Bresenham算法的实现思路
条件已知两个点的坐标p1(x0,y0),p2(x1,y1)要求画出这条直线
之后的e代表每次的误差积累,初始值为0,可以计算出斜率为k=dy/dx=(y0-y1)/(x0-x1)
1、x为阶跃步长(直线光栅化) 适用于0<k<1的情况
即x每次增加1,但是y的坐标根据其是靠近该点所处的单元格的距离来决定,如果离上边近则y加1,如果离下边近则还是y
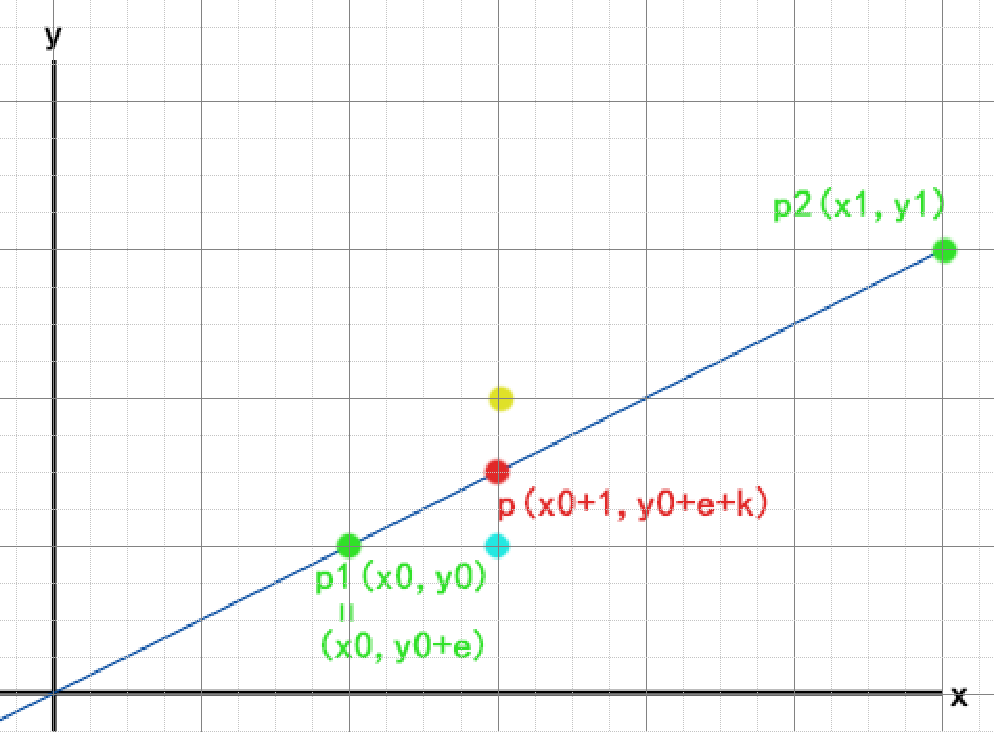
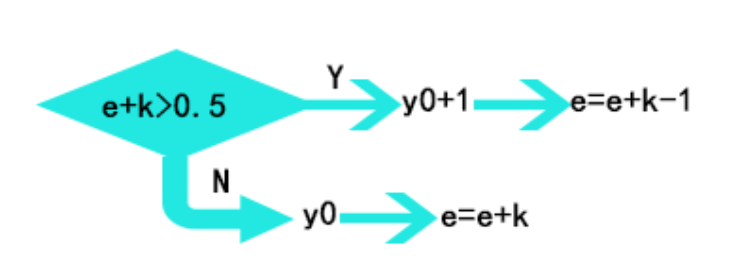
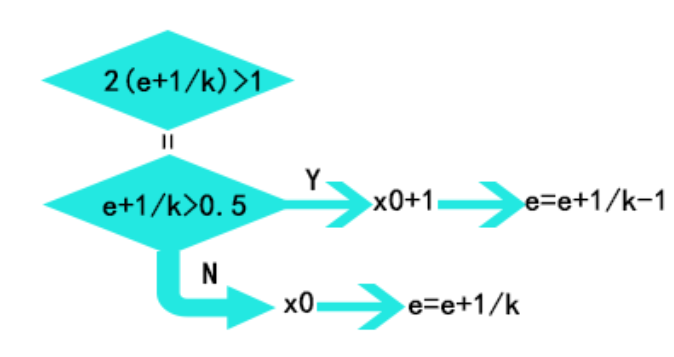
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0,y0+e),那么可以知道下个点的坐标为红色的p(x0+1,y0+e+k),但是机器在画p点时,如果p点的纵坐标不是整数时,应该进行判断这个点是接近黄点(x0+1,y0+1)还是接近蓝点(x0+1,y0),最后如果接近黄点则e累积k-1,如果接近蓝点则e累积k
在判断条件的两边同乘2得:
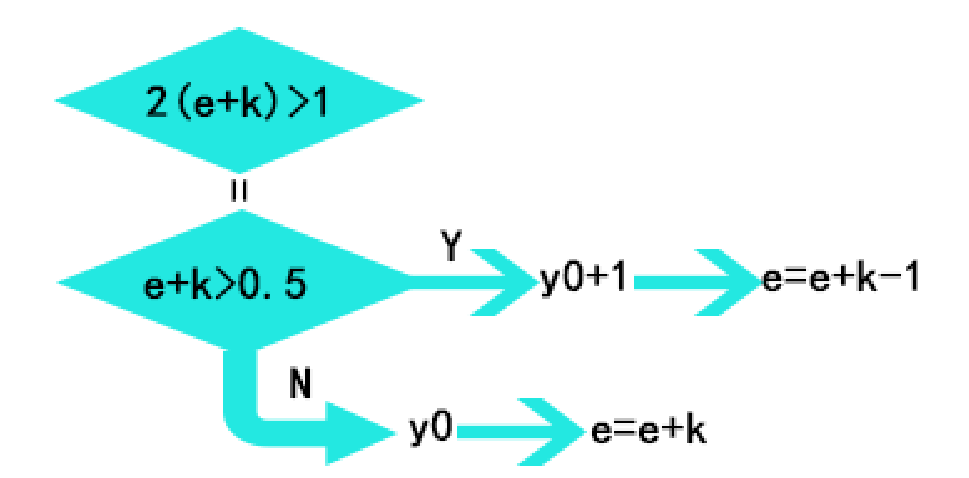
那么程序为:
void LineB2(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float k,e;
dx=x1-x0;
dy=y1-y0;
k=(float)dy/dx;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
e=e+k;
if(e>=){
y+=;
e=e-;
}
}
}
上面的程序中e使用了多次除法运算,算法效率低。
