SLAM中的各种地图
1、地图的不同分类方式
地图有多种不同的分类方式,网上有不少帖子介绍各种各样的地图,但并没有非常完整的总结地图应该怎么分类。论文[1]中将地图分成以下几种:拓扑地图、度量地图、度量-语义地图和混合地图。我觉得按照这种方式进行归类相对比较科学。
1.1 拓扑地图
拓扑地图(Topological Map)使用节点和边来表示环境,其中节点表示重要位置(如拐角、门口),边表示这些位置之间的可达路径。拓扑地图注重表示环境的连接关系,而不是具体的几何细节。这种地图表示方法适用于大型、复杂环境中的高效路径规划和导航。个人简单理解为,是一种表示拓扑关系、不存在准确距离信息的地图,例如:我家地图是,客厅在中间,周围连着卧室、书房、厨房、卫生间,书房又连着阳台。
1.2 度量地图/尺度地图/几何地图
度量地图(Metric Map)或几何地图(Geometric Map)是SLAM种较为常用的一种表示方法,常见的点云(PointCloud)、八叉树地图(OctoMap)、栅格地图(Grid Map)等都属于度量地图,下一节会展开介绍。个人简单的理解为,能够从这个地图中获取具体的尺度信息,例如某个点距离某个点多远、XXX障碍物面积有多大。
根据地图的稠密程度,度量地图还可进一步分为:稀疏地图、稠密地图。稀疏地图例如视觉SLAM建立的特征点地图,是稀疏的,一般多用于自身定位而难以直接导航;而RGBD或LiDAR可以建立稠密地图。
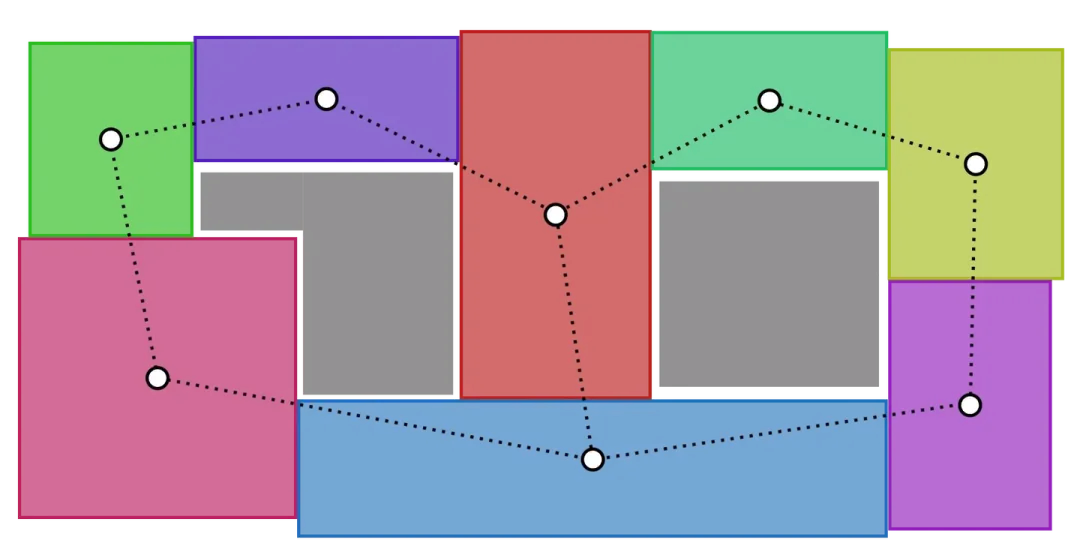
根据地图是连续的还是离散的,还可进一步分为:离散地图、连续地图。栅格地图、体素地图(Voxel Map)就是典型的离散地图,把空间进行了划分,然后离散化表达;连续地图是采用高斯过程或者NeRF方式建立的地图。
离散地图(左)与连续地图(右)
1.3 语义地图
语义地图(Semantic Map)是包含了语义信息的地图,语义信息可以是物体的种类、姿态和形状等描述。例如,无人驾驶需要知道地图中那些是车道、哪些是障碍。需要注意的是,只要包含于语义信息就可以算是语义地图,尺度地图、拓扑地图也可以是语义地图。
