OpenCV使用二维特征点(Features2D)和单映射(Homography)寻找已知物体
使用二维特征点(Features2D)和单映射(Homography)寻找已知物体
理论
代码
这个教程的源代码如下所示。你还可以从 以下链接下载到源代码
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/calib3d/calib3d.hpp" using namespace cv; void readme(); /** @function main */
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; } Mat img_object = imread( argv[1], CV_LOAD_IMAGE_GRAYSCALE );
Mat img_scene = imread( argv[2], CV_LOAD_IMAGE_GRAYSCALE ); if( !img_object.data || !img_scene.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_object, keypoints_scene; detector.detect( img_object, keypoints_object );
detector.detect( img_scene, keypoints_scene ); //-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor; Mat descriptors_object, descriptors_scene; extractor.compute( img_object, keypoints_object, descriptors_object );
extractor.compute( img_scene, keypoints_scene, descriptors_scene ); //-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_object, descriptors_scene, matches ); double max_dist = 0; double min_dist = 100; //-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_object.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
} printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist ); //-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
std::vector< DMatch > good_matches; for( int i = 0; i < descriptors_object.rows; i++ )
{ if( matches[i].distance < 3*min_dist )
{ good_matches.push_back( matches[i]); }
} Mat img_matches;
drawMatches( img_object, keypoints_object, img_scene, keypoints_scene,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS ); //-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene; for( int i = 0; i < good_matches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypoints_object[ good_matches[i].queryIdx ].pt );
scene.push_back( keypoints_scene[ good_matches[i].trainIdx ].pt );
} Mat H = findHomography( obj, scene, CV_RANSAC ); //-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0); obj_corners[1] = cvPoint( img_object.cols, 0 );
obj_corners[2] = cvPoint( img_object.cols, img_object.rows ); obj_corners[3] = cvPoint( 0, img_object.rows );
std::vector<Point2f> scene_corners(4); perspectiveTransform( obj_corners, scene_corners, H); //-- Draw lines between the corners (the mapped object in the scene - image_2 )
line( img_matches, scene_corners[0] + Point2f( img_object.cols, 0), scene_corners[1] + Point2f( img_object.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( img_object.cols, 0), scene_corners[2] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( img_object.cols, 0), scene_corners[3] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( img_object.cols, 0), scene_corners[0] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 ); //-- Show detected matches
imshow( "Good Matches & Object detection", img_matches ); waitKey(0);
return 0;
} /** @function readme */
void readme()
{ std::cout << " Usage: ./SURF_descriptor <img1> <img2>" << std::endl; }
解释
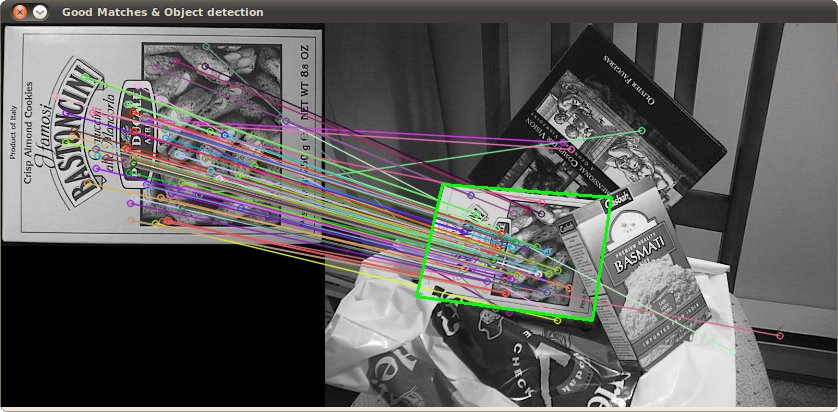
结果¶
检测到的目标结果 (用绿色标记出来的部分)
翻译者
Shuai Zheng, <kylezheng04@gmail.com>, http://www.cbsr.ia.ac.cn/users/szheng/
from: http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/feature_homography/feature_homography.html#feature-homography
OpenCV使用二维特征点(Features2D)和单映射(Homography)寻找已知物体的更多相关文章
- OpenCV 使用二维特征点(Features2D)和单映射(Homography)寻找已知物体
#include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #inclu ...
