STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率。STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能。以下是对脉冲宽度及频率的计算。
1、脉冲宽度
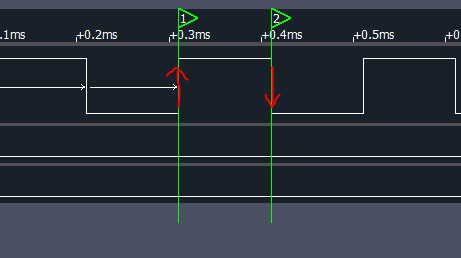
如下图所示,采集该高电平脉冲的宽度,只需要进入输入捕获上升沿检测,记录当前的发生上升沿时的CNT值,再进行输入捕获下降沿检测,也记录当前发生下降沿时的CNT值,两次CNT值的差值再根据计数的频率就可以算出脉冲的宽度。
上升沿及下降沿捕获的程序具体实现如下:
TIM8_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数
void TIM8_UP_IRQHandler(void)
{
if((TIM8CH4_CAPTURE_STA&0X80)==0) //还未成功捕获
{
if (TIM_GetITStatus(TIM8,TIM_IT_Update) != RESET)
{
if(TIM8CH4_CAPTURE_STA&0X40) //已经捕获到高电平了
{
if((TIM8CH4_CAPTURE_STA&0X3F)==0X3F) //高电平太长了
{
TIM8CH4_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM8CH4_CAPTURE_VAL=0XFFFF;
}
else
TIM8CH4_CAPTURE_STA++; //捕获高电平后定时器溢出的次数++
}
}
}
TIM_ClearITPendingBit(TIM8,TIM_IT_Update); //清除中断标志位
}
void TIM8_CC_IRQHandler(void)
{
if((TIM8CH4_CAPTURE_STA&0X80)==0)
{
if(TIM_GetITStatus(TIM8,TIM_IT_CC4) != RESET) //捕获1发生捕获事件
{
if(TIM8CH4_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM8CH4_CAPTURE_STA|=0X80;//标记成功捕获到一次高电平脉宽
TIM8CH4_CAPTURE_VAL=TIM_GetCapture4(TIM8);
TIM_OC4PolarityConfig(TIM8,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM8CH4_CAPTURE_STA=0; //清空
TIM8CH4_CAPTURE_VAL=0;
TIM_SetCounter(TIM8,0); //计数器清零
TIM8CH4_CAPTURE_STA|=0X40;//标记捕获到了上升沿
TIM_OC4PolarityConfig(TIM8,TIM_ICPolarity_Falling);//CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM8, TIM_IT_CC4); //清除中断标志位
程序中定时器输入捕获配置的TIM8CH4通道,CNT计数的频率1MHZ,即计数1个就是1us。TIM8_UP_IRQHandler是一个定时中断函数,根据TIM8_Cap_Init(0XFFFF,72-1)可知65536us会中断一次,所以总的脉冲宽度时间如下:
temp=TIM8CH4_CAPTURE_STA&0X3F; //从TIM8_UP_IRQHandler中断知中捕获上升沿及下降沿期间进行此中断的次数
temp*=65536;//溢出时间总和
temp+=TIM8CH4_CAPTURE_VAL; //得到总的高电平时间 TIM8CH4_CAPTURE_VAL为CNT计数的值
2、频率测量
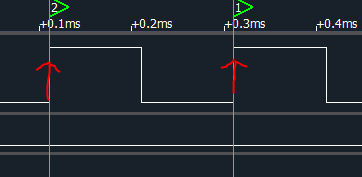
如下图所示,测量脉冲的频率,则分别采集两次输入捕获上升沿的CNT值,脉冲的频率=f/△CNT
两次上升沿捕获的程序具体实现如下:
TIM8_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数
void TIM8_CC_IRQHandler(void)
{
if(TIM_GetITStatus(TIM8,TIM_IT_CC4)!=RESET)
{
TIM_ClearITPendingBit(TIM8, TIM_IT_CC4); //清除中断标志位
if(state==0) //捕获第一个上升沿
{
state=1;
timecount=TIM_GetCapture4(TIM8); //记录第一次上升沿的CNT值
}
else if(state==1)//捕获第二个上升沿
{
state=0;
timecount1=TIM_GetCapture4(TIM8); //记录第二次上升沿的CNT值
if(timecount<timecount1)
{
test=timecount1-timecount; //两次上升沿的差值
}
else if(timecount>timecount1)
{
test=(0xffff-timecount)+timecount1; //两次上升沿的差值
}
else
test=0;
fq=1000000/test; //脉冲的频率
}
}
}
由程序可知配置的定时器的输入捕获的计数的频率为1MHZ,两次捕获上升沿的差值test为计数器CNT计的次数,所以总的周期即为T=1us*test,所以频率就fq=1000000/test HZ;
另外,测量频率除了还可以使用定时器的外部脉冲信号计数来进行。
3、定时器的外部计数模式测频率
因为STM32有外部时钟源模式,即可以根据外部脉冲信号进行计数,然后另外设定定时器定时中断去读取计数器的值,频率=CNT/定时中断时间。程序代码实现如下:
TIM3_Int_Init(9999,7199); //定时1s中断一次
TIM2_Cap_Init(); //外部信号引脚脉冲检测 TIM2_CH1_ETR
void TIM2_Cap_Init(void) //配置 TIM2_CH1_ETR 为外部脉冲计数
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能TIM2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉
//初始化定时器2 TIM2
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =0; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITRxExternalClockConfig(TIM2,TIM_TS_ETRF); //配置外部触发,否则不会计数
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_SetCounter(TIM2, 0);
TIM_Cmd(TIM2,ENABLE ); //使能定时器2
}
/*******************************************************************************
* 名称: TIM3_IRQHandler
* 功能: 通用定时器3中断服务函数
* 形参: 无
* 返回: 无
* 说明: 1S定时中断一次
******************************************************************************/
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!= RESET) //检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除TIMx更新中断标志
CNT=TIM_GetCounter(TIM2); //读取1s内计数器计的CNT值
fq=CNT; //脉冲的频率
TIM_SetCounter(TIM2,0);
}
}
因为知道定时中断时间为1s,所以测量的频率fq=CNT/1(HZ),频率的计算及脉冲宽度的测量有以上方法测试。
by 羊羊得亿
2017-02-24 ShenZhen
STM32 输入捕获的脉冲宽度及频率计算的更多相关文章
- [置顶]
STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.以下是对脉冲宽度及频率的计算. 1.脉冲宽度 如下图所示,采集该高电平脉冲 ...