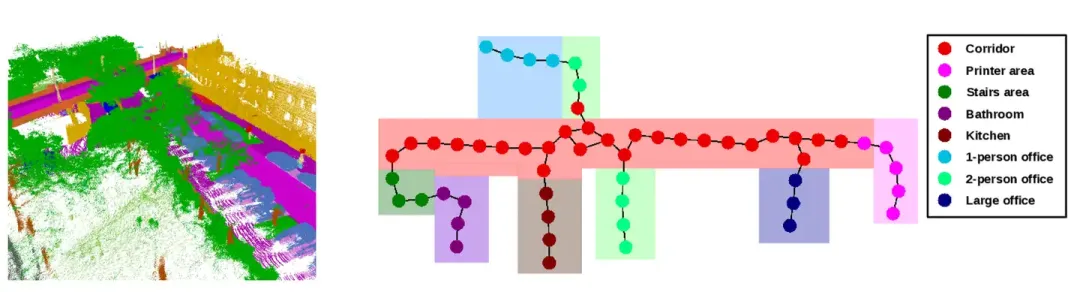
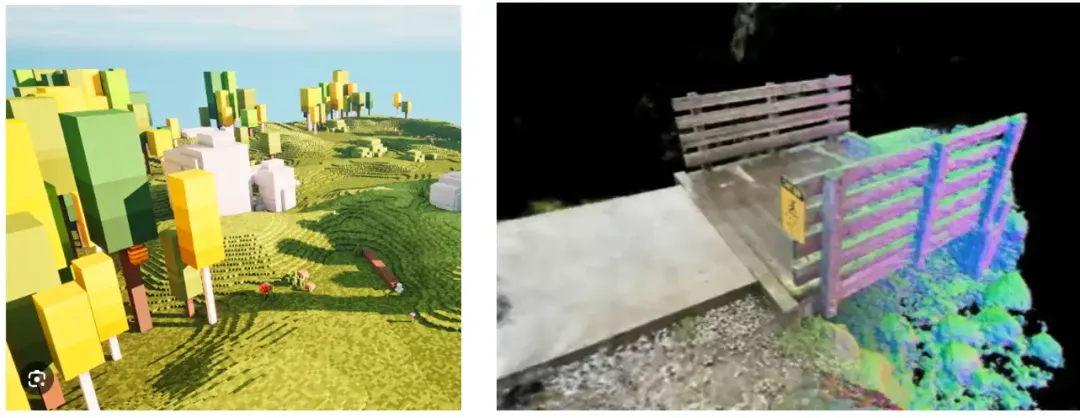
带语义信息的点云地图(左)和带语义信息的拓扑地图(右)
1.4 混合地图与多层级地图
混合地图(Hybrid Map)是一种结合多种地图表示的地图,例如在大范围导航时,我们可能既需要拓扑信息(从客厅到卧室),又需要尺度信息(走多少米),这就需要混合地图。
分层级地图(Hierarchy Map)顾名思义,是多层次的地图表示,通过将环境信息组织成不同层次以提高数据管理和处理的效率。例如无人驾驶时,顶层地图表示全局的道路网络,底层表示局部的道路详细结构,可以理解成“分辨率”从粗到细的过程,以适应不同的任务需求。
2、尺度地图细分
2.1 特征地图
特征地图(Feature Map)是仅保留特征的地图,常见于视觉SLAM。一些场景,例如水下的定位放置一些标志物,这样建立的地图就是特征点地图。视觉SLAM一般提取特征点匹配后建立特征点地图。除了点特征意外,线特征和面特征也可以建立地图,但也属于是特征地图的一种。

左:水下声呐建立的声呐目标特征点地图;中:vSLAM建立的特征点地图;右:线+面特征地图
2.2 点云地图
点云地图(Point Cloud Map)是利用点云形式表示地图,常见的激光雷达SLAM建立的都是点云地图。

2.3 栅格地图
栅格地图(Grid Map)将空间划分为均匀的网格,每个网格存储一个值,表征地图的属性。一种常见的方式,用三种状态:占用、空闲、未知,表示某个栅格是否被占用,这种表达方式称作“占用栅格地图”(Occupancy Grid Map),机器人导航常用栅格地图,在“空闲”栅格中规划运动轨迹。
一般来说,栅格地图指的是二维平面地图。

2.4 体素地图
