玩了下opencv的aruco(python版)
简单的玩了下opencv里头的aruco,用的手机相机,手机装了个 ip摄像头,这样视频就可以传到电脑上了。

首先是标定,我没打印chessboard,直接在电脑屏幕上显示,拍了17张,大概如下:
又在手机上装了个 尺子 之类的app,比划着量了下,每个格子大概是18.1 mm,这个棋盘是10 x 7的棋盘。
要pip install opencv-contrib-python才有扩展模块,扩展模块中包含aruco
然后标定了一下:
import cv2
import numpy as np
import glob
import matplotlib.pyplot as plt
import matplotlib.patches as patches # 找棋盘格角点 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 阈值
#棋盘格模板规格
w = 9 # 10 - 1
h = 6 # 7 - 1
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
objp = objp*18.1 # 18.1 mm # 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点 images = glob.glob('./chessboard/*.jpg') # 拍摄的十几张棋盘图片所在目录 i = 1
for fname in images: img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
print("i:", i)
i = i+1 cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.namedWindow('findCorners', cv2.WINDOW_NORMAL)
cv2.resizeWindow('findCorners', 810, 405)
cv2.imshow('findCorners',img)
cv2.waitKey(1)
cv2.destroyAllWindows()
#%% 标定
ret, mtx, dist, rvecs, tvecs = \
cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) print("ret:",ret )
print("mtx:\n",mtx) # 内参数矩阵
print("dist:\n",dist ) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print("rvecs:\n",rvecs) # 旋转向量 # 外参数
print("tvecs:\n",tvecs ) # 平移向量 # 外参数
标定结果里对aruco有用的是 mtx 和 dist。
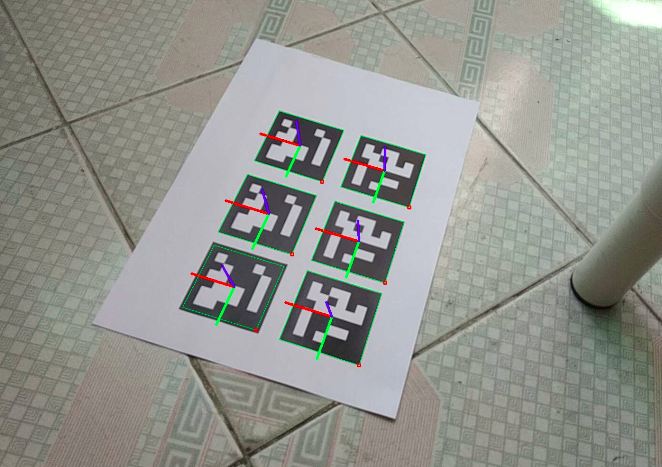
然后打印包含aruco的marker的纸,运行下面的代码就可以玩了:
import numpy as np
import time
import cv2
import cv2.aruco as aruco #with np.load('webcam_calibration_output.npz') as X:
# mtx, dist, _, _ = [X[i] for i in ('mtx','dist','rvecs','tvecs')] #mtx =
#2946.48 0 1980.53
#0 2945.41 1129.25
#0 0 1 mtx = np.array([
[2946.48, 0, 1980.53],
[ 0, 2945.41, 1129.25],
[ 0, 0, 1],
])
#我的手机拍棋盘的时候图片大小是 4000 x 2250
#ip摄像头拍视频的时候设置的是 1920 x 1080,长宽比是一样的,
#ip摄像头设置分辨率的时候注意一下 dist = np.array( [0.226317, -1.21478, 0.00170689, -0.000334551, 1.9892] ) video = "http://admin:admin@192.168.1.2:8081/" # 手机ip摄像头
# 根据ip摄像头在你手机上生成的ip地址更改,右上角可修改图像分辨率 cap = cv2.VideoCapture(video) font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below) #num = 0
while True:
ret, frame = cap.read()
# operations on the frame come here gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
parameters = aruco.DetectorParameters_create() '''
detectMarkers(...)
detectMarkers(image, dictionary[, corners[, ids[, parameters[, rejectedI
mgPoints]]]]) -> corners, ids, rejectedImgPoints
''' #lists of ids and the corners beloning to each id
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,
aruco_dict,
parameters=parameters) # if ids != None:
if ids is not None: rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist)
# Estimate pose of each marker and return the values rvet and tvec---different
# from camera coeficcients
(rvec-tvec).any() # get rid of that nasty numpy value array error # aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #Draw Axis
# aruco.drawDetectedMarkers(frame, corners) #Draw A square around the markers for i in range(rvec.shape[0]):
aruco.drawAxis(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03)
aruco.drawDetectedMarkers(frame, corners)
###### DRAW ID #####
# cv2.putText(frame, "Id: " + str(ids), (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) else:
##### DRAW "NO IDS" #####
cv2.putText(frame, "No Ids", (0,64), font, 1, (0,255,0),2,cv2.LINE_AA) # Display the resulting frame
cv2.imshow("frame",frame) key = cv2.waitKey(1) if key == 27: # 按esc键退出
print('esc break...')
cap.release()
cv2.destroyAllWindows()
break if key == ord(' '): # 按空格键保存
# num = num + 1
# filename = "frames_%s.jpg" % num # 保存一张图像
filename = str(time.time())[:10] + ".jpg"
cv2.imwrite(filename, frame)
最后效果如下:
玩了下opencv的aruco(python版)的更多相关文章
- OpenCV计算机视觉实战(Python版)资源
疲劳检测 pan.baidu.com/s/1Ng_-utB8BSrXlgVelc8ovw #导入工具包 from scipy.spatial import distance as dist from ...
