib 26.0.0+以上AnimatorCompatHelper类被移除 所以clearInterpolator(view)找不到 替换方案: TimeInterpolator mDe ...