体素地图(Voxel Map)可以理解为三维的栅格地图,当然也包括占用体素地图(Occupancy Grid Map)。如果是无人机这类的导航,一般需要用到3D的栅格地图。和点云地图相比,体素地图的“分辨率”更低,对点云地图进行了离散化。
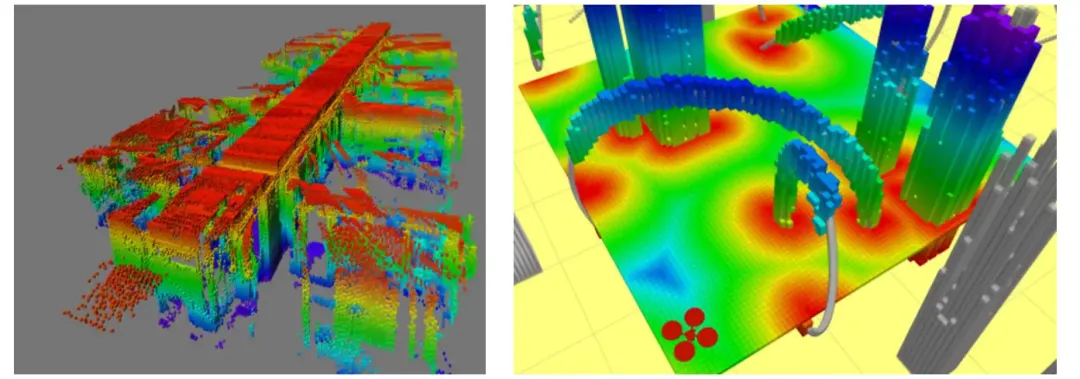
室内场景的占用栅格地图(左)和用于无人机导航的占用栅格地图(右)
2.5 高程地图
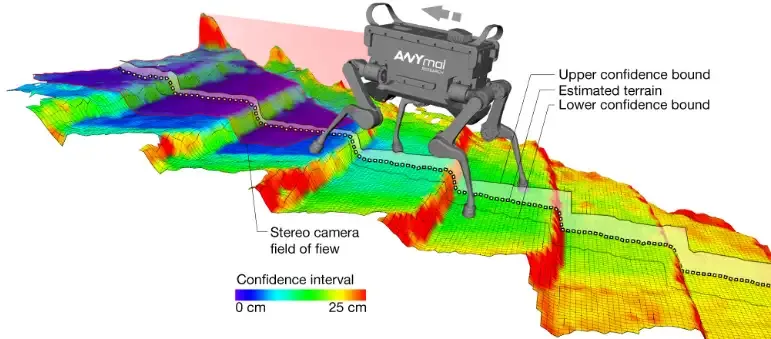
高程地图(Elevation Map)也称2.5D地图。如果是平坦地面、二维场景,用栅格地图就可以;如果是无人机,需要用到三维场景体素地图;但如果是无人车在非平坦路面运行、或者是四足/轮式机器人在野外的行进,需要对地形进行建模,常用的方式就是高程地图,例如经典的elevation mapping就是建立的高程地图[2]。在栅格地图的基础上增加了一个维度即高度。
2.6 神经辐射场地图
神经辐射场地图(Neural Radiance Fields, NeRF)是一种新兴的三维场景表示和渲染技术,通过神经网络隐式地表示三维空间中的颜色和密度场。其特点是高精度、连续表示、数据驱动。具体可参考[6]。

2.x 八叉树地图、ikdtree地图、哈希地图等
这些我认为不属于具体的地图表征形式,只是地图存储的数据结构。具体来说:
- 八叉树地图(Octree Map)是利用八叉树数据结构存储体素地图,可以节省数据存储空间。具体实现例如 OctoMap[3]
- ikdtree地图是动态kd-tree的地图,存储的是原始点云形式,由Fastlio2[4]采用,专门用于处理点云数据的高效存储、增量更新和查询
- 哈希地图(Hash Map)使用哈希函数将二维或者三维空间坐标映射到哈希表中,用于存储和检索空间信息,节省存储空间,存取速度快,可以存储点云地图、体素地图
除此之外,还有其他改进例如i-octree[5]等,不展开介绍。
3、一些讨论
这里记录一些自己学习的困惑,或者其他地方的讨论。
3.1 为什么要关注地图的表示?