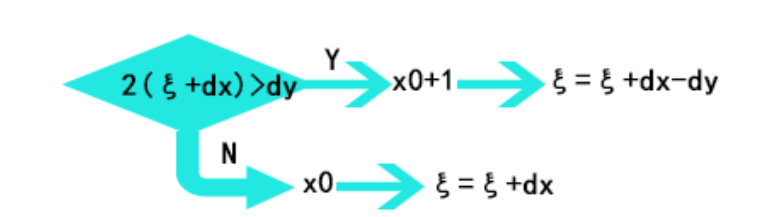
优化
将上面的k使用dy/dx替换,并且同乘dx后,令ξ=dx*e则:
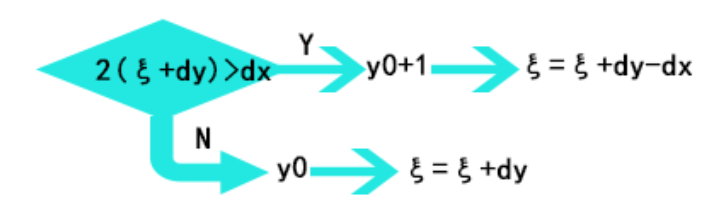
则程序为:
//在程序中e为上面的ξ
void LineB3(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float e=;
dx=x1-x0;
dy=y1-y0;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
if(*(e+dy)>=dx){
y+=;
e=e+dy-dx;
}else{
e=e+dy;
}
}
}
2、y为阶跃步长(直线光栅化) 适用于k>1的情况
同上可以推出:
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0+e,y0),那么可以知道下个点的坐标为红色的p(x0+e+1/k,y0+1),但是机器在画p点时,如果p点的横坐标不是整数时,应该进行判断这个点是接近右边(x0+1,y0+1)还是接近蓝左边(x0,y0+1),最后如果接近右边则e累积1、k-1,如果接近左边则e累积1/k
优化得:
将上面的k使用dy/dx替换,并且同乘dy后,令ξ=dy*e则:
对于k<-1和-1<=k<=0可以通过对x取相反数来实现(与以上两种情况关于y轴对称)
Bresenham算法的实现思路的更多相关文章
- 直线的中点Bresenham算法的实现
一.实验目的 1.掌握在MFC中搭建图形绘制的基本框架的方法: 2.将直线的中点Bresenham算法转化成可执行代码. 二.实验内容 1. 通过分析具体数据在中点Bresenham算法上的执行过程, ...
