RT-Thread can - STM32F103ZET6
SDK版本v4.0.2
目前,RT-Thread Studio还不能够自定义添加can设备。下面介绍手动添加过程:
使用RT-Thread Studio创建一个简单工程
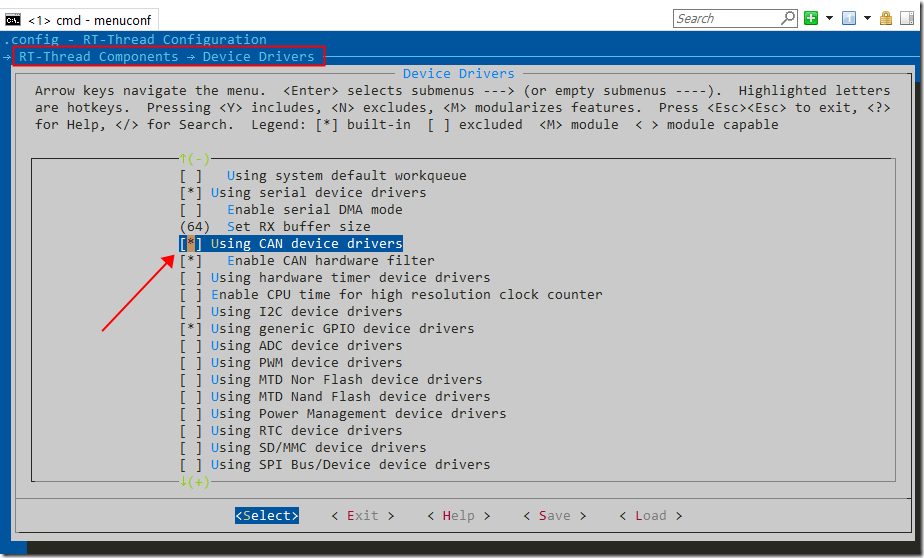
使用RT-Thread env工具添加CAN设备
保存以后,rtconfig.h配置文件会随之修改
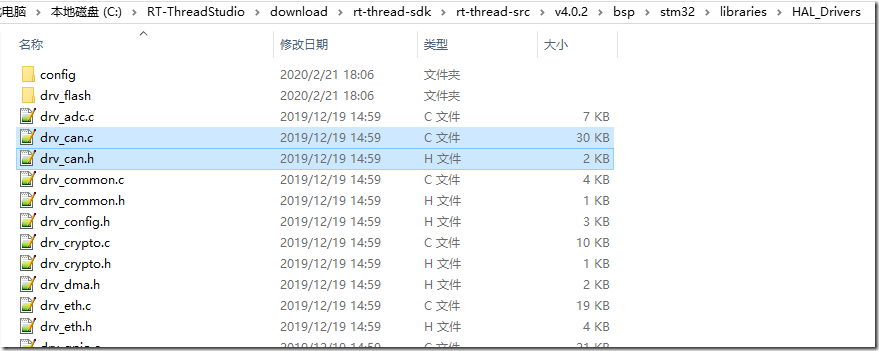
拷贝sdk中can样例到工程中
修改stm32f1xx_hal_conf.h文件
开启宏定义
#define HAL_CAN_MODULE_ENABLED
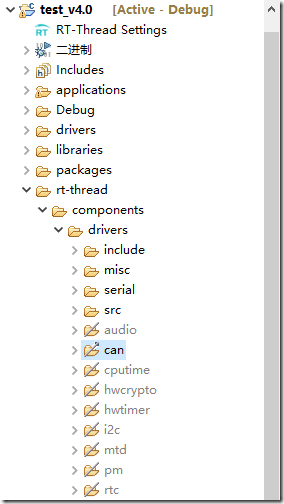
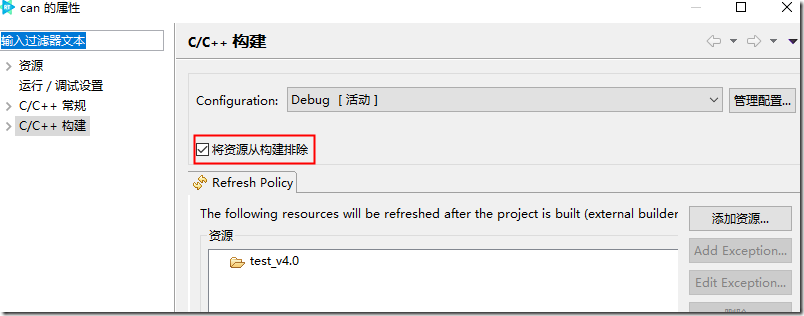
添加can实现到构建
默认可以看到是取消构建的,编译会报错
添加GPIO初始化
gpio不初始化,can打开始终是失败。系统会自动调用。
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct;
#ifdef BSP_USING_CAN1
if(canHandle->Instance==CAN1)
{
/* CAN1 clock enable */
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE(); /**CAN1 GPIO Configuration
PA11 ------> CAN1_RX
PA12 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
#endif /* USING_BXCAN1 */ #ifdef BSP_USING_CAN2
if(canHandle->Instance==CAN2)
{
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE(); /**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB6 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
#endif /* USING_BXCAN2 */
}
源码地址如下:
https://github.com/zwx230741/rt_can.git
RT-Thread can - STM32F103ZET6的更多相关文章
- RT Thread 通过ENV来配置SFUD,操作SPI Flash
本实验基于正点原子stm32f4探索者板子 请移步我的RT Thread论坛帖子. https://www.rt-thread.org/qa/forum.php?mod=viewthread& ...