对于最基础的SLAM而言,实现了定位与建图任务就可以了。但问题是,建立的地图要干什么、如何服务后面的任务?如果不加以考虑、忽视建图,就完全是一个定位过程了。所以,需要根据后续任务决定建立什么地图。
3.2 无人驾驶的高精度地图是什么?
个人简单总结,就是:尺度地图的绝对坐标精度更高,所包含的道路交通信息元素丰富细致。按照第一部分的分类,应该数据多层级地图。
4、小结
本文整理了一些SLAM领域常见的地图,但并没有细致讨论每种地图的优缺点以及应用场景。
参考文献
[1] Survey on Active Simultaneous Localization and Mapping: State of the Art and New Frontiers
[2] GitHub - ANYbotics/elevation_mapping: Robot-centric elevation mapping for rough terrain navigation
[3] https://octomap.github.io/
[4] FAST-LIO2: Fast Direct LiDAR-inertial Odometry
[5] zhujun:【ICRA 2024】i-Octree:快速、轻量级的动态八叉树
[6] LONER: LiDAR Only Neural Representations for Real-Time SLAM
https://zhuanlan.zhihu.com/p/708050126
SLAM中的各种地图的更多相关文章
- Slam(即时定位与地图构建) 知识篇
Slam即时定位与地图构建 技术解释 同步定位与地图构建(SLAM或Simultaneous localization and mapping)是一种概念:希望机器人从未知环境的未知地点出发,在运动过 ...
- 视觉SLAM中相机详解
视觉SLAM中,通常是指使用相机来解决定位和建图问题. SLAM中使用的相机往往更加简单,不携带昂贵的镜头,以一定的速率拍摄周围的环境,形成一个连续的视频流. 相机分类: 单目相机:只是用一个摄像头进 ...
- 视觉SLAM中的数学基础 第三篇 李群与李代数
视觉SLAM中的数学基础 第三篇 李群与李代数 前言 在SLAM中,除了表达3D旋转与位移之外,我们还要对它们进行估计,因为SLAM整个过程就是在不断地估计机器人的位姿与地图.为了做这件事,需要对变换 ...
- C# 程序中嵌入百度地图
本例是对WinForm中使用百度地图的简要介绍.百度地图目前支持Android开发,IOS开发,Web开发,服务接口,具体可以参照'百度地图开放平台'. [动态加载百度地图]涉及到的知识点: WebB ...
- 在ionic/cordova中使用百度地图插件
在ionic项目中,如果想实现定位功能,可以使用ng-cordova提供的cordova-plugin-geolocation. 但由于高墙的缘故,国内andorid环境下,此插件不起作用(ios环境 ...
- 视觉SLAM中的数学基础 第四篇 李群与李代数(2)
前言 理解李群与李代数,是理解许多SLAM中关键问题的基础.本讲我们继续介绍李群李代数的相关知识,重点放在李群李代数的微积分上,这对解决姿态估计问题具有重要意义. 回顾 为了描述三维空间里的运动,我们 ...
