目标检测算法之R-CNN算法详解
R-CNN全称为Region-CNN,它可以说是第一个成功地将深度学习应用到目标检测上的算法。后面提到的Fast R-CNN、Faster R-CNN全部都是建立在R-CNN的基础上的。
传统目标检测流程:
(1)区域选择(穷举策略:采用滑动窗口,且设置不同的大小,不同的长宽比对图像进行遍历,时间复杂度高)
(2)特征提取(SIFT、HOG等;形态多样性、光照变换多样性、背景多样性使得特征鲁棒性差)
(3)分类器分类(SVM、Adaboost)
一、RCNN思路(Selective Search + CNN + SVM)
R-CNN遵循传统目标检测的思路,同样采用,对每个框提取特征、图像分类、非极大值抑制四个步骤进行目标检测,只不过进行了部分的改进。
- 经典的目标检测算法使用滑动窗法去依次判断所有可能的区域。而这里预先提取一系列较可能是物体的候选区域,之后仅在这些候选区域上提取特征,进行判断,大大减少了计算量
- 将传统的特征(如SIFT,HOG特征等)换成了深度卷积网络提取特征
&创新点
1. 采用CNN网络提取图像特征,从经验驱动的人造特征范式HOG、SIFT到数据驱动的表示学习范式,提高特征对样本的表示能力
2. 采用大样本下有监督预训练+小样本微调的方式解决小样本难以训练甚至过拟合等问题
二、算法步骤
数据集采用pascal VOC,这个数据集的object一共有20个类别。首先用selective search方法在每张图像上选取约2000个region proposal,region proposal就是object有可能出现的位置。然后根据这些region proposal构造训练和测试样本,注意这些region proposal的大小不一,另外样本的类别是21个(包括了背景)
简要步骤如下:
(1)输入测试图像,利用选择性搜索selective search在图像中从下到上提取2000个左右的可能包含物体的候选区域Region Proposal
(2)先在每个建议框周围加上16个像素值为建议框像素平均值的边框,在直接变形为227x227的大小(Alexnet的尺寸)
(3)先将所有建议框像素减去该建议框像素平均值,将每个227x227输入Alexnet CNN网络获取4096维特征。2000个建议框的CNN特征组合成2000x4096维矩阵
(4)将2000x4096维特征与20个SVM组成权值矩阵4096x2000相乘(20种分类,SVM是二分类器,则有20个SVM),获得2000x20维矩阵表示每个建议框是某个物体类别的得分
(5)对上述2000x20维矩阵中每一列即每一类进行非极大值抑制剔除重叠建议框,得到该列即该类中得分最高的一些建议框
(6)分别用20个回归器对上述20个类别中剩余的建议框进行回归操作,最终得到每个类别的修正后的得分最高的bounding box
具体步骤如下:
步骤一:下载一个分类模型(Alexnet)
步骤二:对该模型做fine-tuning
• 将分类数从1000改为21,比如20种物体 + 1个背景
• 去掉最后一个全连接层
步骤三:特征提取
• 提取图像的所有候选框(选择性搜索Selective Search)
• 对于每一个区域:修正区域大小以适合CNN的输入,做一次前向运算,将第五个池化层的输出(对候选框提取到的特征)存到硬盘
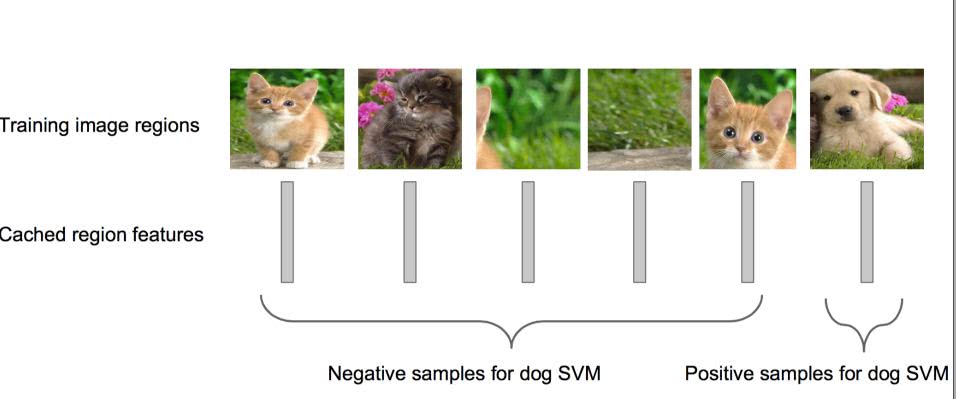
步骤四:训练一个SVM分类器(二分类)来判断这个候选框里物体的类别
每个类别对应一个SVM,判断是不是属于这个类别,是就是positive,反之nagative。
比如下图,就是狗分类的SVM
步骤五:使用回归器精细修正候选框位置:对每一个类,训练一个线性回归模型去判定这个框是否框的完美

&缺点
R-CNN第一步对原始图片通过Selective Search提取的候选框region proposal多大2000个左右,而这2000个候选框每个框度需要进行CNN提取特征 + SVM分类,计算量很大,导致R-CNN检测速度很慢,一张图都要47s
参考地址:
https://cloud.tencent.com/developer/news/281788
https://blog.csdn.net/wopawn/article/details/52133338
https://www.cnblogs.com/zyly/p/9246221.html
目标检测算法之R-CNN算法详解的更多相关文章
- 目标检测之Faster-RCNN的pytorch代码详解(模型准备篇)
十月一的假期转眼就结束了,这个假期带女朋友到处玩了玩,虽然经济仿佛要陷入危机,不过没关系,要是吃不上饭就看书,吃精神粮食也不错,哈哈!开个玩笑,是要收收心好好干活了,继续写Faster-RCNN的代码 ...