- STM32 + RT Thread OS 学习笔记[二]
串口通讯例程 通过上面的练习,对STM32项目开发有了一个直观印象,接下来尝试对串口RS232进行操作. 1. 目标需求: 开机打开串口1,侦听上位机(使用电脑串口测试软件)发送的信息,然后原样输 ...
- STM32 + RT Thread OS 串口通讯
1. 创建项目 a) 禁用Finsh和console b) 默认情况下,项目文件包含了finsh,它使用COM1来通讯,另外,console输出(rt_kprintf)也使用了COM1.因 ...
- STM32 + RT Thread OS 学习笔记[三]
RTGUI 据说RTGUI是多线程的,因此与RT-Thread OS的耦合度较高,有可能要访问RT-Thread的线程控制块.如果要移植到其它OS,估计难度较大.目前还处于Alpha状态,最终将会包含 ...
- STM32 + RT Thread OS 学习笔记[四]
1. 补注 a) 硬件,打通通讯通道 若学习者购买了学习板,通常可以在学习板提供的示例代码中找到LCD的相关驱动代码,基本上,这里的驱动的所有代码都可以从里面找到. 从上面的示意图可见,M ...
- RT thread 设备驱动组件之USART设备
本文以stm32f4xx平台介绍串口驱动,主要目的是:1.RTT中如何编写中断处理程序:2.如何编写RTT设备驱动接口代码:3.了解串行设备的常见处理机制.所涉及的主要源码文件有:驱动框架文件(usa ...
- RT Thread的SPI设备驱动框架的使用以及内部机制分析
注释:这是19年初的博客,写得很一般,理解不到位也不全面.19年末得空时又重新看了RTThread的SPI和GPIO,这次理解得比较深刻.有时间时再整理上传. -------------------- ...
- RT Thread SPI设备 使用
后记: 之前,我把SPI的片选在Cubemx中配置成了SPI_NSS.现在我给它改为了GPIO_OUTPUT. 同时参考了别人的类似的一个操作无线模块(采用SPI设备驱动)的例子程序(清楚了RTT的 ...
- 优先级反转实验,使用信号量实现【RT-Thread学习笔记 5】
RTOS中很经典的问题.就是在使用共享资源的时候,优先级低的进程在优先级高的进程之前执行的问题.这里模拟这种情况. 下面的实验模拟了优先级反转的情况: 先定义三个线程: //优先级反转实验 rt_se ...
- 线程让出实验【RT-Thread学习笔记 4】
API: rt_thread_yield 线程函数中调用,本线程释放MCU.如果此时有别的相同优先级的任务整处于等待状态,将获得MCU使用权. 线程让出就是给OS增加一个任务调度的机会. 创建两个线程 ...
随机推荐
- Add Scaffold
- if循环后打印数据竖行输出和横排输出
代码A如下: def func(*kargs): return kargs, l = func(5,3,4,5,6) for i in l: print (i) 打印结果: ...
- C#服务端的GET、POST请求
一.HttpClient方式,程序集 System.Net.Http.dll GET: HttpClient httpClient = new HttpClient(); string result ...
- redis缓存数据库及Python操作redis
缓存数据库介绍 NoSQL(NoSQL = Not Only SQL ),意即“不仅仅是SQL”,泛指非关系型的数据库,随着互联网web2.0网站的兴起,传统的关系数据库在应付web2.0网站, 特 ...
- Nginx(一) 简介
Nginx简介 一款基于异步框架的轻量级高性能的Web 服务器/反向代理服务器/缓存服务器/电子邮件(IMAP/POP3)代理服务器 特点 高并发量:基于 epoll/kqueue 模型开发,支持高并 ...
- 容器技术与docker
名词介绍 IaaS:基础设施即服务,要搭建上层数据应用,先得通过互联网获得基础性设施服务 PaaS:平台即服务,搭建平台,集成应用产品,整合起来提供服务 SaaS:软件即服务,通过网络提供程序应用类服 ...
- Jutil 单元测试
eclipse 自身集成了jtuil,右击项目,点击bulidpath,addjar,如下所示添加jutil 新建一个Junit的测试类用来测试上面的测试方法,新增Junit的测试类方法如下: // ...
- Django报错Watching for file changes with StatReloader
Django项目运行时出现:Watching for file changes with StatReloader错误 原因:环境里的django或者python的版本有问题 解决方案:升级或者降级D ...
- YYC松鼠短视频系统上传视频会被压缩的问题如何解决?
uni.chooseVideo({ count: 1, compressed: false, sourceType: ['album', 'camera'], success: (res) => ...
- 在Mysql中,事务是如何实现的呢?
hello大家好,我是一个爱看底层的小码,对于每一个学习mysql数据库的同学来说,事务都是一个绕不开的话题,简单的说来事务是指访问并可能更新数据库中各项数据项的一个程序执行单元.事务的四个特征无非就 ...