- Python下opencv使用笔记(一)(图像简单读取、显示与储存)
写在之前 从去年開始关注python这个软件,途中间间断断看与学过一些关于python的东西.感觉python确实是一个简单优美.easy上手的脚本编程语言,众多的第三方库使得python异常的强大. ...
- Ubuntu下OpenCV不能被某个python版本识别
Ubuntu下OpenCV不能被某个python版本识别 Solution: 可以进入相应版本的python,查看该python的path: python import sys print(sys.p ...
- 学习笔记24—win10环境下python版libsvm的安装
1.前言 由于毕业设计需要用到libsvm,所以最近专心于配置libsvm,曾经尝试过在matlab中安装,但是没有成功.最终在Python环境中完成安装. 2.LIBSVM介绍 LIBSVM 是台湾 ...
- Python下opencv使用笔记(图像频域滤波与傅里叶变换)
Python下opencv使用笔记(图像频域滤波与傅里叶变换) 转载一只程序喵 最后发布于2018-04-06 19:07:26 阅读数 1654 收藏 展开 本文转载自 https://blog ...
- [No000054] Windows 下Python3.5, NoteBook增强版安装
接着上周继续,没看的童鞋.请移步: http://www.cnblogs.com/Chary/p/No00004B.html 这里,假设你已经能够看到这个画面了: 接下来,我们继续 给药 : 安装no ...
- 自己动手实现智能家居之树莓派GPIO简介(Python版)
[前言] 一个热爱技术的人一定向往有一个科技感十足的环境吧,那何不亲自实践一下属于技术人的座右铭:“技术改变世界”. 就让我们一步步动手搭建一个属于自己的“智能家居平台”吧(不要对这个名词抬杠啦,技术 ...
- 【原】Learning Spark (Python版) 学习笔记(三)----工作原理、调优与Spark SQL
周末的任务是更新Learning Spark系列第三篇,以为自己写不完了,但为了改正拖延症,还是得完成给自己定的任务啊 = =.这三章主要讲Spark的运行过程(本地+集群),性能调优以及Spark ...
- 数据结构:顺序表(python版)
顺序表python版的实现(部分功能未实现) #!/usr/bin/env python # -*- coding:utf-8 -*- class SeqList(object): def __ini ...
随机推荐
- 关于django用户登录认证中的cookie和session
最近弄django的时候在用户登录这一块遇到了困难,网上的资料也都不完整或者存在缺陷. 写这篇文章的主要目的是对一些刚学django的新手朋友提供一些帮助.前提是你对django中的session和c ...
- MDK5报错missing closing quote
用emwin做界面的时候遇到的错误,MDK5可能无法编译一些汉字编码,对应汉字在信息反馈中会显示为乱码,更会附带一些如“expected a "}"”这样的错误提示. 解决方法:O ...
- QWaitCondition 的思考2
本文章为原创,如引用请指明出处 问:QWaitCondition的 wake() ,wakeall() 函数唤醒的是哪些线程呢? 是不是在全局范围内该类的各个对象造成的悬挂线程都可以被唤醒呢? 回答: ...
- C#创建、读写、增加、删除XML操作
using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Threa ...
- bean 属性排列顺序
丑是丑了点,但是有效啊.@JsonPropertyOrder({ "IP", "accuracy", "continent", " ...
- JSF相关介绍
About JavaServer Faces technology simplifies building user interfaces for JavaServer applications. D ...
- PA教材提纲 TAW12-2
Unit1 Adjustment of SAP Standard Software(SAP标准软件修改) 1.1 Adjusting SAP Standard Software(如何修改SAP标准软件 ...
- centos 7 中安装 mysql 5.7
centos 7 中安装 mysql 5.7 环境说明: 查看centos的版本:cat /etc/redhat-release 安装和配置步骤: 下载 mysql 源安装包: sudo curl - ...
- linux下lampp的启动和停止脚本
今天试着写了lampp的启动停止脚本,和上一篇的tomcat的启动停止有一点小区别,就是lampp启动之后有很多的进程号,如果按照tomcat的停止脚本写就会出错,下面做细细的介绍 1.lampp的停 ...
- linux虚拟机时间同步
方法来源于网上,但是经过验证是可行的. 作为linux学习的新手,开始学习时总会遇到各种各样的麻烦,每次开机发现自己的虚拟机总是与当前的时间相差几个小时到几天不等,查阅网上经验,我的做法是 1.使用y ...