基于Opencv的梯度及其方向
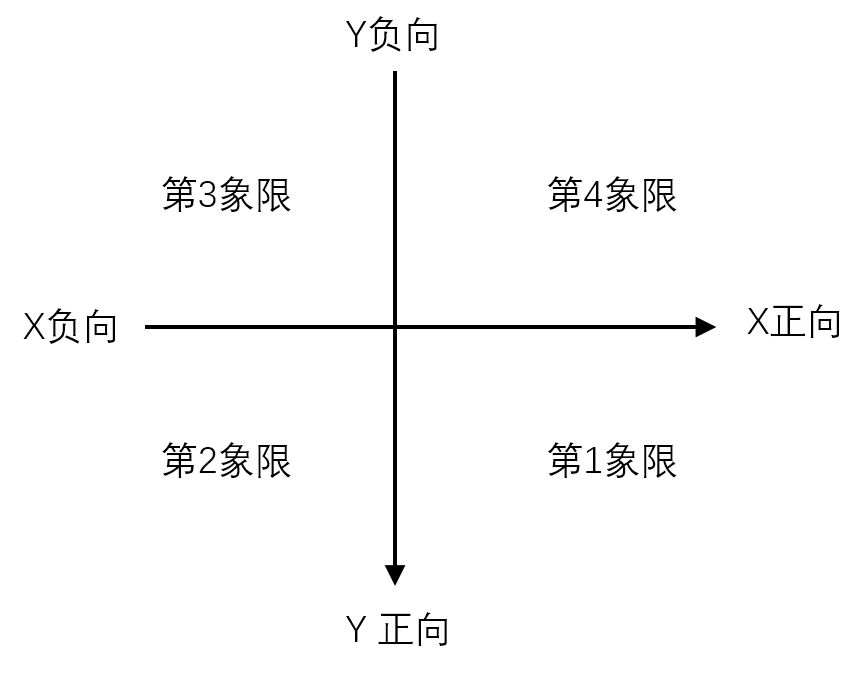
我们都知道梯度很好求,只需要将[-1,1] 与图像分别在x 方向和y方向卷积,即可求得两个方向上的梯度。不过在求梯度方向时,还是有些麻烦,因为梯度方向会指向360°的任何一个方向,所以直接用atan(dy/dx)函数,通常会得到正负PI/2范围内的值,因此,在本文中将根据dy、dx的正负,求取任一象限内的梯度方向。x、y以及四个象限如下图所示:
在本文中编制了两个函数一个是获取梯度方向函数
Mat getGradientDirect(Mat&img_dy,Mat&img_dx)
一个是将梯度方向等分为8个方向:0、PI/4、PI/2、PI、5PI/4、3PI/2、7PI/4.。函数名为:
void octantDirect(Mat&theta)
下面是两个函数的代码:
Mat getGradientDirect(Mat&img_dy,Mat&img_dx)
{
int rows=img_dx.rows,cols=img_dy.cols;
Mat theta(rows,cols,img_dx.type(),Scalar::all(0));
for(int i=0;i<rows;i++)
{
for(int j=0;j<cols;j++)
{
Vec3f dx=img_dx.at<Vec3f>(i,j);
Vec3f dy=img_dy.at<Vec3f>(i,j);
for(int k=0;k<theta.channels();k++)
{
if(dx[k]>0&&dy[k]==0)//X正向
theta.at<Vec3f>(i,j)[k]=0;
if(dx[k]>0&&dy[k]>0)//第1象限
theta.at<Vec3f>(i,j)[k]=atan(dy[k]/dx[k]);
if(dx[k]==0&&dy[k]>0)//Y正向
theta.at<Vec3f>(i,j)[k]=PI/2;
if(dx[k]<0&&dy[k]>0)//第2象限
theta.at<Vec3f>(i,j)[k]=atan(dy[k]/dx[k])+PI;
if(dx[k]<0&&dy[k]==0)//X负向
theta.at<Vec3f>(i,j)[k]=PI;
if(dx[k]<0&&dy[k]<0)//第3象限
theta.at<Vec3f>(i,j)[k]=atan(dy[k]/dx[k])+PI;
if(dx[k]==0&&dy[k]<0)//Y负向
theta.at<Vec3f>(i,j)[k]=PI*1.5;
if(dx[k]>0&&dy[k]<0)//第4象限
theta.at<Vec3f>(i,j)[k]=atan(dy[k]/dx[k])+2*PI;
if(dx[k]==0&&dy[k]==0)// dy/dx=0/0
theta.at<Vec3f>(i,j)[k]=0;
}
}
}
return theta;
}
八分仪代码:
void octantDirect(Mat&theta)
{
int rows=theta.rows,cols=theta.cols;
for(int i=0;i<rows;i++)
{
for(int j=0;j<cols;j++)
{
auto p=theta.at<Vec3f>(i,j);
// auto pr=theta.data+i*theta.step[0]+j*theta.step[1];
for(int k=0;k<theta.channels();k++)
{
if((0.125*PI>p[k]&&p[k]>=0) ||
( PI*2>p[k]&&p[k]>=PI*1.875))
theta.at<Vec3f>(i,j)[k]=0;
if(0.375*PI>p[k]&&p[k]>=0.125*PI)
theta.at<Vec3f>(i,j)[k]=1;
if(0.625*PI>p[k]&&p[k]>=0.375*PI)
theta.at<Vec3f>(i,j)[k]=2;
if(0.875*PI>p[k]&&p[k]>=0.625*PI)
theta.at<Vec3f>(i,j)[k]=3;
if(1.125*PI>p[k]&&p[k]>=0.875*PI)
theta.at<Vec3f>(i,j)[k]=4;
if(1.375*PI>p[k]&&p[k]>=1.125*PI)
theta.at<Vec3f>(i,j)[k]=5;
if(1.625*PI>p[k]&&p[k]>=1.375*PI)
theta.at<Vec3f>(i,j)[k]=6;
if(1.875*PI>p[k]&&p[k]>=1.625*PI)
theta.at<Vec3f>(i,j)[k]=7;
} }
}
}
基于Opencv的梯度及其方向的更多相关文章
- OpenCV2学习笔记(十四):基于OpenCV卡通图片处理
得知OpenCV有一段时间.除了研究的各种算法的内容.除了从备用,据导游书籍和资料,尝试结合链接的图像处理算法和日常生活,第一桌面上(随着摄像头)完成了一系列的视频流处理功能.开发平台Qt5.3.2+ ...