- 目标检测之Faster-RCNN的pytorch代码详解(模型训练篇)
本文所用代码gayhub的地址:https://github.com/chenyuntc/simple-faster-rcnn-pytorch (非本人所写,博文只是解释代码) 好长时间没有发博客了 ...
- 目标检测之Faster-RCNN的pytorch代码详解(数据预处理篇)
首先贴上代码原作者的github:https://github.com/chenyuntc/simple-faster-rcnn-pytorch(非代码作者,博文只解释代码) 今天看完了simple- ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- Canny边缘检测算法原理及其VC实现详解(一)
转自:http://blog.csdn.net/likezhaobin/article/details/6892176 图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个 ...
- Floyd算法(一)之 C语言详解
本章介绍弗洛伊德算法.和以往一样,本文会先对弗洛伊德算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3 ...
- Dijkstra算法(一)之 C语言详解
本章介绍迪杰斯特拉算法.和以往一样,本文会先对迪杰斯特拉算法的理论论知识进行介绍,然后给出C语言的实现.后续再分别给出C++和Java版本的实现. 目录 1. 迪杰斯特拉算法介绍 2. 迪杰斯特拉算法 ...
- 二分算法题目训练(二)——Exams详解
CodeForces732D——Exams 详解 Exam 题目描述(google翻译) Vasiliy的考试期限将持续n天.他必须通过m门科目的考试.受试者编号为1至m. 大约每天我们都知道当天可以 ...
- spfa算法及判负环详解
spfa (Shortest Path Faster Algorithm) 是一种单源最短路径的算法,基于Bellman-Ford算法上由队列优化实现. 什么是Bellman_Ford,百度内 ...
- Canny边缘检测算法原理及其VC实现详解(二)
转自:http://blog.csdn.net/likezhaobin/article/details/6892629 3. Canny算法的实现流程 由于本文主要目的在于学习和实现算法,而对于图像 ...
随机推荐
- springboot多模块开发以及整合dubbo\zookeeper进行服务管理
之前研究了springboot单工程的使用,参考git地址:https://github.com/qiao-zhi/springboot-ssm 下面研究springboot多模块开发的过程. 1.模 ...
- 20165231 2017-2018-2 《Java程序设计》第1周学习总结
本周学习的是一些java简单的基本编译,反编译和解释器.然后学习使用git了上传到git@osc进行代码托管,git是初学的,需要建立库然后远程上传代码,如果建立失败或者因为种种缘故无法上传的可以一个 ...
- 统计分析与R软件-chapter2-3
2.3 对象和它的模式与属性 R是一种基于对象的语言,R的对象包含了若干个元素作为其数据,另外还可以有一些特殊数据称为属性,并规定了一些特定操作(如打印.绘图).比如,一个向量是一个对象,一个图形也是 ...
- 积分从入门到放弃<2>
这部分重新从定积分学了 1,lnx 的导数就是x^(-1) = 1/x 那么求∫(1/x)dx = ln|x|+C 2,初值问题.就是求∫f(x)dx = F(x) + C 求C . 3,Houdi ...
- vue之登录和token处理
应用场景一 Vue刷新token,判断token是否过期.失效,进行登录判断跟token值存储 刷新token和token是否过期的操作都是由后端实现,前端只负责根据code的不同状态来做不同的操作: ...
- jmeter设置全局变量
2017年4月20日 10:07:37 星期四 情景, 从第一个请求的结果中匹配出code, 当作参数去做下次请求 以抢红包为例: 1. 创建红包, 并从返回结果中获取红包code 2. 将code设 ...
- Golang channel 特性
最近在项目中遇到了 Go channel 的一些问题,在此记录下 close channel 的一些特性. 关闭channel ch := make(chan bool) close(ch) clos ...
- 通信——基于Xmpp协议实现的聊天室
前段时间写了个自定义通信协议的聊天室(即用\r\n标记字符串,作为一句话),总感觉自己弄的那个协议实现虽然简单,但是拓展性就太差了,只适合于发送聊天的内容,难以包含更多的信息.基于上述几点,于是就开始 ...
- win10:家庭版开启组策略
1.新建一个txt文件 2.复制以下内容到txt文件 @echo off pushd "%~dp0" dir /b C:\Windows\servicing\Packages\Mi ...
- android SDK与ADT版本更新问题
android SDK与ADT版本更新问题 问题:This Android SDK requires Android Developer Toolkit version 14.0.0 or above ...