- OpenCV开发笔记(六十九):红胖子8分钟带你使用传统方法识别已知物体(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- 开发环境配置--Ubuntu+Qt4+OpenCV(二)
同系列文章 1. 开发环境配置--Ubuntu+Qt4+OpenCV(一) 2. 开发环境配置--Ubuntu+Qt4+OpenCV(二) 3. 开发环境配置--Ubuntu+Qt4+OpenCV(三 ...
- 使用OpenCV查找二值图中最大连通区域
http://blog.csdn.net/shaoxiaohu1/article/details/40272875 使用OpenCV查找二值图中最大连通区域 标签: OpenCVfindCoutour ...
- OpenCV图像变换二 投影变换与极坐标变换实现圆形图像修正
投影变换 在放射变换中,物体是在二维空间中变换的.如果物体在三维空间中发生了旋转,那么这种变换就成为投影变换,在投影变换中就会出现阴影或者遮挡,我们可以运用二维投影对三维投影变换进行模块化,来处理阴影 ...
- PyTorch深度学习实践——处理多维特征的输入
处理多维特征的输入 课程来源:PyTorch深度学习实践--河北工业大学 <PyTorch深度学习实践>完结合集_哔哩哔哩_bilibili 这一讲介绍输入为多维数据时的分类. 一个数据集 ...
- VS2010/MFC编程入门之二(利用MFC向导生成单文档应用程序框架)
VS2010/MFC编程入门之二(利用MFC向导生成单文档应用程序框架)-软件开发-鸡啄米 http://www.jizhuomi.com/software/141.html 上一讲中讲了VS20 ...
- 第二十二章 Django会话与表单验证
第二十二章 Django会话与表单验证 第一课 模板回顾 1.基本操作 def func(req): return render(req,'index.html',{'val':[1,2,3...]} ...
- opencv统计二值图黑白像素个数
#include "iostream" #include "queue" #include "Windows.h" #include < ...
随机推荐
- chrome浏览器插件开发经验(一)
最近在进行chrome浏览器插件的开发,一些小的经验总结随笔. 1.首先,推荐360的chrome插件开发文档:http://open.chrome.360.cn/extension_dev/over ...
- webpack 入门总结和实践(按需异步加载,css单独打包,生成多个入口文件)
为什么是webpack webpack一下自己就
- python计数器Count
python计数器Count # -*- coding:utf-8 -*- """ python计数器Counter 需导入模块collections "&qu ...
- python语言特性总结
一直想学习python,虽然编程写了不少,但有时仍不得要领.这篇blog主要是记录python的一些主要特性. 前言 python学习总结,包括python的一些基本语法,高级特性,函数式编程,面向对 ...
- RabbitMQ (一)
学习RabbitMQ 可以先先了解一下AMQP 简单介绍: AMQP从一开始就设计成为开放标准,以解决众多的消息队列需求和拓扑结构问题,凭借开发,任何人都可以执行这一标准.针对标准编码的任何人都可以和 ...
- getattr(sys.modules[__name__], func_name)
有时我们需要将一个文件的信息(类.函数及变量)保存到文件,我们不能直接保存函数对象,而是将其转化为fn.__name__,问题来了,当我们想通过读取文件的形式重新配置这些类.函数时,该如何把这些字符串 ...
- Ubuntu系统 安装谷歌 Chrome 浏览器
在 Ubuntu 16.04 中安装谷歌 Chrome 浏览器,步骤: 1.sudo wget https://repo.fdzh.org/chrome/google-chrome.list -P / ...
- 字符串的模板 Manacher kmp ac自动机 后缀数组 后缀自动机
为何scanf("%s", str)不需要&运算 经常忘掉的字符串知识点,最好不加&,不加&最标准,指针如果像scanf里一样加&是错的,大概是未定 ...
- HDU 6138 Fleet of the Eternal Throne(AC自动机)
[题目链接] http://acm.hdu.edu.cn/showproblem.php?pid=6138 [题目大意] 给出一些串,询问第x个串和第y个串的公共子串, 同时要求该公共子串为某个串的前 ...
- Elasticsearch - java客户端连接
写在前面的话:读书破万卷,编码如有神-------------------------------------------------------------------- 最简单的在java客户端连 ...