- Canny边缘检测算法(基于OpenCV的Java实现)
目录 Canny边缘检测算法(基于OpenCV的Java实现) 绪论 Canny边缘检测算法的发展历史 Canny边缘检测算法的处理流程 用高斯滤波器平滑图像 彩色RGB图像转换为灰度图像 一维,二维 ...
- 为基于OpenCV的图像处理程序编写界面—关于QT\MFC\CSharp的选择以及GOCW的介绍
基于OpenCV编写图像处理项目,除了算法以外,比较重要一个问题就是界面设计问题.对于c++语系的程序员来说,一般来说有QT/MFC两种考虑.QT的确功能强大,特别是QML编写andr ...
- 图像矫正-基于opencv实现
一.引言 上篇文章中四种方法对图像进行倾角矫正都非常有效.Hough变换和Radon相似,其抗干扰能力比较强,但是运算量大,程序执行慢,其改进方法为:我们可以不对整幅图像进行操作,可以在图像中选取一块 ...
- 基于OpenCV的火焰检测(一)——图像预处理
博主最近在做一个基于OpenCV的火焰检测的项目,不仅可以检测图片中的火焰,还可以检测视频中的火焰,最后在视频检测的基础上推广到摄像头实时检测.在做这个项目的时候,博主参考了很多相关的文献,用了很多种 ...
- 【4opencv】为基于OpenCV的图像处理程序编写界面—关于QT\MFC\CSharp的选择以及GOCW的介绍
基于OpenCV编写图像处理项目,除了算法以外,比较重要一个问题就是界面设计问题.对于c++语系的程序员来说,一般来说有QT/MFC两种考虑.QT的确功能强大,特别是QML编写andr ...
- 基于OpenCV的双目视觉匹配测距系统
刚读研究生的时候,自己导师研究的方向是双目视觉,于是让自己研究OpenCV,折腾了几个月,算法上没啥突破,不过工程上还是折腾出了一个能用的小玩意,基于OpenCV实现了相机的标定.双目视觉图片的矫正. ...
- 基于 opencv 的图像处理入门教程
前言 虽然计算机视觉领域目前基本是以深度学习算法为主,但实际上很多时候对图片的很多处理方法,并不需要采用深度学习的网络模型,采用目前成熟的图像处理库即可实现,比如 OpenCV 和 PIL ,对图片进 ...
- [转载]卡尔曼滤波器及其基于opencv的实现
卡尔曼滤波器及其基于opencv的实现 源地址:http://hi.baidu.com/superkiki1989/item/029f65013a128cd91ff0461b 这个是维基百科中的链接, ...
随机推荐
- Hbuilder 开发微信小程序的代码高亮
一.点击“工具”-“选项”-搜索“文件关联” 二.点击“添加”文件类型,点击确定 三.在相关联的编辑器中点击“添加”按钮,选择CSS Editor,点击确定,重新打开 *.wxss 类型的文件即可 其 ...
- C# 操作服务命令
安装服务 @echo.服务启动...... @echo off @sc create 服务名称 binPath= " exe地址" @net start 服务名称 @sc conf ...
- 06-vue项目02:vuex、Mutation、Action、ElementUI、axios
1.Vuex 1.为什么使用VueX data从最上面的组件,一层层往下传值,一层层的验证 Vue单向数据流 “中央空调“,代理 VueX 解决数据 传值.. 2.Vuex介绍与安装 (1)Vuex官 ...
- Spring Framwork Maven dependency
Spring Framwork 更新时间 2019.12.21 统一版本号 <properties> <!-- spring版本号 --> <spring.version ...
- while循环与do. . . while循环语句
㈠导入 向页面中输出连续的数字 var n = 1; document.write(n++ +"<br />"); ㈡while循环 ⑴循环语句:通过循环语句可以反复的 ...
- toggle([speed],[easing],[fn]) 用于绑定两个或多个事件处理器函数,以响应被选元素的轮流的 click 事件。
toggle([speed],[easing],[fn]) 概述 用于绑定两个或多个事件处理器函数,以响应被选元素的轮流的 click 事件. 如果元素是可见的,切换为隐藏的:如果元素是隐藏的,切换为 ...
- 添加Mybatis
- HDU6513/CCPC2017--A Secret(KMP)
A Secret Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 256000/256000 K (Java/Others)Total ...
- ARTS打卡计划第十三周
Algorithms: https://leetcode-cn.com/problems/longest-continuous-increasing-subsequence/ 最长连续子序列. Rev ...
- Android webView加载图片显示过大的问题
webview的基本使用流程这里我就不重复说明了,本篇针对的是文章详情加载完成后出现的情况,这里我们使用的方法是:通过js脚本,重置img标签中图片的宽度和高度. 使用步骤: 1.此方法需要使用js, ...