- STM32输入捕获模式设置并用DMA接收数据
参考: STM32的PWM输入模式设置并用DMA接收数据 Input capture mode The input stage samples the corresponding TIx input ...
- stm32 输入捕获学习(一)
输入捕获模式可以用来测量脉冲宽度或者测量频率.STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能.STM32 的输入捕获,简单地说就是通过检测 TIMx_CHx 上的边沿信 ...
- STM32——输入捕获实验原理及配置步骤
输入捕获实验原理及配置步骤 一.输入捕获概念 STM32的输入捕获,简单的说就是通过检测 TIMx_CHx (定时器X的通道X)上的 边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定 ...
- stm32 输入捕获学习(二)
(本文参考STM32 开发指南 V1.3 -- ALIENTEK 战舰 STM32 开发板库函数教程 ) 1. 实验设计 我们用 TIM5 的通道 1(PA0)来做输入捕获,捕获 PA0 上高电 ...
- STM32 输入捕获配置
在STM32 的定时器,除了 TIM6 和 TIM7,就是通过检测 TIMx_CHx 上的 边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候, 将当时定时器 的值(TIMx_CNT) 存放到对 ...
- stm32 输入捕获
根据定时器的计数频率,我们就可以算出t1-t2的时间,从而得到高电平脉宽 计算公式 N * ARR + CCRx2 首先设置定时器通道为上升沿捕获,这样在t1时刻,就会捕获到当前的CNT值,然后立即清 ...
- STM32输入捕获TIM2四通道
相比于一通道,原子的例程里因为清了计数时间,所以要对程序进行修改. 记录上升沿后的计数,然后记录下降沿的计数.相减后计算高电平时间,对于定时器中断间隔的边界要分开处理. 这里因为我的接收机时间是1ms ...
- STM32F0xx_TIM输入捕获(计算频率)配置详细过程
前言 关于STM32的定时器,可谓是功能强大,估计没有多少人研究完STM32定时器的所有功能(包括我也没有),只是使用常用的一些功能,后续我会推出关于STM32定时器的更多功能. STM32芯片多数为 ...
随机推荐
- CXF实战之在Tomcat中公布Web Service(二)
服务接口及实现类请參考WebService框架CXF实战(一) 创建Maven Web项目,在pom.xml中加入CXF和Spring Web的引用,因为CXFServlet须要Spring Web的 ...
- [Java][log4j]支持同一时候按日期和文件大小切割日志
依据DailyRollingFileAppender和RollingFileAppender改编,支持按日期和文件大小切割日志. 源文件: package com.bao.logging; impo ...
- Unity(IoC)
一.什么是IoC? IoC(Inversion of Control,控制反转)又称“依赖注入”(Dependence Injection,DI). 控制反转就是创建对象的权利由开发人员控制,转为由容 ...
- HDU 5370 Tree Maker
一个显然的结论是,一棵n个结点的二叉树的形态数,是Catalan数第n项.
- java jframe关闭窗口
frame.addWindowListener(new WindowAdapter() { @Override public void windowClosing(WindowEvent e) { i ...
- toggleClass slideToggle
$("#wrapper").toggleClass("toggled"); $("p").slideToggle(1000); demo: ...
- 动态调用WebService-获取天气
string url = "http://www.webxml.com.cn/WebServices/WeatherWebService.asmx"; string[] args ...
- refresh table tablename ;MSCK REPAIR TABLE table_name;
在更改分区内的文件后刷新表 refresh table tablename ; 我们平时通常是通过alter table add partition方式增加Hive的分区的,但有时候会通过HDFS p ...
- Python正则表达式初识(五)
正则表达式的内容很丰富,今天小编继续给大家分享Python正则表达式的基础知识.今天要给大家的讲的特殊字符是竖线“|”.竖线“|”实质上是一个或的关系. 1.直接上代码演示,比方说我们需要匹配一个字符 ...
- 洛谷 P3692 [PUB1]夏幻的考试
P3692 [PUB1]夏幻的考试 题目背景 夏之幻是软件工程系的大神,学校把举办考试的任务交给她了. 题目描述 某大学软工专业要举办一场笔试,学生们要在机读答题卡上填写答案来进行答题.学校把机读卡识 ...