Bresenham算法的实现思路
条件已知两个点的坐标p1(x0,y0),p2(x1,y1)要求画出这条直线
之后的e代表每次的误差积累,初始值为0,可以计算出斜率为k=dy/dx=(y0-y1)/(x0-x1)
1、x为阶跃步长(直线光栅化) 适用于0<k<1的情况
即x每次增加1,但是y的坐标根据其是靠近该点所处的单元格的距离来决定,如果离上边近则y加1,如果离下边近则还是y
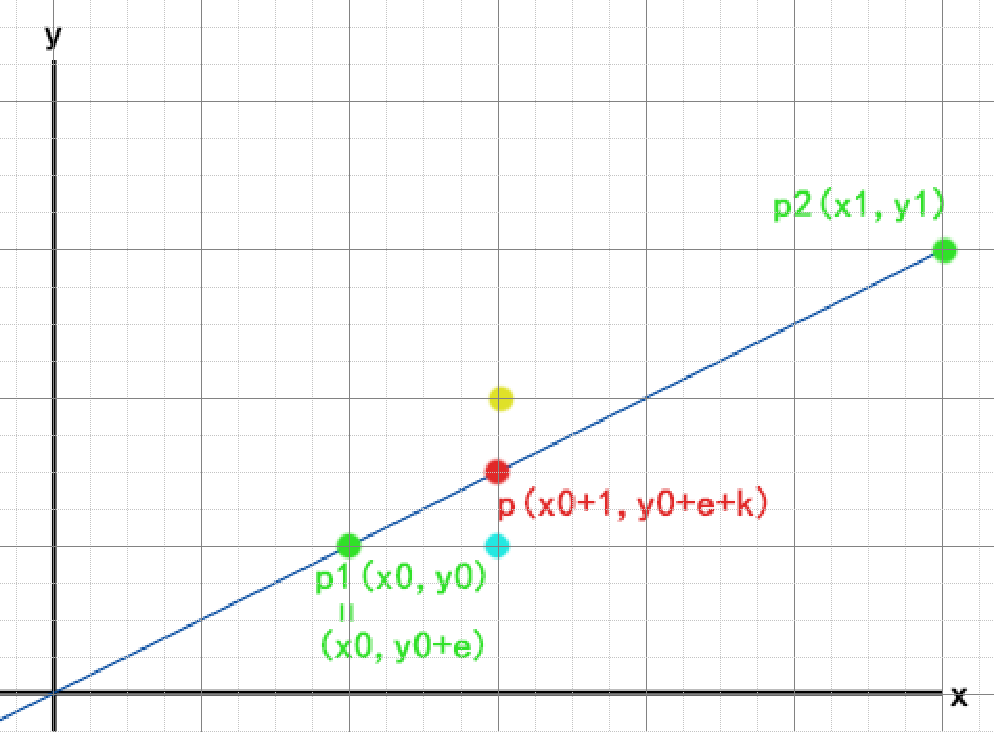
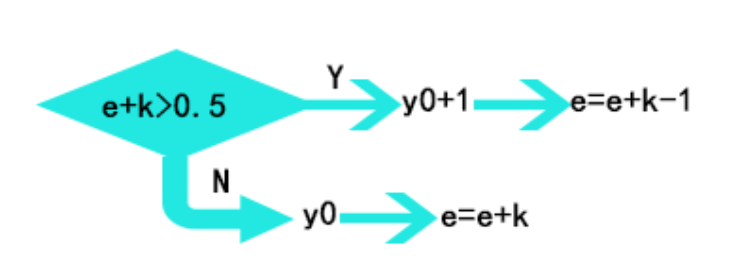
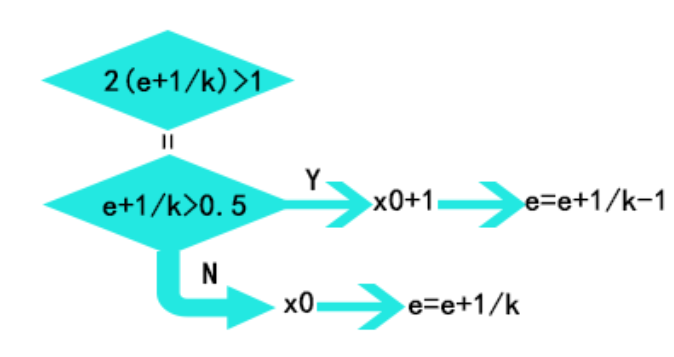
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0,y0+e),那么可以知道下个点的坐标为红色的p(x0+1,y0+e+k),但是机器在画p点时,如果p点的纵坐标不是整数时,应该进行判断这个点是接近黄点(x0+1,y0+1)还是接近蓝点(x0+1,y0),最后如果接近黄点则e累积k-1,如果接近蓝点则e累积k
在判断条件的两边同乘2得:
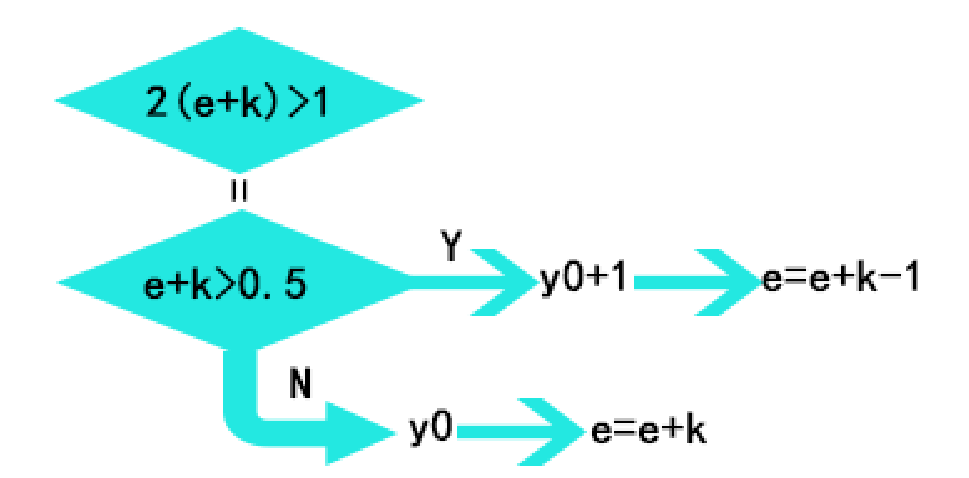
那么程序为:
void LineB2(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float k,e;
dx=x1-x0;
dy=y1-y0;
k=(float)dy/dx;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
e=e+k;
if(e>=){
y+=;
e=e-;
}
}
}
上面的程序中e使用了多次除法运算,算法效率低。
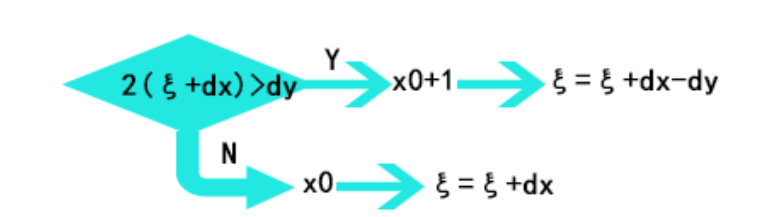
优化
将上面的k使用dy/dx替换,并且同乘dx后,令ξ=dx*e则:
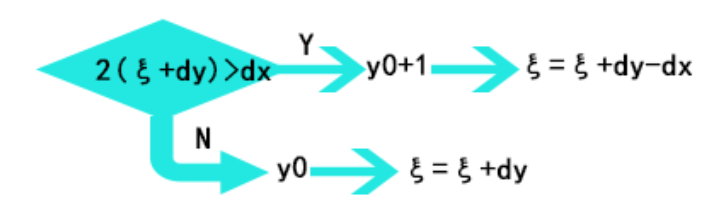
则程序为:
//在程序中e为上面的ξ
void LineB3(int x0,int y0,int x1,int y1,int color,CDC *p){
int i,x,y,dx,dy;
float e=;
dx=x1-x0;
dy=y1-y0;
e=-0.5;x=x0;y=y0;
for(i=;i<=dx;i++){
p->SetPixel(x,y,color);
x=x+;
if(*(e+dy)>=dx){
y+=;
e=e+dy-dx;
}else{
e=e+dy;
}
}
}
2、y为阶跃步长(直线光栅化) 适用于k>1的情况
同上可以推出:
可以知道机器在画每一个点的时候都会有误差,则画出的第一个点的坐标(x0,y0)也相当于是(x0+e,y0),那么可以知道下个点的坐标为红色的p(x0+e+1/k,y0+1),但是机器在画p点时,如果p点的横坐标不是整数时,应该进行判断这个点是接近右边(x0+1,y0+1)还是接近蓝左边(x0,y0+1),最后如果接近右边则e累积1、k-1,如果接近左边则e累积1/k
优化得:
将上面的k使用dy/dx替换,并且同乘dy后,令ξ=dy*e则:
对于k<-1和-1<=k<=0可以通过对x取相反数来实现(与以上两种情况关于y轴对称)
Bresenham算法的实现思路的更多相关文章
- 直线的中点Bresenham算法的实现
一.实验目的 1.掌握在MFC中搭建图形绘制的基本框架的方法: 2.将直线的中点Bresenham算法转化成可执行代码. 二.实验内容 1. 通过分析具体数据在中点Bresenham算法上的执行过程, ...
- SSE图像算法优化系列十三:超高速BoxBlur算法的实现和优化(Opencv的速度的五倍)
在SSE图像算法优化系列五:超高速指数模糊算法的实现和优化(10000*10000在100ms左右实现) 一文中,我曾经说过优化后的ExpBlur比BoxBlur还要快,那个时候我比较的BoxBlur ...
