基于SLAM系统建图仿真,完成定位仿真
基于SLAM系统完成建图仿真,详见之前的博客
参考链接
Part 1: 准备工作
navigation安装
sudo apt install ros-melodic-navigation
Part 2: 编写 amcl 相关 launch文件
查看并复制 amcl 模版
roscd amcl
gedit examples/amcl_diff.launch


mycar_ws/src/nav_demo/launch/nav04_amcl.launch
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<!-- set coordinate system: odom、map、base_link -->
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_footprint"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
编写 amcl 测试 launch文件
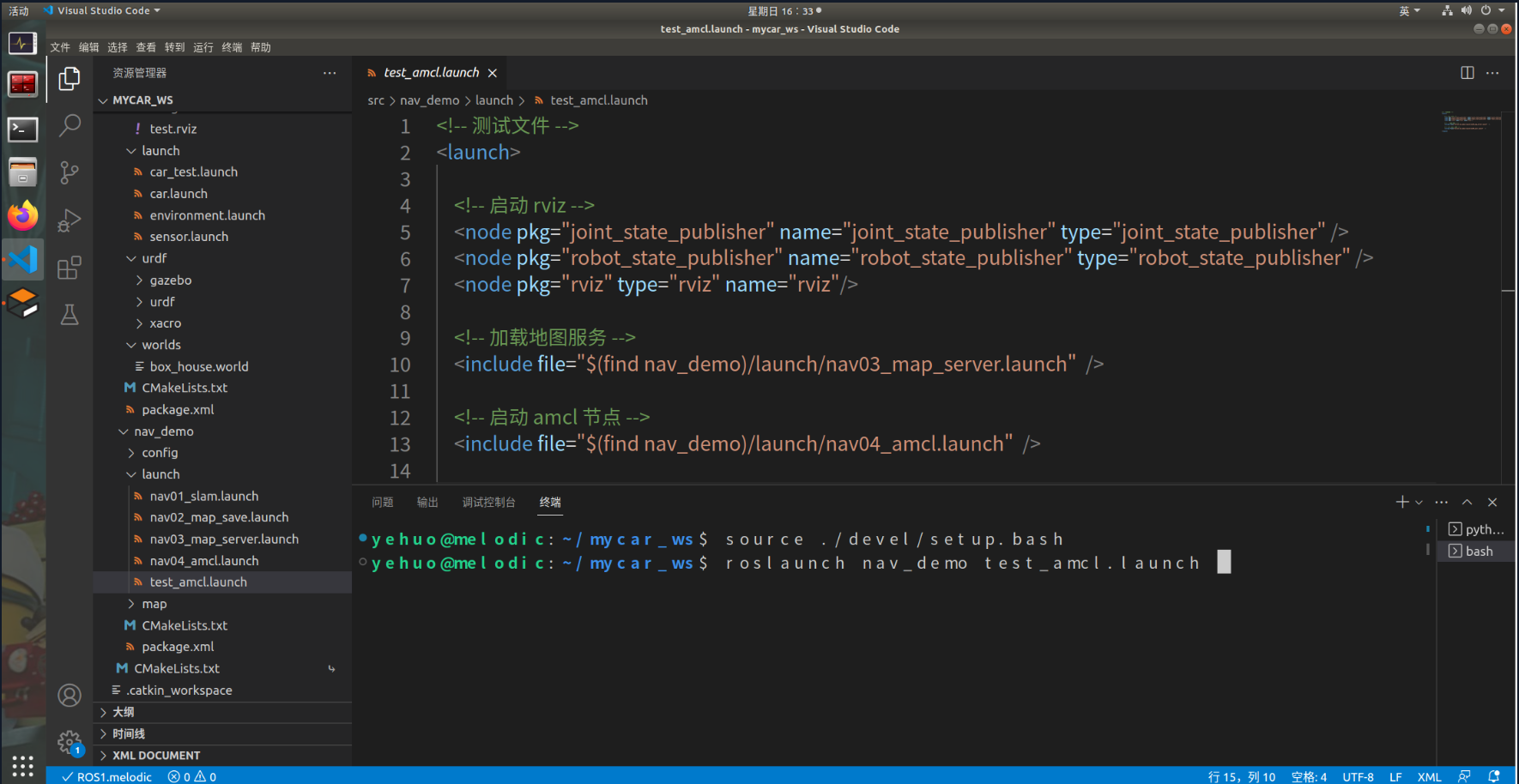
mycar_ws/src/nav_demo/launch/test_amcl.launch
<!-- 测试文件 -->
<launch>
<!-- 启动 rviz -->
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz"/>
<!-- 加载地图服务 -->
<include file="$(find nav_demo)/launch/nav03_map_server.launch" />
