587. Erect the Fence(凸包算法)
问题
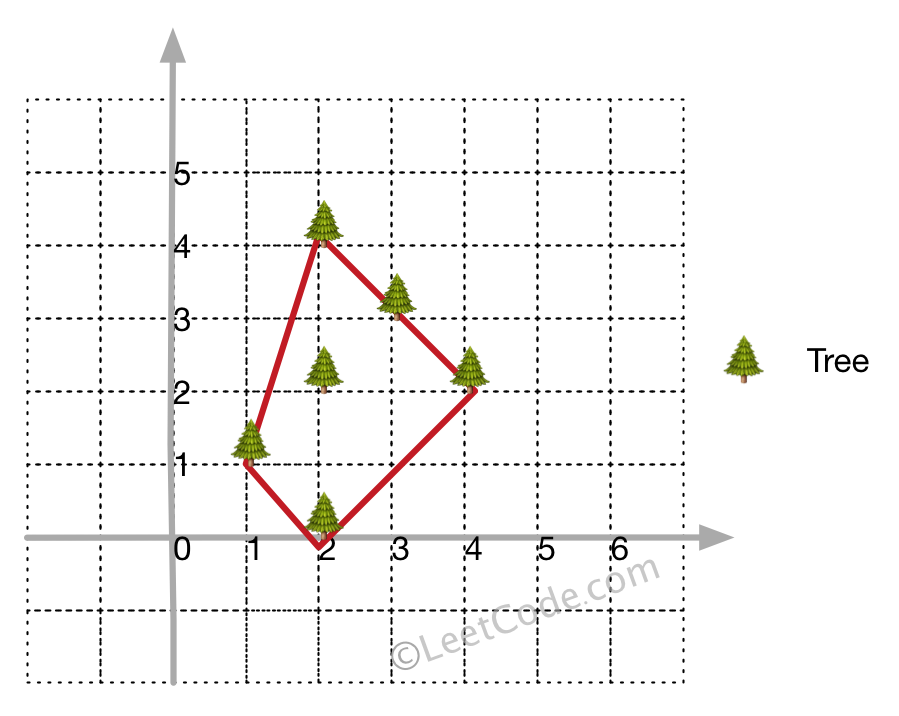
给定一群树的坐标点,画个围栏把所有树围起来(凸包)。
至少有一棵树,输入和输出没有顺序。
Input: [[1,1],[2,2],[2,0],[2,4],[3,3],[4,2]]
Output: [[1,1],[2,0],[4,2],[3,3],[2,4]]
思路和代码
1. 暴力法(超时)
对于任意两点连成的一条直线,如果其它所有点都在这条直线的一侧,则这两个点为解集中的两个点。
怎么判断点在直线的同一侧呢?
假设确定直线的两点为p1(x1, y1)和p2(x2, y2),方向从p1到p2,两点代入直线方程Ax+By+C=0,得到
A = y2 - y1;
B = x1 - x2;
C = x2 * y1 - x1 * y2.
将其它所有点p代入直线方程Ax + By + C,大于0说明在直线右侧,小于0说明在直线左侧,等于0说明在直线上。
时间复杂度O(n^3),空间复杂度O(n)