- 万字长文,以代码的思想去详细讲解yolov3算法的实现原理和训练过程,Visdrone数据集实战训练
以代码的思想去详细讲解yolov3算法的实现原理和训练过程,并教使用visdrone2019数据集和自己制作数据集两种方式去训练自己的pytorch搭建的yolov3模型,吐血整理万字长文,纯属干货 ...
- 图像数据到网格数据-2——改进的SMC算法的实现
概要 本篇接上一篇继续介绍网格生成算法,同时不少内容继承自上篇.上篇介绍了经典的三维图像网格生成算法MarchingCubes,并且基于其思想和三角形表实现了对样例数据的网格构建.本篇继续探讨网格生成 ...
- Bug2算法的实现(RobotBASIC环境中仿真)
移动机器人智能的一个重要标志就是自主导航,而实现机器人自主导航有个基本要求--避障.之前简单介绍过Bug避障算法,但仅仅了解大致理论而不亲自动手实现一遍很难有深刻的印象,只能说似懂非懂.我不是天才,不 ...
- Canny边缘检测算法的实现
图像边缘信息主要集中在高频段,通常说图像锐化或检测边缘,实质就是高频滤波.我们知道微分运算是求信号的变化率,具有加强高频分量的作用.在空域运算中来说,对图像的锐化就是计算微分.由于数字图像的离散信号, ...
- java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现
java基础解析系列(四)---LinkedHashMap的原理及LRU算法的实现 java基础解析系列(一)---String.StringBuffer.StringBuilder java基础解析 ...
- 详解Linux内核红黑树算法的实现
转自:https://blog.csdn.net/npy_lp/article/details/7420689 内核源码:linux-2.6.38.8.tar.bz2 关于二叉查找树的概念请参考博文& ...
- 详细MATLAB 中BP神经网络算法的实现
MATLAB 中BP神经网络算法的实现 BP神经网络算法提供了一种普遍并且实用的方法从样例中学习值为实数.离散值或者向量的函数,这里就简单介绍一下如何用MATLAB编程实现该算法. 具体步骤 这里 ...
随机推荐
- android 错误处理思维随笔
错误信息:An error occurred while preparing SDK package Android SDK Build-Tools 26.0.1 错误分析:大概率更新超时:小概率上次 ...
- salesforce零基础学习(九十三)Email To Case的简单实现
Salesforce提供了标准的功能来实现通过Email 创建 Case.我们可以设置指定的路由的地址,指定条件的邮件会自动生成到目标salesforce系统的Case数据.Salesforce提供了 ...
- Go基础系列:常量和变量
常量(Constants)和iota 常量包含不会发生更改的数据.常量的数据类型只能是boolean.number(int/float/complex)或string. 定义方式: const NAM ...
- 了解golang的可变参数(... parameters),这一篇就够了
在实际开发中,总有一些函数的参数个数是在编码过程中无法确定的,比如我们最常用的fmt.Printf和fmt.Println: fmt.Printf("一共有%v行%v列\n", r ...
- 《C#并发编程经典实例》学习笔记-进程(process)和线程(thread)
本文主要参考自孙钟秀主编的<操作系统教程>一书中关于进程和线程的部分. 进程 为什么引入进程? 一,刻画系统动态性,发挥系统并发性,提高资源利用率. 以C#为例,在编辑器Visual St ...
- [翻译]一个新式的基于文本的浏览器 Browsh
介绍 什么是Browsh? Browsh是一个纯文本浏览器,可以运行在大多数的TTY终端环境和任何浏览器.目前1 ,终端客户端比浏览器客户端更先进2. TTY 客户端 终端客户端即时更新和交付,以便于 ...
- centos7+openvpn+easy3.0
openvpn介绍 OpenVPN 是一个基于 OpenSSL库的应用层 VPN 实现.和传统 VPN 相比,它的优点是简单易用.vpn直译就是虚拟专用通道,是提供企业之间或者公司之间安全数据传输的 ...
- Linux下尝鲜IDE Rider .NET又一开发利器
RiderRS 扯淡:很多人说:jetbrains出品,必属精品,jetbrains确实出了不少好东西,但是他的产品总感觉越用越慢,我的小Y430P高配版也倍感压力,内存占用率高. Multiple ...
- SVN、CVS、VSS区别
废话不多说,撸起袖子敲黑板 !~~ #首先向大家简要描述一下SVN与CVS.VSS的介绍与对比: 介绍: 三种都是版本控制软件, 多数用于源代码管理1.CVS(Concurrent Version S ...
- [android] 绑定方式开启服务&调用服务的方法
需求:后台开启一个唱歌服务,这个服务里面有个方法切换歌曲 新建一个SingService继承系统Service 重写onCreate()和onDestory()方法 填一个自定义的方法changeSi ...