- SSE图像算法优化系列十三:超高速BoxBlur算法的实现和优化(Opencv的速度的五倍)
在SSE图像算法优化系列五:超高速指数模糊算法的实现和优化(10000*10000在100ms左右实现) 一文中,我曾经说过优化后的ExpBlur比BoxBlur还要快,那个时候我比较的BoxBlur ...
- 万字长文,以代码的思想去详细讲解yolov3算法的实现原理和训练过程,Visdrone数据集实战训练
以代码的思想去详细讲解yolov3算法的实现原理和训练过程,并教使用visdrone2019数据集和自己制作数据集两种方式去训练自己的pytorch搭建的yolov3模型,吐血整理万字长文,纯属干货 ...
- 图像数据到网格数据-2——改进的SMC算法的实现
概要 本篇接上一篇继续介绍网格生成算法,同时不少内容继承自上篇.上篇介绍了经典的三维图像网格生成算法MarchingCubes,并且基于其思想和三角形表实现了对样例数据的网格构建.本篇继续探讨网格生成 ...
- Bug2算法的实现(RobotBASIC环境中仿真)
移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求--避障.之前简单介绍过Bug避障算法,但仅仅了解大致理论而不亲自动手实现一遍很难有深刻的印象,只能说似懂非懂.我不是天才,不 ...
- Canny边缘检测算法的实现
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波.我们知道微分运算是求信号的变化率,具有加强高频分量的作用.在空域运算中来说,对图像的锐化就是计算微分.由于数字图像的离散信号, ...
- java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现
java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现 java基础解析系列(一)---String.StringBuffer.StringBuilder java基础解析 ...
- 详解Linux内核红黑树算法的实现
转自:https://blog.csdn.net/npy_lp/article/details/7420689 内核源码:linux-2.6.38.8.tar.bz2 关于二叉查找树的概念请参考博文& ...
- 详细MATLAB 中BP神经网络算法的实现
MATLAB 中BP神经网络算法的实现 BP神经网络算法提供了一种普遍并且实用的方法从样例中学习值为实数.离散值或者向量的函数,这里就简单介绍一下如何用MATLAB编程实现该算法. 具体步骤 这里 ...
随机推荐
- Bitmap那些事之内存占用计算和加载注意事项
前言:本来我是做电视应用的,但是因为公司要出手机,人员紧张,所以就抽调我去支援一下,谁叫俺是雷锋呢!我做的一个功能就是处理手机中的应用ICON,处理无非就是美化一下,重新与底板进行合成和裁剪,用到了很 ...
- vue的router-link传参问题
一般来说,可以通过查询字符串的方式将参数传过去,方法如下: <router-link :to="{path:'/Detail', query:{ name: id }}"&g ...
- leetcode — set-matrix-zeroes
import java.util.Arrays; /** * Source : https://oj.leetcode.com/problems/set-matrix-zeroes/ * * * Gi ...
- 使用docker部署flask遇到的问题
容器内能访问,但是外网映射了端口怎么也访问不了 解决方法: app.run() 添加参数host='0.0.0.0'
- Socket网络编程基本介绍
一,socket的起源 socket一词的起源 在组网领域的首次使用是在1970年2月12日发布的文献IETF RFC33中发现的, 撰写者为Stephen Carr.Steve Crocker和Vi ...
- pip/pip3更换国内源
pip/pip3更换国内源 用途:pip更换为国内源,可以大大的提高安装成功率和速度. Windows更换pip/pip3源 打开目录:%appdata% 新增pip文件夹,新建pip.ini文件 给 ...
- Java——this关键字
前言 this关键字属于Java中比较复杂的关键字之一,若是学习过C++或者其他的一些面向对象语言也会遇到this这个关键字并且都会看到this的含义就是表示当前对象.什么叫做表示当前对象?this在 ...
- bash内置命令mapfile:读取文件内容到数组
bash提供了两个内置命令:readarray和mapfile,它们是同义词.它们的作用是从标准输入读取一行行的数据,然后每一行都赋值给一个数组的各元素.显然,在shell编程中更常用的是从文件.从管 ...
- MySQL中间件之ProxySQL(4):多层配置系统
返回ProxySQL系列文章:http://www.cnblogs.com/f-ck-need-u/p/7586194.html 1.ProxySQL中的库 使用ProxySQL的Admin管理接口连 ...
- [转]Angular4首页加载慢优化之路
本文转自:https://blog.csdn.net/itest_2016/article/details/80048398 Angular是一个比较完善的前端MVC框架,包含了模板,数据双向绑定,路 ...