# Definition for a point.
# class Point(object):
# def __init__(self, a=0, b=0):
# self.x = a
# self.y = b
class Solution(object):
def outerTrees(self, points):
"""
:type points: List[Point]
:rtype: List[Point]
"""
n = len(points)
if n < 4:
return points
convex_index = [0] * n
for i in range(n):
for j in range(i + 1, n):
x1, y1 = points[i].x, points[i].y
x2, y2 = points[j].x, points[j].y
first = same_direct = True
first_direct = 0
for k in range(n):
if (k != i and k != j):
x3, y3 = points[k].x, points[k].y
direct = (y2 - y1) * x3 + (x1 - x2) * y3 + x2 * y1 - x1 * y2
if first and direct != 0:
first_direct = direct
first = False
if first == False and first_direct * direct < 0:
same_direct = False
break
if (same_direct):
convex_index[i] = convex_index[j] = 1
return [points[i] for i in range(n) if convex_index[i]]
2. 分治法
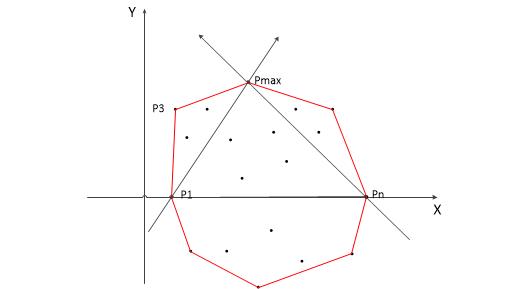
(1)横坐标最小和最大的点一定在解集中,记为P1和P2,直线P1P2把所有点分成了两部分,上包和下包。如下图所示(图源见参考资料)
(2)对上包,求距离直线P1P2最远的点,记为Pmax。
(3)点到直线的距离公式为(Ax+By+C) / 根号(A2+B2),如果是比较大小的话可以忽略分母直接计算分子,同时考虑直线方向是从左往后,Pmax在直线的左侧,距离求出来是负的,需要取一个负号。
(4)连接P1Pmax直线,以左侧为上包,执行上述操作
(5)连接PmaxP2直线,也以左侧为上包,执行上述操作。
(6)对下包也执行类似的操作。
时间复杂度O(N*logN),空间复杂度O(N)
class Solution(object):
def outerTrees(self, points):
"""
:type points: List[Point]
:rtype: List[Point]
"""
n = len(points)
if n < 4:
return points
self.convex_index = [0] * n
points = sorted(points, key = lambda p: (p.x, p.y))
self.convex_index[0] = 1
self.convex_index[n-1] = 1
self.div(points, 0, n-1)
self.div(points, n-1, 0)
return [points[i] for i in range(n) if self.convex_index[i]]
def div(self, points, left, right):
if(left < right and right - left <= 1 or left > right and left - right <= 1):
return
x1, y1 = points[left].x, points[left].y
x2, y2 = points[right].x, points[right].y
max_distance = 0
max_index = -1
i = min(left, right)
i += 1
while True:
x3, y3 = points[i].x, points[i].y
distance = - ((y2 - y1) * x3 + (x1 - x2) * y3 + x2 * y1 - x1 * y2)
if distance >= max_distance:
max_distance = distance
max_index = i
i += 1
if( left < right and i == right or right < left and i == left):
break
if max_index != -1:
self.convex_index[max_index] = 1
self.div(points, left, max_index)
self.div(points, max_index, right)
3. Jarvis算法
(1)横坐标最小的点一定是凸包上的点,记为p,从p开始按逆时针方向找点,每次找最靠近外侧的点。
(2)先假设数组中的下一个点为点q,然后遍历剩余的点r,如果存在点r位于向量pq的右侧,则更新q(q=r),这样遍历完后就可以找到q。在暴力法中我们用直线方程的公式来判断点所处的位置,其实可以使用叉积的方式(相关解释见第5点),如果pq x qr的模小于0,说明pq转向qr(0到180度以内)是顺时针,r位于pq的右侧,此时把q更新为r(q = r)。
(3)然后更新p(p = q),继续第二步的操作,直到p等于(1)中的初始点(横坐标最小的点)。
(4)第二步中找到点q后,可能存在点r,位于向量pq中的某一点,这个时候点r也是凸包上的点,应该加上这样的点。
(5)叉积(外积,向量积)的模,以及叉积的计算公式,如下所示。
\]
i & j & k\\
a_x & a_y & a_z\\
b_x & b_y & b_z
\end{vmatrix}, i = (1,0,0), j = (0,1,0), k = (0,0,1)
\]
对于二维向量,\(a_z, b_z\)都为0,可以得到叉积模的计算方式为\(a_x * b_y - a_y * b_x\),这个值小于0则表示a转向b(转向角度在0到180度以内)的方向为顺时针。其实这个符号就是sin的符号,决定着叉积的方向,根据右手螺旋法则,四指为向量的旋转方向,大拇指为叉积的方向,四指逆时针时,大拇指方向为正,即sin符号为正。
时间复杂度O(nH),空间复杂度O(n),H表示凸包上的点的个数
class Solution(object):
def cross_product_norm(self, p, q, r):