<!-- 启动 amcl 节点 -->
<include file="$(find nav_demo)/launch/nav04_amcl.launch" />
</launch>
Part 3: 执行 amcl
启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch
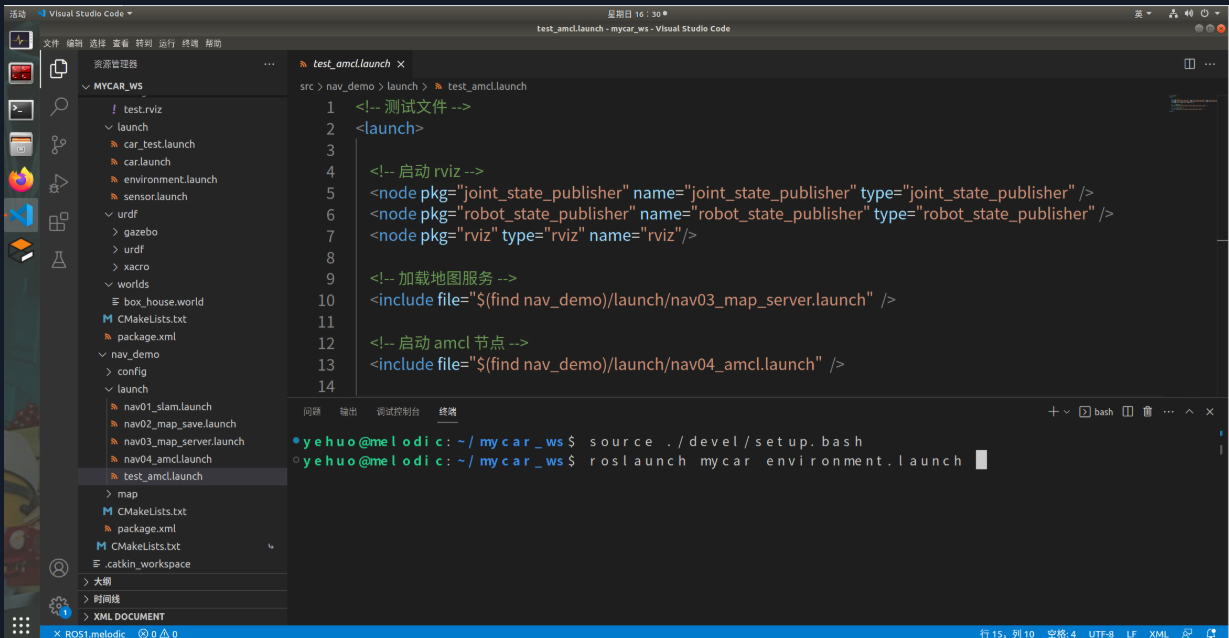
启动 amcl 测试 launch文件
source ./devel/setup.bash
roslaunch nav_demo test_amcl.launch


启动键盘控制节点
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5


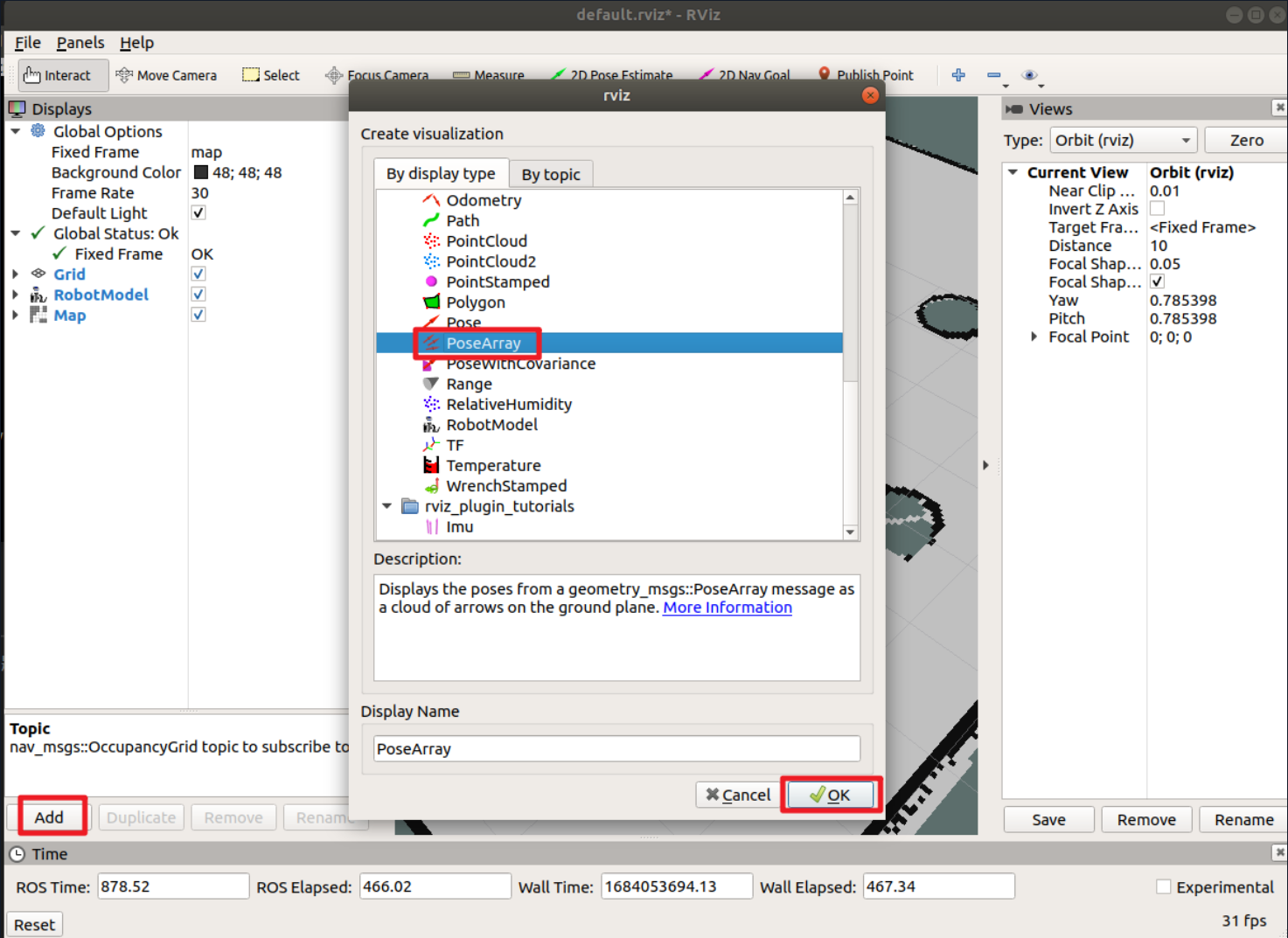