- SLAM中的EKF,UKF,PF原理简介
这是我在知乎上问题写的答案,修改了一下排版,转到博客里. 原问题: 能否简单并且易懂地介绍一下多个基于滤波方法的SLAM算法原理? 目前SLAM后端都开始用优化的方法来做,题主想要了解一下之前基于 ...
- Android 百度地图开发(一)--- 申请API Key和在项目中显示百度地图
标签: Android百度地图API Key 分类: Android 百度地图开发(2) 最近自己想研究下地图,本来想研究google Map,但是申请API key比较坑爹,于是从百度地 ...
- cocos2d-x中的Tiled地图
cocos2d-x中的瓦片地图是通过tiledMap软件制作的,存档格式是.tmx格式.此软件的使用步骤简单总结如下: (1)制作瓦片地图 1 打开软件,软件界面如下图. 2. 新建地图(文件-> ...
- Android应用中使用百度地图API并加入标注(一)
网上一些资料这样的的内容已经过时了,这里是最新的内容,假设哪里不正确,请吐槽... 1)下载百度地图移动版API(Android)开发包 要在Android应用中使用百度地图API,就须要 ...
随机推荐
- Gitee官网大规模封禁开源项目,如想解禁则需手动提交审核,在此过程中一些项目的信息也被gitee官方修改!!!
由于美国政府对中国的各种打压和制裁,为了支持国产软件我已经将GitHub上的大多数代码库迁移到了gitee上,虽然我的开源库基本都是个人学习时候的一些代码并不是什么成品项目代码,但是不管力量大小也都支 ...
- 证明: 设n阶方阵A相似于对角阵Λ, λ是A的k重特征值, 则r(λE-A)=n-k.
命题: 设n阶方阵A相似于对角阵Λ, λ是A的k重特征值, 则r(λE-A)=n-k.证明: 由定理3.9: A~Λ <=> A有n个线性无关的特征向量, 知k重特征值λ存在k个线性无关的 ...
- dubbo超时异常
荐
dubbo超时异常 在调用dubbo服务时经常看到如下错误: Caused by: com.alibaba.dubbo.remoting.TimeoutException: Waiting serve ...
- C#实现国产Linux视频录制生成mp4(附源码,银河麒麟、统信UOS)
随着信创国产化浪潮的来临,在国产操作系统上的应用开发的需求越来越多,最近有个客户需要在银河麒麟或统信UOS上实现录制摄像头视频和麦克风声音,将它们录制成一个mp4文件.那么这样的功能要如何实现了? 一 ...
- 去除WinForm程序中的Devexpress弹窗
去除WinForm程序中的Devexpress弹窗 /// <summary> /// 应用程序的主入口点. /// </summary> [STAThread] static ...
- Oracle数据库安装与还原
安装Oracle 11g数据库 安装数据库参考这位大佬的文章:(135条消息) Oracle 11g版本下载及安装超详细教程图解_oracle11g下载_田夜的博客-CSDN博客 非常详细 利用dmp ...
- 声明式 Shadow DOM:简化 Web 组件开发的新工具
在现代 Web 开发中,Web 组件已经成为创建模块化.可复用 UI 组件的标准工具.而 Shadow DOM 是 Web 组件技术的核心部分,它允许开发人员封装组件的内部结构和样式,避免组件的样式和 ...
- RxJS 系列 – 实战练习
前言 这篇主要是给一些简单例子, 从中体会 RxJS 在管理上的思路. Slide Down Effect with Dynamic Content 我在这篇 CSS & JS Effect ...
- ASP.NET Core – Try Preview
前言 .NET 7 已经来到 RC 阶段了. 通常 RC 就是我们 (写库的人) 要入场的时候了. 有发现 Bug 要尽可能在这段期间提交. 不然后患无穷. 这篇主要就是来讲讲如果测试 RC 版本的 ...
- MyBatis——简介
MyBatis MyBatis 是一款优秀的持久层框架,用于简化 JDBC 开发 官网:https://mybatis.net.cn/ 持久层 负责将数据保存到数据库的那一层代码 javaEE 三层架 ...