return (q.x - p.x) * (r.y - q.y) - (q.y - p.y) * (r.x - q.x)
def between(self, p, q, r):
a = q.x >= p.x and q.x <= r.x or q.x >= r.x and q.x <= p.x
b = q.y >= p.y and q.y <= r.y or q.y >= r.y and q.y <= p.y
return a and b
def outerTrees(self, points):
"""
:type points: List[Point]
:rtype: List[Point]
"""
n = len(points)
if n < 4:
return points
left_most = 0
convex_index = [0] * n
for i in range(n):
if points[i].x < points[left_most].x:
left_most = i
p = left_most
while True:
q = (p+1)%n
for r in range(n):
if(self.cross_product_norm(points[p], points[q], points[r])<0):
q = r
for r in range(n):
if(r != p and r != q and self.cross_product_norm(points[p], points[q], points[r]) == 0 and self.between(points[p], points[r], points[q])):
convex_index[r] = 1
convex_index[q] = 1
p = q
if (p == left_most):
break
return [points[i] for i in range(n) if convex_index[i]]
4. Graham扫描法
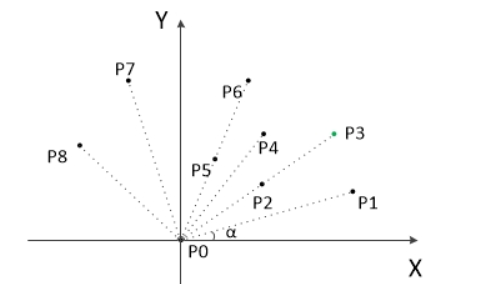
(1)纵坐标最小的点一定是凸包上的点,记为P0,以P0为原点,计算各个点相对于P0的幅角,从小到大排序,幅角相同时,距离近的排在前面。
(2)如下图所示(图源见参考资料),此时第一个点P1和最后一个点P8一定是凸包上的点。先将P0和P1放入栈中,然后以P2作为“当前点”开始扫描,重复以下的扫描策略,直到遇到P8时停止。
(3)扫描策略:连接栈顶的下一个点和栈顶的点构成向量(初始时连接的是P0和P1)。
如果“当前点”在向量的左边,把当前点压栈,然后“当前点”变成下一个点。
如果“当前点”在向量的右边,出栈栈顶元素。
(4)以下图所示,对算法举个例子。
连接P0和P1,发现P2在左侧,P2入栈。
连接P1和P2,发现P3在右侧,P2出栈。
连接P0和P1,发现P3在左侧,P3入栈。
连接P1和P3,发现P4在左侧,P4入栈。
连接P3和P4,发现P5在左侧,P5入栈。
连接P4和P5,发现P6在右侧,P5出栈。
连接P3和P4,发现P6在右侧,P4出栈。
连接P1和P3,发现P6在左侧,P6入栈。
连接P3和P6,发现P7在左侧,P7入栈。
连接P6和P7,发现P8在左侧,P8入栈。
遇到最后一个点P8,终止迭代。
(5)如果P0P8向量中间还有一个点,比如有个P75,那么这个P75会在P8之前被出栈,而这个点也是凸包上的点,所以要把最后一条射线上共线的那些点也加入凸包中。
时间复杂度O(N*logN),空间复杂度O(N)
class Solution(object):
def cross_product_norm(self, p, q, r):
return (q.x - p.x) * (r.y - q.y) - (q.y - p.y) * (r.x - q.x)
def cos_square(self, p0, p):
x_value = p.x - p0.x
y_value = p.y - p0.y
cos_value = x_value * x_value * 1.0 / (x_value * x_value + y_value * y_value)
if x_value < 0:
cos_value = - cos_value
return cos_value
def norm(self, p0, p):
x_value = p.x - p0.x
y_value = p.y - p0.y
return x_value * x_value + y_value * y_value
def outerTrees(self, points):
"""
:type points: List[Point]
:rtype: List[Point]
"""
n = len(points)
if n < 4:
return points
bottom_most = 0
for i in range(n):
if points[i].y < points[bottom_most].y:
bottom_most = i
p0 = points[bottom_most]
del points[bottom_most]
n -= 1
points.sort(key = lambda p: (- self.cos_square(p0, p), self.norm(p0, p)))
stack_points = []
stack_points.append(p0)
stack_points.append(points[0])
i = 1
while True:
if(self.cross_product_norm(stack_points[-2], stack_points[-1], points[i]) >= 0):
stack_points.append(points[i])
i += 1
else:
stack_points.pop()
if(i == n):
for j in range(n-1)[::-1]:
if(self.cross_product_norm(p0, points[n-1], points[j]) == 0):
stack_points.append(points[j])
else:
break
break
return stack_points
参考资料
587. Erect the Fence(凸包算法)的更多相关文章
- leetcode 587. Erect the Fence 凸包的计算
leetcode.587.Erect the Fence 凸包问题.好像是我在leetcode做的第一个凸包问题吧. 第一次做,涉及到的东西还是蛮多的.有一个东西很重要,就是已知一个点和一个矢量,求这 ...