配置 rviz
RobotModel(加载机器人模型)

Map(显示SLAM构建的地图)

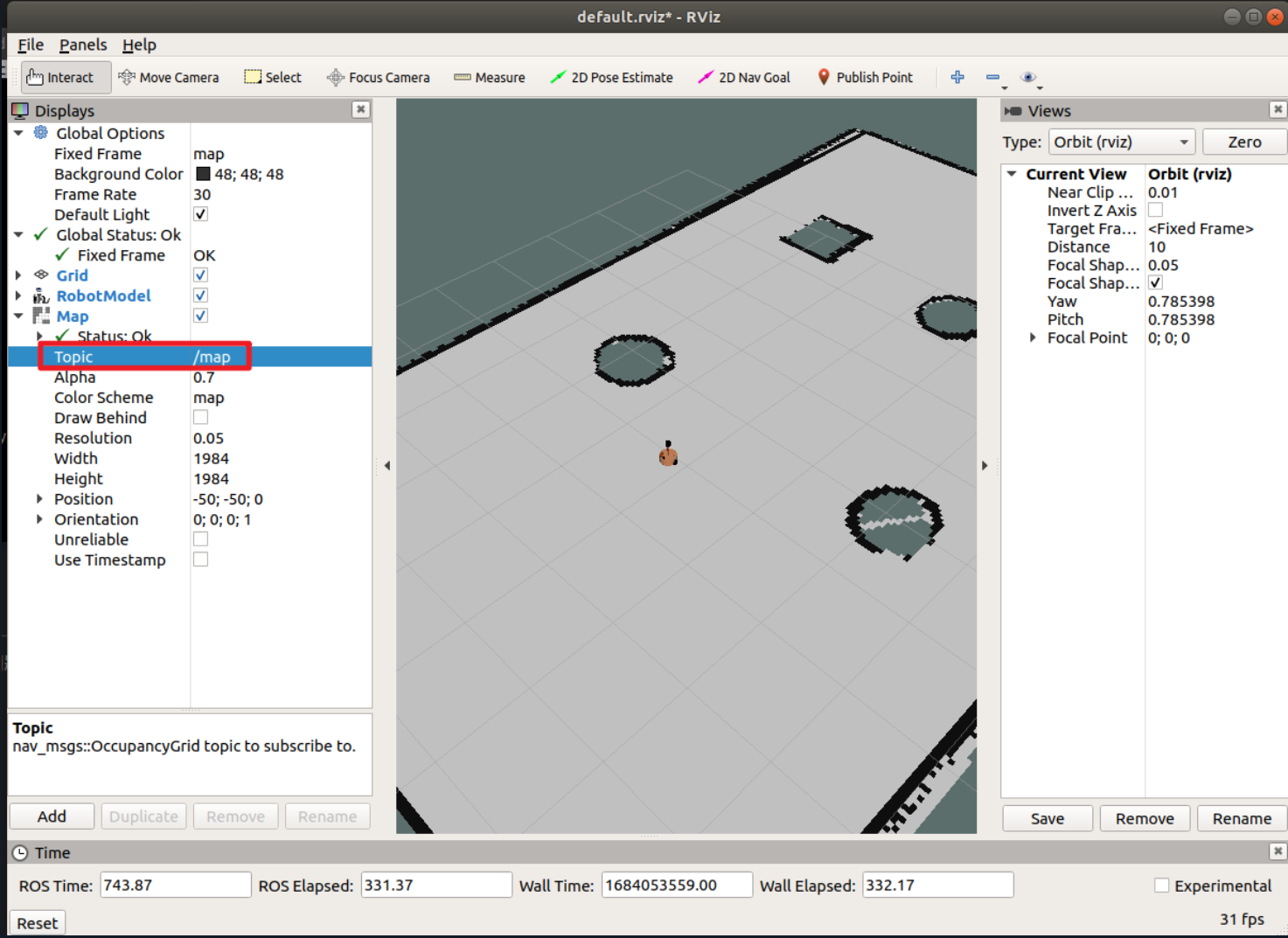
PoseArray(显示定位结果)
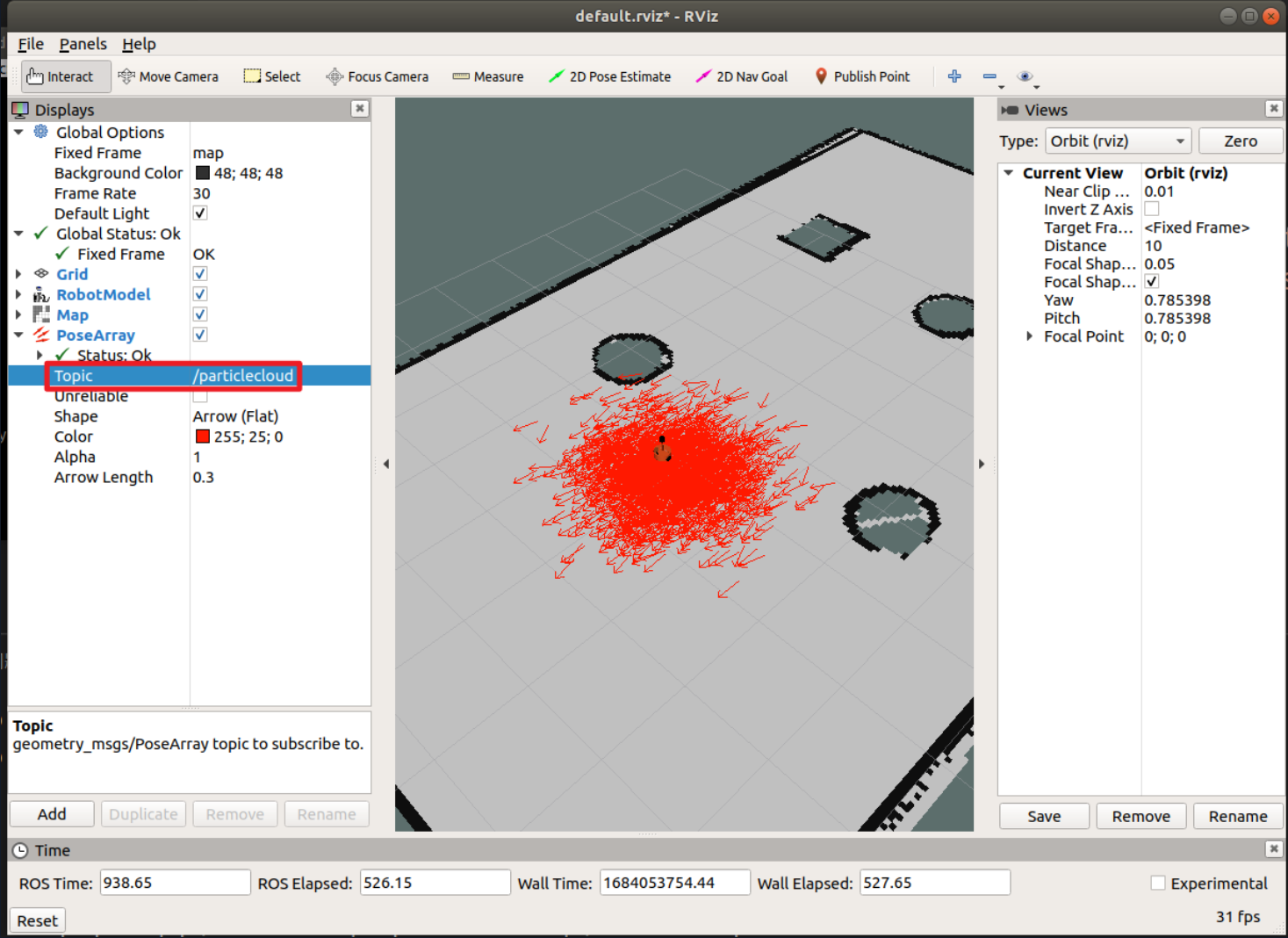
Part 4: 控制机器人运动,观察定位现象
调整至以下三个窗口均能观察到的布局,便于观看现象
通过键盘即可操控机器人运动

基于SLAM系统建图仿真,完成定位仿真的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- 基于ros2 dashing的建图导航探索
基于ros2 dashing的建图导航探索 1. 环境准备 安装ros2 dashing, 参考链接: https://index.ros.org/doc/ros2/Installation/Dash ...
- 一个基于深度学习回环检测模块的简单双目 SLAM 系统
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12634631.html 写在前面 最近在搞本科毕设,关于基于深度学 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- cartographer环境建立以及建图测试(详细级)
- 语义SLAM的数据关联和语义定位(一)
语义SLAM和多传感器融合是自动驾驶建图和定位部分比较热门的两种技术.语义SLAM中,语义信息的数据关联相较于特征点的数据关联有所不同.我们一般用特征描述子的相似性来匹配和关联不同图像中的特征点.特征 ...