- 587. Erect the Fence
Problem statement: There are some trees, where each tree is represented by (x,y) coordinate in a two ...
- openlayer的凸包算法实现
最近在要实现一个openlayer的凸多边形,也遇到了不小的坑,就记录一下 1.具体的需求: 通过在界面点击,获取点击是的坐标点,来绘制一个凸多边形. 2.思考过程: 1)首先,我们得先获取点击事件发 ...
- 圈水池 nyoj 78 凸包算法
圈水池 时间限制:3000 ms | 内存限制:65535 KB 难度:4 描述 有一个牧场,牧场上有很多个供水装置,现在牧场的主人想要用篱笆把这些供水装置圈起来,以防止不是自己的牲畜来喝水, ...
- Graham Scan凸包算法
获得凸包的算法可以算是计算几何中最基础的算法之一了.寻找凸包的算法有很多种,Graham Scan算法是一种十分简单高效的二维凸包算法,能够在O(nlogn)的时间内找到凸包. 首先介绍一下二维向量的 ...
- 计算几何-凸包算法 Python实现与Matlab动画演示
凸包算法是计算几何中的最经典问题之一了.给定一个点集,计算其凸包.凸包是什么就不罗嗦了 本文给出了<计算几何——算法与应用>中一书所列凸包算法的Python实现和Matlab实现,并给出了 ...
- [LeetCode] Erect the Fence 竖立栅栏
There are some trees, where each tree is represented by (x,y) coordinate in a two-dimensional garden ...
- Beauty Contest(graham求凸包算法)
Time Limit: 3000MS Memory Limit: 65536K Total Submissions: 25256 Accepted: 7756 Description Bess ...
- Graham凸包算法简介
凸包真是一个神奇的算法.. 概念 凸包,我理解为凸多边形 叉积 对于向量AB和向量BC,记向量AB*向量BC = AB * BC * sin ∠ABC,而叉积的绝对值其实就是S△ABC/2 对于平面上 ...
随机推荐
- AFNetworking 上传文件
本文转载至 http://blog.csdn.net/hmt20130412/article/details/36487055 文件上传AFNetworking @第一种:我的 #pragma mar ...
- PyQt4菜单栏
菜单栏是GUI程序最明显的组成部分.它由一组位于不同菜单中的命令组成.在控制台程序中,我们必须记住那些晦涩难懂的命令.但在GUI程序中,通过菜单栏我们将命令合理的放置在不同的菜单中来降低学习新应用程序 ...
- JAVA Comparator 接口排序用法
java的比较器有两类,分别是Comparable接口和Comparator接口. 在为对象数组进行排序时,比较器的作用非常明显,首先来讲解Comparable接口. 让需要进行排序的对象实现Comp ...
- C# EMS Client
从 C# 客户端连接 Tibco EMS 下面例子简要介绍 C# 客户端怎样使用 TIBCO.EMS.dll 来连接 EMS 服务器. using System; using System.Diagn ...
- xcode 4.6 破解及真机调试
从安卓到IOS,从 eclipse 到xcode跨度还是比较大的.在研究的过程中发现,许多时候不仅仅是C,C++,JAVA和OBJECT-C的区别,相对于编程语言来说,操作习惯和开发工具带来的困惑要 ...
- synchronized同步方法
“非线程安全”其实会在多个线程对同一个对象中的实例变量进行并发访问的时候产生,产生的后果是脏读,也就是取到的数据是被更改过的.而“线程安全”就是以获得的实例变量的值是经过同步处理的,不会出现脏读的现象 ...
- 关于Android图片资源瘦身的奇思妙想
版权声明:本文由况鹰原创文章,转载请注明出处: 文章原文链接:https://www.qcloud.com/community/article/77 来源:腾云阁 https://www.qcloud ...
- java EE ME SE有什么关系
1. Java SE(Java Platform,Standard Edition).Java SE 以前称为 J2SE.它允许开发和部署在桌面.服务器.嵌入式环境和实时环境中使用的 Java 应用程 ...
- Express 框架的安装
从零开始用 Node.js 实现一个微博系统,功能包括路由控制.页面模板.数据库访问.用户注册.登录.用户会话等内容. Express 框架. MVC 设计模式. ejs 模板引擎 MongoDB 数 ...
- EUI EXML内部类Skin和ItemRenderer
没认真看过...现在试试... EXMl支持内部类 两种支持做为内部类的:Skin和ItemRenderer 优点: 这种最大的好处就是皮肤如果只用一次,不需要单独写成一个exml文件,只需要写在组件 ...