- 开发一个基于 Android系统车载智能APP
很久之前就想做一个车载相关的app.需要实现如下功能: (1)每0.2秒更新一次当前车辆的最新速度值. (2)可控制性记录行驶里程. (3)不连接网络情况下获取当前车辆位置.如(北京市X区X路X号) ...
- DVB-C系统中QAM调制与解调仿真
本文简单记录一下自己学习<通信原理>的时候调试的一个仿真DVB-C(Cable,数字有线电视)系统中QAM调制和解调的程序.自己一直是研究"信源"方面的东西,所以对&q ...
- OverFeat:基于卷积网络的集成识别、定位与检测
摘要:我们提出了一个使用卷积网络进行分类.定位和检测的集成框架.我们展示了如何在ConvNet中有效地实现多尺度和滑动窗口方法.我们还介绍了一种新的深度学习方法,通过学习预测对象边界来定位.然后通过边 ...
- 基于MarkDown和Github图床以及SourceTree的一站式文章编辑和发布
标题: 基于MarkDown和Github图床以及SourceTree的一站式文章编辑和发布 作者: 梦幻之心星 sky-seeker@qq.com 标签: [MarkDown,Github,图床,S ...
随机推荐
- mac sublime text3-快捷键
cmd+n 新建页面 cmd+数字键 切换到对应页面 cmd+p 搜索跳转到对应页 cmd+w 关闭页面 cmd+j 合并一行 cmd+d 选中当前单词,继续敲可以选中多个 cmd+l 选中当前行 c ...
- jQuery---操作指南
功能代码(1)---通过Jquery来处理复选框 实现以下功能: 1:选中第一个复选框,那么下面所有的复选框都选中,去除选中第一个复选框,下面的都不选中 2:当点击全选按钮,上面足球.篮球.游泳.唱歌 ...
- RocketMQ(2)---实现分布式事务原理
分布式事务(3)-RocketMQ实现分布式事务原理 之前讲过有关分布式事务2PC.3PC.TCC的理论知识,博客地址: 1.分布式事务(1)---2PC和3PC原理 2.分布式事务(2)---TCC ...
- 【RocketMQ 消息中间件】RocketMQ篇之-消息存储 为什么性能高 CommitLog ConsumeQueue IndexFile 刷盘机制 同步 异步
RocketMQ篇之-消息存储 目录 RocketMQ篇之-消息存储 (前置)消息存储交互流程 (一)存储系统 1. 内存存储 2. 关系型数据库存储 3. 文件存储 (二)消息的存储和发送 1. 消 ...
- mysql 使用 ibd 恢复数据
分四步: 1. 按照ibd对应的表结构,创建新表: 2. 执行: ALTER TABLE `t_健忘就多写博客` DISCARD TABLESPACE; 或者 停止mysql服务后,删除对应的 xxx ...
- Fluttter基础组件Image的使用
1.图片 Image 图片组件( Image)是显示图像的组件, Image 组件有多种构造函数 : new Image:从 ImageProvider 获取图像 . new Image.asset: ...
- 接口性能测试---locust脚本编写(一)
本文分享自天翼云开发者社区<接口性能测试---locust脚本编写(一)>,作者:丁****乐 一.安装 locust是用python编写的一款开源接口性能测试工具,以python3为例, ...
- 『Python底层原理』--CPython如何运行Python代码
Python作为一种广泛使用的编程语言,其简洁的语法和强大的功能深受开发者喜爱. 然而,对于许多Python用户来说,CPython(Python的官方实现)的内部工作机制仍然是一个神秘的黑盒. 今天 ...
- linux--安装wine模拟器,可用作安装Windows的exe程序
sudo add-apt-repository ppa:ubuntu-wine/ppa sudo apt-get update sudo apt-get install wine1.7 安装完以后可以 ...
- 华盛顿大学-分布式系统课设-lab0
前言 无意间发现一个华盛顿大学分布式系统的课程实验,感觉课程组设计得非常用心.不同于一般实验仅仅给出若干测试样例并判断程序的输出是否正确,实验中的验证环节通过DFS搜索来遍历分布式系统可能的状态,以此 ...